1.本实用新型涉及一种具有存储谷粒的谷粒箱以及能够排出谷粒箱的谷粒的谷粒排出装置的收割机。
背景技术:
2.谷粒排出装置具有:纵搬运部,连接在谷粒箱的下部并沿着上下方向配置;以及横搬运部,以能够绕水平轴心上下摆动的方式连结在纵搬运部的上部。通过升降缸对横搬运部进行升降操作。并且,还具有检测横搬运部的上下摆动位置的上下位置传感器,根据其检测结果良好地进行谷粒排出装置的姿势变更。
3.上下位置传感器具有绕与横搬运部的水平轴心不同的轴心摆动的检测臂,并检测与横搬运部连动而摆动的检测臂的摆动量。然而,就上述上下位置传感器而言,以往,当纵搬运部在上下方向上的可动范围变更等时,可能因组装误差等各种原因导致不能准确地进行检测。
技术实现要素:
4.(本实用新型要解决的问题)
5.由此,本实用新型希望实现一种检测横搬运部的上下摆动位置的上下位置传感器能够准确地完成检测动作的收割机。
6.(解决问题的方案)
7.本实用新型的收割机的特征在于,具有:谷粒箱,存储谷粒;谷粒排出装置,具有纵搬运部和横搬运部,所述纵搬运部连接在所述谷粒箱的下部并沿着上下方向配置,所述横搬运部以能够绕水平轴心上下摆动的方式连结在所述纵搬运部的上部,所述谷粒排出装置能够从设置于所述横搬运部的终端部的谷粒排出口排出所述谷粒箱的谷粒;升降缸,绕所述水平轴心对所述横搬运部进行升降操作;升降部件,随着所述横搬运部的上下摆动而上下移动;以及上下位置传感器,检测所述横搬运部的上下摆动位置,所述上下位置传感器具有:检测臂,与设置于所述升降部件的行程面接触并转动;以及传感器主体部,检测所述检测臂的转动角度,所述上下位置传感器在跨第一位置和第二位置的所述行程面的范围内使所述检测臂接触所述升降部件,所述第一位置为当所述升降部件处于最大上升位置时设置于所述检测臂的接触部与所述升降部件接触的位置,所述第二位置为当所述升降部件处于最大下降位置时所述检测臂的所述接触部与所述升降部件接触的位置,所述检测臂能够转动至比所述接触部接触所述升降部件的所述第二位置的状态更靠下降侧的位置,所述收割机还具有限制部,即使所述升降部件向比所述最大下降位置更靠下降侧的位置移动,所述限制部也能够阻止所述检测臂转动至不能返回所述行程面的不能返回位置。
8.根据本实用新型,随着横搬运部的上下摆动,升降部件在最大上升位置和最大下降位置的范围内上下移动。检测臂的接触部接触升降部件的行程面并上下移动。检测臂的接触部在升降部件的跨第一位置(对应于最大上升位置)和第二位置(对应于最大下降位
置)的行程面的范围内一边接触一边移动。
9.检测臂能够转动至比接触部接触升降部件的第二位置的状态更靠下降侧的位置。只要检测臂的接触部在行程面的范围内移动就没有问题,但若因各种原因导致升降部件向比预先设定的最大下降位置更靠下降侧的位置移动,则可能导致检测臂的接触部超过行程面的范围而溢出。
10.为此,根据本实用新型,具有阻止因上述溢出导致检测臂转动至不能返回行程面的不能返回位置的限制部。结果是,即使升降部件向比预先设定的最大下降位置更靠下降侧的位置移动,检测臂的接触部也能够返回行程面,从而使上下位置传感器能够准确地完成检测动作。
11.在本实用新型中,作为优选,在所述检测臂位于比界限点更靠上升侧的位置的状态下,所述限制部限制所述检测臂向下降侧转动,所述界限点为相对于包含所述检测臂的所述接触部的转动轨迹的虚拟圆而言所述行程面作为切线的点。
12.当检测臂从上升侧的位置向下降侧转动时,在超过界限点向下降侧转动之后,若升降部件上升,则检测臂会进一步向下降侧转动,可能导致传感器主体部损坏。然而,根据本结构,能够通过限制部限制接触部超过界限点进一步向下降侧转动,因此,之后,当升降部上升时,检测臂能够适当地向上升侧摆动。
13.在本实用新型中,作为优选,所述传感器主体部经由支承部件支承在所述纵搬运部,所述限制部支承在所述支承部件。
14.根据该结构,通过有效利用支承传感器主体部的支承部件来支承限制部,因此,不需要采用专门的支承机构,就能够通过简易的结构设置限制部。
15.在本实用新型中,作为优选,在所述支承部件和所述升降部件之间具有所述检测臂和所述限制部。
16.根据该结构,能够利用支承部件和升降部件之间的空间紧凑地设置检测臂和限制部。
17.在本实用新型中,作为优选,所述升降部件以能够绕与所述检测臂的转动轴心平行的轴心上下摆动的方式支承在所述纵搬运部,所述限制部由从所述支承部件起沿着与所述检测臂的转动轴心平行的方向延伸的轴状部件构成。
18.根据该结构,升降部件的摆动动作以及检测臂随之进行的转动动作绕平行的轴心进行,因此,通过接触而进行的连动操作能够在不会产生扭曲等的状态下顺利地进行。并且,构成限制部的轴状部件沿着与检测臂的转动轴心平行的方向延伸,因此,当抵接限制检测臂时,能够在不会产生以倾斜的姿势抵接而导致扭曲等的不利的状态下进行限制。
附图说明
19.图1是联合收割机的整体侧视图。
20.图2是谷粒排出装置的中继搬运部附近的俯视图。
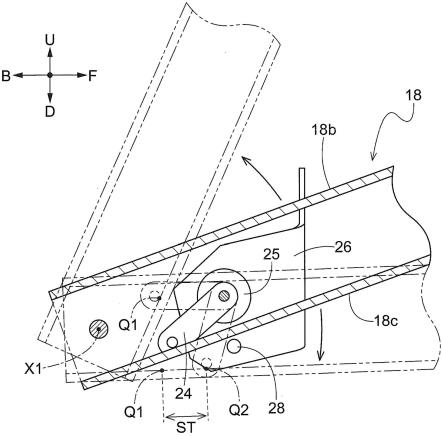
21.图3是上下位置传感器附近的主视图。
22.图4是上下位置传感器附近的纵剖侧视图。
23.图5是上下位置传感器的动作说明图。
24.附图标记说明
25.5:谷粒箱
26.6:谷粒排出装置
27.9:纵搬运部
28.10:横搬运部
29.11:谷粒排出口
30.18:升降部件
31.23:上下位置传感器
32.24:检测臂
33.25:传感器主体部
34.26:支承支架(支承部件)
35.28:限制部件(限制部)
36.x1、x2:轴心
37.q1:第一位置
38.q2:第二位置
39.q3:界限点
40.st:行程面
41.w:虚拟圆。
具体实施方式
42.下面,根据附图对作为本实用新型的收割机的一个例子的联合收割机的实施方式进行说明。在以下说明中,箭头“f”的方向为机体前侧,箭头“b”的方向为机体后侧,箭头“u”的方向为上侧,箭头“d”的方向为下侧,箭头“r”的方向为右侧,箭头“l”的方向为左侧。
43.(联合收割机的整体结构)
44.如图1所示,通过履带式行驶装置2支承机体1,驾驶部3设置于机体1的前部的右部。脱粒装置4设置于机体1的后部的左部,谷粒箱5和谷粒排出装置6设置于机体1的后部的右部。进料器7连结在脱粒装置4的前部并向前侧延伸,收割部8连结在进料器7的前部。
45.随着机体1的行进,农田的作物被导入收割部8进行收割,作物经过进料器7搬运并提供至脱粒装置4,在脱粒装置4中进行脱粒处理。在脱粒装置4中进行脱粒处理并回收的谷粒存储在谷粒箱5。谷粒箱5内的谷粒能够通过谷粒排出装置6排出外部。
46.(谷粒排出装置的结构)
47.谷粒排出装置6具有:纵搬运部9,连接在谷粒箱5的下部并沿着上下方向配置;以及横搬运部10,以能够绕作为水平轴心的沿着水平方向的第一轴心x1上下摆动的方式连结在纵搬运部9的上部。谷粒排出装置6能够从设置于横搬运部10的末端部的谷粒排出口11排出谷粒箱5的谷粒。在纵搬运部9和横搬运部10之间具有中继搬运部12。
48.在谷粒箱5的后部的下部连结有支承箱13。纵搬运部9以能够绕纵轴心转动的方式支承在支承箱13。纵搬运部9的上下方向的中间部通过多个支承部件以能够转动的方式受到支承。在支承箱13设置有能够对纵搬运部9以绕纵轴心y1的方式进行转动操作的电动马达14。通过电动马达14对纵搬运部9以绕纵轴心y1的方式进行旋转驱动,由此,谷粒排出装置6的整体,即纵搬运部9、中继搬运部12以及横搬运部10受到一体旋转的操作。
49.如图2所示,中继搬运部12具有:第一中继部16,连接在纵搬运部9的上端部;第二中继部17,连接在横搬运部10的起始端部。第一中继部16和第二中继部17能够绕第一轴心x1相对转动。第一中继部16和第二中继部17的外周部分别由肘形管构成,第一中继部16的一端部和第二中继部17的一端部以能够绕第一轴心x1转动的方式连接。
50.升降部件18以能够绕第一轴心x1摆动的方式支承在第一中继部16的前部侧的套筒部16a。如图3所示,升降部件18形成为截面呈槽形的形状,具有:纵面部18a,沿着上下方向;上表面部18b,从纵面部18a的上部向朝着横搬运部10的横向延伸;以及下表面部18c,从纵面部18a的下部向朝着横搬运部10的横向延伸。升降部件18的长边方向上的一端部支承在套筒部16a。
51.如图2所示,托架19连结在横搬运部10。圆棒状连结部件20横跨升降部件18的另一端部和托架19连结。并且,横搬运部10、第二中继部17、升降部件18以及连结部件20能够一体地绕第一轴心x1上下摆动。
52.横搬运部10能够通过作为升降缸的液压缸21的驱动而绕第一轴心x1摆动升降。支承托架22连结在第一中继部16的横搬运部10侧的端部。液压缸21的一端部以能够绕水平轴心相对转动的方式连结在支承托架22。液压缸21的另一端部连结在连结部件20。
53.连结部件20以插通液压缸21的另一端部的状态连接,液压缸21和连结部件20以能够绕连结部件20的外周部相对转动的方式连结。通过使液压缸21伸长,能够经由连结部件20使横搬运部10绕第一轴心x1摆动。
54.因此,谷粒排出装置6的整体能够绕纵轴心y1旋转,横搬运部10能够绕第一轴心x1上下摆动。由此,能够变更调整向机体外部排出谷粒的位置。
55.(横搬运部的上下摆动位置的检测结构)
56.具有检测横搬运部10的上下摆动位置的电位计型上下位置传感器23。上下位置传感器23具有:检测臂24,与随着横搬运部10的上下摆动而上下移动的升降部件18接触并转动;以及传感器主体部25,检测检测臂24的转动角度。
57.如图2所示,在第一中继部16的连结部件侧的部分连结有作为支承部件的支承支架26,支承支架26朝向升降部件18延伸。上下位置传感器23的传感器主体部25安装在支承支架26。即,传感器主体部25经由支承支架26和第一中继部16支承在纵搬运部9。
58.上下位置传感器23的检测轴23a以从支承支架26向升降部件18凸出的方式设置,检测轴23a能够绕沿着与第一轴心x1平行的水平方向的第二轴心x2跨整个圆周进行正转和逆转。
59.检测臂24连结在检测轴23a,并从检测轴23a向径向外方延伸。在检测臂24的摆动侧端部连结有圆棒状的销27(相当于接触部)。销27配置在升降部件18的上表面部18b和下表面部18c之间(参照图3)。
60.通过设置于传感器主体部25的内部的施力弹簧(未图示)对检测轴23a向图4的逆时针方向施力。由此,以使检测臂24的销27接触升降部件18的下表面部18c的上表面的方式对检测臂24的销27向下方施力,检测臂24呈连接于升降部件18的状态。因此,检测臂24追随升降部件18进行上下摆动,从而通过上下位置传感器23检测升降部件18的位置(上下角度),即横搬运部10的上下摆动位置。
61.上下位置传感器23在跨升降部件18的第一位置q1(参照图4)和升降部件18的第二
位置q2(参照图4)的行程面st的范围内使检测臂24接触升降部件18,第一位置q1为当升降部件18处于最大上升位置时检测臂24的销27接触升降部件18的位置,第二位置q2为当升降部件18处于最大下降位置时检测臂24的销27接触升降部件18的位置。图4的升降部件18的上下方向的中间位置为与横搬运部10收纳在机体上部的收纳位置相对应的位置。
62.检测臂24能够绕第二轴心x2跨整个圆周进行正转和逆转,因此,检测臂24能够转动至比销27接触升降部件18的第二位置q2的状态更靠下降侧的位置。
63.还具有作为限制部的限制部件28,即使升降部件18向比最大下降位置更靠下降侧的位置移动,限制部件28也能够阻止检测臂24转动至不能返回行程面st的不能返回位置。限制部件28由从支承支架26起沿着与检测臂24的转动轴心(第二轴心x2)平行的方向延伸的轴状部件构成。如图3所示,以位于支承支架26和升降部件18之间的位置的状态具有检测臂24和限制部件28。
64.限制部件28在检测臂24位于比界限点更靠上升侧的位置的状态下限制检测臂24向下降侧转动,所述界限点为相对于包含检测臂24的销27的转动轨迹的虚拟圆w而言行程面st作为切线的点。即,如图5所示,限制部件28位于与相对于包含销27的转动轨迹的虚拟圆w而言行程面st即升降部件18的下表面部18c的内表面作为切线的界限点q3(参照图5)相比更靠上升侧的位置。
65.图5的比界限点q3更靠右侧(下降侧)的区域对应于检测臂24不能返回行程面st的不能返回位置。通过设置限制部件28,不会使检测臂24的销27转动至不能返回位置,因此,检测臂24仅在行程面st的范围内与升降部件18接触。
66.(其他实施方式)
67.下面列举其他实施方式。
68.传感器主体部25也可以支承在除支承支架26以外设置的支承部件。
69.升降部件18的转动轴心和检测臂24的转动轴心也可以不平行,而是以稍微倾斜的状态设置。
70.作为限制部件28也可以以将板体弯折成l形的结构、采用中空状的部件的结构、代替圆棒而采用截面为矩形的部件等各种方式来实施。
71.限制部件28也可以设置在与所述界限点q3相同的位置。
72.作为升降缸,也可以代替液压缸而采用电动缸。
73.(产业上的可利用性)
74.本实用新型能够适用于联合收割机、玉米收割机等收割机。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
