技术特征:
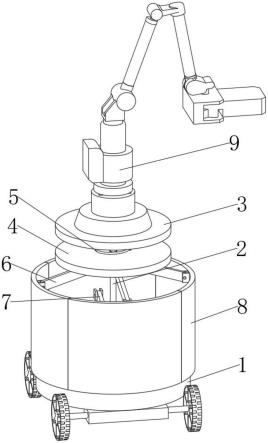
1.一种高工作效率的工业防撞机器人,包括智能小车(1),其特征在于:所述智能小车(1)上端中部安装有中心柱(2),所述中心柱(2)上端安装有托盘(3),所述托盘(3)上端安装有机器人主体(9),所述中心柱(2)外表面活动套接有活动盘(4),所述活动盘(4)和托盘(3)之间共同安装有复位弹簧(5),所述活动盘(4)下端设置有第一支撑组件(6),所述中心柱(2)外表面下部设置有两个第二支撑组件(7),两个所述第二支撑组件(7)呈平行设置,所述第一支撑组件(6)和第二支撑组件(7)共同传动连接有四个防护板(8),四个所述防护板(8)以中心柱(2)为中心呈环形阵列分布。2.根据权利要求1所述的一种高工作效率的工业防撞机器人,其特征在于:所述托盘(3)下端安装有红外位移传感器(11),所述红外位移传感器(11)与智能小车(1)电性连接。3.根据权利要求2所述的一种高工作效率的工业防撞机器人,其特征在于:所述第一支撑组件(6)包括活动套管(21),所述活动套管(21)与中心柱(2)穿插活动连接,所述活动套管(21)上端与活动盘(4)下端固定连接,所述活动套管(21)外表面活动连接有四个第一支撑杆(22),四个所述第一支撑杆(22)远离活动套管(21)的一端均活动连接有第一安装架(23),四个所述第一安装架(23)分别与四个防护板(8)内侧弧面固定连接。4.根据权利要求3所述的一种高工作效率的工业防撞机器人,其特征在于:所述第二支撑组件(7)包括固定套管(31),所述固定套管(31)与中心柱(2)穿插固定连接,所述固定套管(31)外表面活动连接有四个第二支撑杆(32),四个所述第二支撑杆(32)远离固定套管(31)的一端均活动连接有第二安装架(33),四个所述第二安装架(33)分别与四个防护板(8)内侧弧面固定连接。5.根据权利要求4所述的一种高工作效率的工业防撞机器人,其特征在于:四个所述第二安装架(33)分别位于四个第一安装架(23)正下方。6.根据权利要求5所述的一种高工作效率的工业防撞机器人,其特征在于:所述第一支撑杆(22)的长度等于第二支撑杆(32)的长度,所述第一支撑杆(22)与第二支撑杆(32)呈上下对称设置。7.根据权利要求5所述的一种高工作效率的工业防撞机器人,其特征在于:所述复位弹簧(5)套接在中心柱(2)外表面。8.根据权利要求5所述的一种高工作效率的工业防撞机器人,其特征在于:四个所述防护板(8)共同围成一个圆管形结构。
技术总结
本实用新型公开了一种高工作效率的工业防撞机器人,包括智能小车,所述智能小车上端中部安装有中心柱,所述中心柱上端安装有托盘,所述托盘上端安装有机器人主体,所述中心柱外表面活动套接有活动盘,所述活动盘和托盘之间共同安装有复位弹簧,所述活动盘下端设置有第一支撑组件,所述中心柱外表面下部设置有两个第二支撑组件,两个所述第二支撑组件呈平行设置,所述第一支撑组件和第二支撑组件共同传动连接有四个防护板,四个所述防护板以中心柱为中心呈环形阵列分布。本实用新型通过设置中心柱、活动盘、复位弹簧、红外位移传感器、第一支撑组件、第二支撑组件和防护板共同配合实现防撞功能,提高了工作效率,结构紧凑,实用性强。强。强。
技术研发人员:蒲东清 黄超
受保护的技术使用者:四川拓格机器人科技有限公司
技术研发日:2022.03.05
技术公布日:2022/8/23
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。