1.本实用新型属于垃圾桶技术领域,具体涉及一种减少空气污染的腿部感应垃圾桶。
背景技术:
2.垃圾桶,又名废物箱或垃圾箱,是指装放垃圾的容器。多数以金属或塑胶制,用时放入塑料袋,当垃圾一多便可扎起袋丢掉。垃圾桶是人们生活中“藏污纳垢”的容器,也是社会文化的一种折射,多数垃圾桶都有盖以防垃圾的异味四散,有些垃圾桶可以以脚踏开启,家居的垃圾桶多数放于厨房,以便放置厨余。
3.目前,现有的垃圾桶上大多装置有用于密封的盖子,每次在丢垃圾的过程中都需要用手触摸盖子才能打开垃圾桶,从而在倒垃圾的过程中易导致手部受到污染。
4.并且,众所周知,感应垃圾桶考虑到易用性,在垃圾桶的上方即由于在盖子近旁设置传感器,当手要被传感器感知时,必须将手靠近作为垃圾口的盖子附近直到传感器检测到,由于盖子打开的动作,被从垃圾桶内卷起的空气(悬浮颗粒)附着的危险性很高。
5.特别是在医疗机关的废弃物,由于附着各种流感、感染性细菌、血液以及危险药剂的风险很高,因此针对医疗机关设置的垃圾桶的垃圾废弃,必须注意不要用手接触容器和袋子等。因此,为了避免接触各种流感和细菌的风险,并不让其间接扩散,做到安全废弃,需要感应垃圾桶。
技术实现要素:
6.本实用新型的目的在于提供一种减少空气污染的腿部感应垃圾桶,以解决上述背景技术中提出的问题。
7.为实现上述目的,本实用新型提供如下技术方案:一种减少空气污染的腿部感应垃圾桶,包括垃圾桶主体以及构成垃圾桶主体的容器本体和覆盖在容器本体上方开口的盖子,上述容器本体包括桶身以及固定在桶身底端的底座,上述盖子的顶端安装有密封盖,且盖子上固定有用于驱动密封盖的驱动装置,上述底座上安装有用于控制驱动装置启动的传感器,其中盖子的侧壁固定有用于切换传感器的转换开关。
8.进一步的,上述传感器为固定在底座侧壁的外部传感器,上述外部传感器通过控制电路板与驱动装置电性连接。
9.进一步的,上述底座的底端面中心位置处开设有底部凹槽,上述传感器为固定在凹槽内壁的内部传感器,上述内部传感器通过控制电路板与驱动装置电性连接。
10.进一步的,上述密封盖包括对称设置的第一盖片和第二盖片,上述第一盖片滑动套接在第二盖片上。
11.进一步的,上述底座中内嵌安装有控制电路板,上述驱动装置的顶端安装有与控制电路板电性连接的手动开关。
12.进一步的,上述桶身内装置有垃圾袋,且桶身的内壁顶端固定有翻盖板,上述翻盖
板中内嵌卡接有用于固定垃圾袋的压袋圈。
13.该减少空气污染的腿部感应垃圾桶的技术效果和优点:仅可以收纳纸屑等垃圾,并且在丢弃卫生处理品如使用完的口罩和消毒湿巾等废弃物时,不需要用手接触盖子就能自动开闭垃圾桶;此外,该垃圾桶还可以作为在卫生间、洗手池和粉尘室等单独空间中设有的被称为卫生(污物)箱的废弃收集容器,并且降低了暴露于内部空气(悬浮颗粒)中的危险性,操作打开垃圾桶时,不需要用双手,不需要弯腰,用腿部脚部感应就能完成操作的垃圾桶,提升了垃圾桶使用的安全性和便捷性。
附图说明
14.图1为本实用新型实施例的结构示意图;
15.图2为本实用新型实施例的拆分结构示意图;
16.图3为本实用新型实施例的后视图;
17.图4为本实用新型实施例的左视图;
18.图5为本实用新型实施例的仰视图;
19.图6为本实用新型实施例的俯视结构示意图;
20.图7为本实用新型实施例的内部结构示意图;
21.图8为本实用新型实施例的压袋圈结构示意图
22.图9为本实用新型实施例的安装结构示意图;
23.图10为本实用新型实施例的封装结构示意图。
24.图中:1、容器本体;10、垃圾桶主体;11、桶身;12、底座;2、盖子;20、密封盖片;21、第一盖片;22、第二盖片;3、驱动装置;30、底部凹槽;31、控制电路板;4、外部传感器;5、内部传感器;6、手动开关;7、转换开关;8、翻盖板;9、压袋圈。
具体实施方式
25.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。
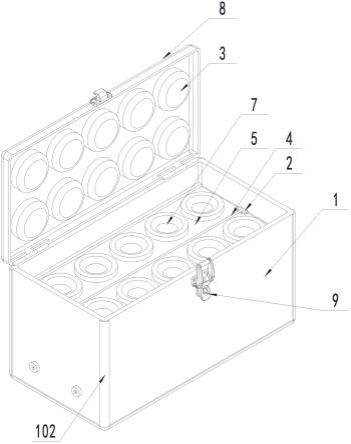
26.请参阅如图1-图10所示的一种减少空气污染的腿部感应垃圾桶,包括垃圾桶主体10以及构成垃圾桶主体10的容器本体1和覆盖在容器本体1上方开口的盖子2,容器本体1包括桶身11以及固定在桶身11底端的底座12,盖子2的顶端安装有密封盖,且盖子2上固定有用于驱动密封盖的驱动装置3,底座12上安装有用于控制驱动装置3启动的传感器,其中盖子2的侧壁固定有用于切换传感器的转换开关7,传感器为固定在底座12侧壁的外部传感器4和固定在底座12底端面中心位置凹槽内壁的内部传感器5,外部传感器4和内部传感器5与驱动装置3电性连接。
27.如图1所示,在本实施例中的垃圾桶10通过可相互拆卸的容器主体1和盖子2的组合而构成。也就是说,盖子2覆盖在容器主体1(盖子2的下边缘装配在容器主体1的上开口中,以便放置在容器主体1的上边缘)。因此在丢弃垃圾时,盖子2可以根据需要更为容易地从容器主体1移开和组合。
28.如图1和图2所示,容器本体1包括桶身11和底座12。在图中,容器本体1在平面图中
大致呈半圆形,这是考虑了盖子2所具有的可移动盖片20的开闭动作。
29.桶身11是用于丢弃废纸、使用完的口罩、除菌片等垃圾的收纳区域,根据用途、外观设置垃圾桶10的内部面积大小。
30.虽然可以直接将垃圾丢弃到桶身11中,但是为了在丢弃垃圾后能够更有效率地回收,最好在桶身11中放置垃圾袋g。因此,在本实施例中,容器主体1包括压袋圈9,其能够有效地放置垃圾袋g。压袋圈9是保持垃圾袋g的开口状态的支撑部件,它是能够缠绕垃圾袋g的开口的环形构件。
31.压袋圈9可拆卸地布置在桶身11的开口边缘部稍微下降的位置内侧。垃圾袋g的开口部分可以套在桶身11的开口边缘部分上,但是这样的话,垃圾袋g的开口部分暴露在桶身11的外侧,不美观。本实施例中所示,使用压袋圈9支撑垃圾袋g的开口,将垃圾袋g的开口由内向外缠绕在压袋圈9上,垃圾袋g的开口不会暴露在桶身11的外侧。
32.底座12用于布置各种收纳零件的场所,其中有部分向内凹入形成底部凹槽30。
33.底座12设置了开闭盖子2时的非接触开关(外部传感器4和内部传感器5)和以外部传感器4和内部传感器5发出的电子信号为依据,向驱动装置3发出用于打开或关闭盖子2指令的控制电路板31。
34.外部传感器4和内部传感器5是无需接触就能识别盖子2开盖请求的开盖请求接收装置。像这的非接触开关,只需要一边靠近一边将手脚放在上面就够感应,在卫生方面具有优势,是可以帮助减轻流感和细菌感染风险的开关。
35.外部传感器4是向控制电路板31输出有物体接近信号,让盖子2的电动马达开始驱动的控制装置。在本实施例中,外部传感器4在底座12外侧,设置在底部凹槽30的入口旁。如图4所示,外部传感器4是在容器本体1的正面下方,其检测方向朝向外侧(即如图中虚线箭头所示,使用者靠近的方向)。
36.外部传感器5是向控制电路板31输出有物体接近信号,让盖子2的电动马达开始驱动的控制装置。外部传感器5隐藏底部凹槽30内部。如图5所示,外部传感器5处于容器本体1的正中央底部凹槽30的内部,其检测方向为相对的方式,在正面观察,左右侧面分别设置外部传感器5(即如图中的虚线箭头所示,以检测方向相对的方式设置成一对)。
37.从外部传感器4或外部传感器5输出的检测信号,由控制电路板31接收,对驱动装置3下达让电动马达正旋转打开盖子2(可移动盖片20)的指示。此外,外部传感器4或内部传感器5如果在一定的时间没有感知物体,检测信号将不会被输出,控制电路板31会对驱动装置3下达让马达逆旋转自动关闭盖子2(可移动盖片20)的指示。
38.此类传感器是不需要接触检测对象就能检测的人体感知传感器(人感传感器)。例如像,通过一般红外线检测的红外线传感器、通过超音波检测的超音波传感器等近接触传感器。物体反射型(扩散反射型)光电传感器、透过型或回归反射(镜子)型光电传感器等。
39.使用者在使用垃圾桶丢弃垃圾时,将脚插入容器本体1下方设置的底部凹槽30的内部,识别(检测)到其接近容器本体1,使用者不需要直接接触盖子2就能够自动进行开闭盖子2的操作。
40.如图3所示,内部传感器4和外部传感器5,可通过容器本体1背面的转换开关7的档位选择,来设定传感器识别动作的转换。即根据传感器4来实行盖子2的开盖要求的识别或是根据传感器5来实行盖子2的开盖要求的识别,通过转换开关7的转换都能够自由的选择。
41.当选择外部传感器4时,使用者能够通过靠近垃圾桶10自动开盖。另一方面,当小朋友和宠物有无目的接近垃圾桶10的风险时,则选择内部传感器5,能够设置成即使接近垃圾桶10也不随意开盖。在丢弃垃圾时,通过把脚插入底部凹槽30内部,盖子将自动打开。
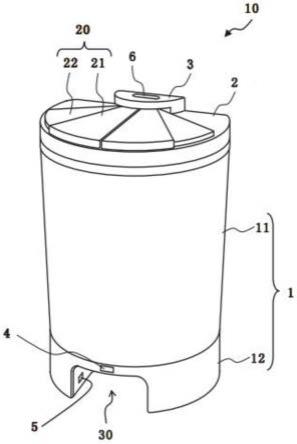
42.盖子2是覆盖在容器本体1上方开口区域的部件,盖子2处设置有丢弃垃圾开口区域自由开闭的可移动盖片20。可移动盖片20,沿着容器本体1的上端开口水平方向开闭。盖子2为了让可移动盖片20自动开闭的功能,设有驱动装置3。
43.驱动装置3通过识别外部传感器4和内部传感器5的开盖请求,驱动可移动盖片20打开盖子2,即驱动装置3以外部传感器4或内部传感器5发的电子信号为依据,让可移动盖片20自动移动。
44.可移动盖片20覆盖在盖子2的丢弃垃圾开口区域,使其自由开闭的部件。可以由一个部件构成,也可以由多个部件构成。可移动盖片20可从中央向左右打开,且能够从左右向中央关闭,一组(两个)的可移动盖片20采用双开门(拉门)结构。像这样的双开门,是当一组可移动盖片20被打开和关闭时,可移动盖片20的移动距离较少(只需一半),并且能够在短时间内执行打开和关闭操作。
45.作为具有双开门结构的开盖部件,是由两组可移动盖片20和多个盖片构成的联动拉门结构。在本实施形态中,连动拉门结构是指,可移动盖片20由上下重叠的多个盖片构成,在维持多个盖片之间的重叠状态的情况下移动。
46.在本实施例中,一组可移动盖片都是由相互上下重叠的两个盖片构成。如图6所示,一组可移动盖片20是分别由位于上方的第一可移动盖片21和位于下方的第二可移动盖片22构成的联动拉门结构。
47.如图6中的一点划线箭头所示,像这样的联动拉门结构在开盖时,首先是由一组可移动盖片21开始移动,直到与第二可移动盖片22重叠后打开。如图6中的二点划线箭头所示,第一可移动盖片21和第二可移动盖片22继续移动并保持重叠状态,直到最后打开,如图6所示。
48.另一方面,闭盖时与上述图示的开盖动作相反,即第一可动盖片21和第二可动盖片22关闭到半中途的同时,保持重叠状态(与第二可动盖片22的宽度相同)。紧接着,为了解除与第二可移动盖片22的重叠状态,单靠第一可移动盖片21移动就能完全关闭。
49.并且,一组可移动盖片20的闭盖时间的是提前设定的。例如,控制电路板31在五秒内完成对外部传感器4或内部传感器5的开盖请求的识别后关闭。
50.这样的可移动盖片20是由各上下重叠的多个盖片构成的联动拉门结构,当可移动盖片20打开时,多个可动盖片彼此重叠,从而使可移动盖片20变得紧凑,并且打开的可移动盖片20范围不超过盖子2的上表面区域。
51.盖子2设有手动开关6。该手动开关6,不需要识别对外部传感器4或内部传感器5开盖请求,而是自动识别(检测)让可移动盖片20打开的开盖请求接收装置,即在选择外部传感器4时,靠近其无法检测的方向(例如侧面和背面)的情况下,按压手动开关6,盖子将自动让可移动盖片20移动开盖。在选择内部传感器5时,无法将脚插入在容器本体1设置的底部凹槽30的内部时(例如脚受伤、坐在轮椅上等情况),按压手动开关6,盖子将自动让可移动盖片20移动开盖。因此,本发明的垃圾桶10,通过有效率地使用手动开关6和转换开关7,不会因丢弃垃圾和使用者的状态而受到限制。
52.如上所述构成的垃圾桶10准备如下使用。
53.首先,将覆盖在容器本体1上方开口的盖子取下,在收纳部中放置垃圾袋g,垃圾袋的设置g如图7至图10所示。
54.其次,如图8所示,将垃圾袋g的开口缠绕在压袋圈9上。
55.紧接着,如图9所示,将缠有垃圾袋g的压袋圈9放置进桶身11中,将朝上的翻盖板8放倒以使其处于原始状态。
56.接下来,如图10所示,将盖子2盖在容器本体1上,垃圾桶10的使用准备完成。
57.通过滑动转换开关7的档位,来选择外部传感器4或内部传感器5的工作状态。
58.在选择外部传感器4的情况下,使用者在丢弃垃圾时靠近垃圾桶10设定的距离范围内,外部传感器4检测到人的存在,设在盖子2上的可移动盖片20沿着容器本体1上方开口的水平方向自动打开。
59.此时,可移动盖片20由于不执行从覆盖容器本体1的上方开口反转的起立动作,因此随着可移动盖片20的打开,收纳部内的空气上扬的风险将会被明显抑制住。
60.在选择内部传感器5的情况下,即使小朋友和宠物无目的性地接近垃圾桶10设定的距离范围内,也不会反应(无法识别开盖请求)。因此,使用者在丢弃垃圾时接近垃圾桶10,要将脚插入容器本体底部设置的底部凹槽30内部,内部传感器5检测(识别到开盖请求)到人的存在,自动将盖子2的可移动盖片20打开。
61.在使用本垃圾桶10丢弃垃圾时,不需要将手放在盖子上或是弯腰到传感器检测的位置,就能够自动开盖。因此,在没有接触到污物的风险的同时,也能够减轻了被内部空气附着细菌侵害的危险性。
62.并且,即使两手不方便,但只要靠近垃圾桶10或将脚插入底部凹槽30,依靠极其简单的动作就能自动开盖,其便利性非常优越。
63.以上所述,仅为实用新型较佳的具体实施方式,但实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在实用新型揭露的技术范围内,根据实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。