1.本发明涉及定位领域,尤其涉及一种展示设备转向方法、设备及计算机可读存储介质。
背景技术:
2.目前,市面上的电视基本都不具备转向功能,且电视的固定方式都是采用嵌入式或者站立式的设计,电视位置一经确定,基本就不会再移动。特别是电视尺寸、重量日益增长的今天,更是如是。固定的电视观看位置,将会给不同位置的观看者带来不便。非正对电视的人,观看电视时的视觉体验将会比正对电视的人的体验效果差。特别是当存在多人观看时,难以确定最佳的观看角度,以满足所有观看者的观看需求。而且除开电视,目前的展示设备几乎都存在与电视相同的观看问题。
技术实现要素:
3.本发明的主要目的在于提供一种展示设备转向方法,旨在解决现有技术中难以确定并提供展示设备的最佳观看角度的技术问题。
4.为实现上述目的,本发明提供一种展示设备转向方法,所述展示设备转向方法应用于转向装置,所述转向装置包括麦克风阵列以及转向模组,所述转向模组用于调整所述展示设备的展示区域的朝向,所述麦克风阵列参照所述展示设备的放置位置进行设置,所述展示设备转向方法包括以下步骤:
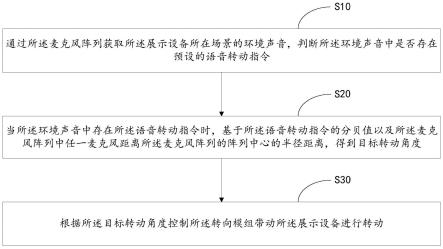
5.通过所述麦克风阵列获取所述展示设备所在场景的环境声音,判断所述环境声音中是否存在预设的语音转动指令;
6.当所述环境声音中存在所述语音转动指令时,基于所述语音转动指令的分贝值以及所述麦克风阵列中任一麦克风距离所述麦克风阵列的阵列中心的半径距离,得到目标转动角度;
7.根据所述目标转动角度控制所述转向模组带动所述展示设备进行转动。
8.可选的,所述麦克风阵列包括第一麦克风、第二麦克风、第三麦克风和第四麦克风,所述麦克风阵列中的麦克风均匀分布于同一水平面且以所述转向装置的几何中心为所述阵列中心,
9.所述基于所述语音转动指令的分贝值以及所述麦克风阵列中任一麦克风距离所述麦克风阵列的阵列中心的半径距离,得到目标转动角度的步骤,包括:
10.分别获取所述第一麦克风、所述第二麦克风、所述第三麦克风和所述第四麦克风接收到所述语音转动指令的第一分贝值、第二分贝值、第三分贝值和第四分贝值;
11.基于所述第一分贝值、所述第二分贝值、所述第三分贝值和所述第四分贝值确定发出所述语音转动指令的声源与所述第一麦克风、所述第二麦克风、所述第三麦克风和所述第四麦克风的第一距离、第二距离、第三距离和第四距离;
12.基于所述第一距离、所述第二距离、所述第三距离和所述第四距离,以及所述半径
距离计算得到所述目标转动角度。
13.可选地,所述基于所述第一距离、所述第二距离、所述第三距离和所述第四距离,以及所述半径距离计算得到所述目标转动角度的步骤,包括:
14.基于所述第三距离和所述第四距离确定所述声源距离所述阵列中心的垂直距离,所述垂直距离包括与所述第一麦克风同侧的第一垂直距离和与所述第二麦克风同侧的第二垂直距离;
15.基于所述第一距离和所述第二距离的大小关系在所述第一垂直距离和所述第二垂直距离中确定得到目标距离,并基于所述第三距离和所述第四距离的大小关系在所述第三距离和所述第四距离中确定得到短边距离;
16.基于所述目标距离,所述短边距离以及所述半径距离计算得到所述目标转动角度。
17.可选地,所述基于所述第一距离和所述第二距离的大小关系在所述第一垂直距离和所述第二垂直距离中确定得到目标距离的步骤,包括:
18.若第一距离大于所述第二距离,则以所述第二垂直距离作为所述目标距离;
19.若第一距离小于所述第二距离,则以所述第一垂直距离作为所述目标距离。
20.可选地,所述基于所述第三距离和所述第四距离的大小关系在所述第三距离和所述第四距离中确定得到短边距离的步骤,包括:
21.若第三距离大于所述第四距离,则以所述第四距离作为所述短边距离;
22.若第三距离小于所述第四距离,则以所述第三距离作为所述短边距离。
23.可选地,所述基于所述目标距离,所述短边距离以及所述半径距离计算得到所述目标转动角度的步骤,包括:
24.基于所述目标距离,所述短边距离以及所述半径距离计算得到初始角度,以所述初始角度的余角作为所述目标转动角度。
25.可选地,所述展示设备转向方法,还包括:
26.若在预设接收时间内从所述环境声音中检测到多个所述语音转动指令,则获取多个所述语音转动指令对应的所述初始角度;
27.基于多个所述语音转动指令对应的所有所述初始角度确定得到目标初始角度,基于所述目标初始角度确定得到所述目标转动角度。
28.可选地,所述转向装置还包括转向位置比较器,在所述根据所述目标转动角度控制所述转向模组带动所述展示设备进行转动的步骤之后,还包括:
29.获取所述转向电机的实时角度,通过所述转向位置比较器比较所述实时角度与所述目标转动角度;
30.当所述实时角度与所述目标转动角度相同时,停止转动所述展示设备。
31.此外,为实现上述目的,本发明还提供一种转向设备,所述转向设备包括:转向装置、存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序配置为实现如上所述的展示设备转向方法的步骤。
32.此外,为实现上述目的,本发明还提供一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如上所述的展示设备转向方法的步骤。
33.本发明实施例提出的一种展示设备转向方法、设备及计算机可读存储介质,所述展示设备转向方法应用于转向装置,所述转向装置包括麦克风阵列以及转向模组,所述转向模组用于调整所述展示设备的展示区域的朝向,所述麦克风阵列参照所述展示设备的放置位置进行设置,所述展示设备转向方法包括以下步骤:通过所述麦克风阵列获取所述展示设备所在场景的环境声音,判断所述环境声音中是否存在预设的语音转动指令;当所述环境声音中存在所述语音转动指令时,基于所述语音转动指令的分贝值以及所述麦克风阵列中任一麦克风距离所述麦克风阵列的阵列中心的半径距离,得到目标转动角度;根据所述目标转动角度控制所述转向模组带动所述展示设备进行转动。相较于目前展示设备固定的展示角度,以正对观看者作为最佳观看角度,确定并提供展示设备的最佳观看角度,无需观看者的移动,通过转动展示设备提供最佳的观看体验。
附图说明
34.图1是本发明实施例方案涉及的硬件运行环境的运行设备的结构示意图;
35.图2为本发明一种展示设备转向方法一实施例的流程示意图;
36.图3为本发明一种展示设备转向方法一实施例的应用场景示意图;
37.图4为本发明一种展示设备转向方法一实施例的数据流向的场景示意图;
38.图5为本发明一种展示设备转向方法一实施例的几何关系示意图;
39.图6为本发明一种展示设备转向方法一实施例的确定声源位置示意图。
40.本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
41.应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
42.参照图1,图1为本发明实施例方案涉及的硬件运行环境的运行设备的结构示意图。
43.如图1所示,该运行设备可以包括:处理器1001,例如中央处理器(central processing unit,cpu),通信总线1002、用户接口1003,网络接口1004,存储器1005。其中,通信总线1002用于实现这些组件之间的连接通信。用户接口1003可以包括显示屏(display)、输入单元比如键盘(keyboard),可选用户接口1003还可以包括标准的有线接口、无线接口。网络接口1004可选的可以包括标准的有线接口、无线接口(如无线保真(wireless-fidelity,wi-fi)接口)。存储器1005可以是高速的随机存取存储器(random access memory,ram)存储器,也可以是稳定的非易失性存储器(non-volatile memory,nvm),例如磁盘存储器。存储器1005可选的还可以是独立于前述处理器1001的存储装置。
44.本领域技术人员可以理解,图1中示出的结构并不构成对运行设备的限定,可以包括比图示更多或更少的部件,或者组合某些部件,或者不同的部件布置。
45.如图1所示,作为一种存储介质的存储器1005中可以包括操作系统、数据存储模块、网络通信模块、用户接口模块以及计算机程序。
46.在图1所示的运行设备中,网络接口1004主要用于与其他设备进行数据通信;用户接口1003主要用于与用户进行数据交互;本发明运行设备中的处理器1001、存储器1005可以设置在运行设备中,所述运行设备通过处理器1001调用存储器1005中存储的计算机程
序,并执行以下操作:
47.通过所述麦克风阵列获取所述展示设备所在场景的环境声音,判断所述环境声音中是否存在预设的语音转动指令;
48.当所述环境声音中存在所述语音转动指令时,基于所述语音转动指令的分贝值以及所述麦克风阵列中任一麦克风距离所述麦克风阵列的阵列中心的半径距离,得到目标转动角度;
49.根据所述目标转动角度控制所述转向模组带动所述展示设备进行转动。
50.进一步地,处理器1001可以调用存储器1005中存储的计算机程序,还执行以下操作:
51.所述基于所述语音转动指令的分贝值以及所述麦克风阵列中任一麦克风距离所述麦克风阵列的阵列中心的半径距离,得到目标转动角度的步骤,包括:
52.分别获取所述第一麦克风、所述第二麦克风、所述第三麦克风和所述第四麦克风接收到所述语音转动指令的第一分贝值、第二分贝值、第三分贝值和第四分贝值;
53.基于所述第一分贝值、所述第二分贝值、所述第三分贝值和所述第四分贝值确定发出所述语音转动指令的声源与所述第一麦克风、所述第二麦克风、所述第三麦克风和所述第四麦克风的第一距离、第二距离、第三距离和第四距离;
54.基于所述第一距离、所述第二距离、所述第三距离和所述第四距离,以及所述半径距离计算得到所述目标转动角度。
55.进一步地,处理器1001可以调用存储器1005中存储的计算机程序,还执行以下操作:
56.所述基于所述第一距离、所述第二距离、所述第三距离和所述第四距离,以及所述半径距离计算得到所述目标转动角度的步骤,包括:
57.基于所述第三距离和所述第四距离确定所述声源距离所述阵列中心的垂直距离,所述垂直距离包括与所述第一麦克风同侧的第一垂直距离和与所述第二麦克风同侧的第二垂直距离;
58.基于所述第一距离和所述第二距离的大小关系在所述第一垂直距离和所述第二垂直距离中确定得到目标距离,并基于所述第三距离和所述第四距离的大小关系在所述第三距离和所述第四距离中确定得到短边距离;
59.基于所述目标距离,所述短边距离以及所述半径距离计算得到所述目标转动角度。
60.进一步地,处理器1001可以调用存储器1005中存储的计算机程序,还执行以下操作:
61.所述基于所述第一距离和所述第二距离的大小关系在所述第一垂直距离和所述第二垂直距离中确定得到目标距离的步骤,包括:
62.若第一距离大于所述第二距离,则以所述第二垂直距离作为所述目标距离;
63.若第一距离小于所述第二距离,则以所述第一垂直距离作为所述目标距离。
64.进一步地,处理器1001可以调用存储器1005中存储的计算机程序,还执行以下操作:
65.所述基于所述第三距离和所述第四距离的大小关系在所述第三距离和所述第四
距离中确定得到短边距离的步骤,包括:
66.若第三距离大于所述第四距离,则以所述第四距离作为所述短边距离;
67.若第三距离小于所述第四距离,则以所述第三距离作为所述短边距离。
68.进一步地,处理器1001可以调用存储器1005中存储的计算机程序,还执行以下操作:
69.所述基于所述目标距离,所述短边距离以及所述半径距离计算得到所述目标转动角度的步骤,包括:
70.基于所述目标距离,所述短边距离以及所述半径距离计算得到初始角度,以所述初始角度的余角作为所述目标转动角度。
71.进一步地,处理器1001可以调用存储器1005中存储的计算机程序,还执行以下操作:
72.所述展示设备转向方法,还包括:
73.若在预设接收时间内从所述环境声音中检测到多个所述语音转动指令,则获取多个所述语音转动指令对应的所述初始角度;
74.基于多个所述语音转动指令对应的所有所述初始角度确定得到目标初始角度,基于所述目标初始角度确定得到所述目标转动角度。
75.进一步地,处理器1001可以调用存储器1005中存储的计算机程序,还执行以下操作:
76.在所述根据所述目标转动角度控制所述转向模组带动所述展示设备进行转动的步骤之后,还包括:
77.获取所述转向电机的实时角度,通过所述转向位置比较器比较所述实时角度与所述目标转动角度;
78.当所述实时角度与所述目标转动角度相同时,停止转动所述展示设备。
79.本发明实施例提供了一种转向方法,参照图2,图2为本发明一种展示设备转向方法第一实施例的流程示意图。
80.本实施例中,所述展示设备转向方法应用于转向装置,所述转向装置包括麦克风阵列以及转向模组,所述转向模组用于调整所述展示设备的展示区域的朝向,所述麦克风阵列参照所述展示设备的放置位置进行设置,所述展示设备转向方法包括:
81.步骤s10:通过所述麦克风阵列获取所述展示设备所在场景的环境声音,判断所述环境声音中是否存在预设的语音转动指令。
82.参照图3,图3为本发明一种展示设备转向方法一实施例的应用场景示意图。在本实施例中,以电视作为待转动物体、转动电视为例。当电视作为展示设备时,电视的底座内部集成了麦克风阵列,麦克风阵列中优选地布置有四颗高精度数字麦克风。在电视底座与屏幕连接的结构件内部集成了电视的转向模组。通过麦克风阵列获取环境声音,判断是否从环境声音中检测到语音转动指令,语音转动指令可以是电视观看者发出的唤醒指令,如“小维小维”。
83.参照图4,图4为本发明一种展示设备转向方法一实施例的数据流向的场景示意图。当电视观看者发出语音转动指令之后,该声源经过麦克风阵列的采集,将数据传输到dsp(digital signal processing,数字信号处理)模块中进行处理,dsp模块的主要作用是
将麦克风阵列传来声音信号处理转换成数字信号,然后将数字信号传给主控。主控将数字信号转换为转向装置的转向信号,转向装置根据该转向信号驱动转向模组,通过转向模组将电视屏幕转到一个合适的目标转动角度。
84.在麦克风阵列的采集环境声音中,不仅存在语音转动指令的声音信号,还包括主板控制喇叭发声的声音信号,主板同时也会把喇叭发出的声音信号传给dsp模块,人声和喇叭发声组成的声源都会传到麦克风阵列中。因此对环境声音需要判断是否包括语音转动指令,进而解析出发出语音转动指令的声源的位置。
85.步骤s20:当所述环境声音中存在所述语音转动指令时,基于所述语音转动指令的分贝值以及所述麦克风阵列中任一麦克风距离所述麦克风阵列的阵列中心的半径距离,得到目标转动角度。
86.步骤s30:根据所述目标转动角度控制所述转向模组带动所述展示设备进行转动。
87.其中,麦克风阵列中任一麦克风距离麦克风阵列的阵列中心的距离在图3中,表示为任一麦克风距离阵列中心、或者底座中心的距离,四个麦克风的距离几何中心的距离均相同,该距离在本实施例中为半径距离。由于使用高精度的数字麦克风,可以准确的通过分贝大小得到对应麦克风与声源的距离,分贝大则距离近,分贝小则距离远,分贝大小与距离的对应关系可以预先进行测试得到,具体得出对应关系的方式在此不做赘述。当从环境声音中检测到语音转动指令时,就可以根据分贝大小映射得到该分贝大小对应的麦克风与声源的距离,再读取预先存储的任一麦克风与几何中心的半径距离,基于分贝大小和半径距离即可计算得到目标转动角度。
88.在计算得到目标转动角度后,以目标转动角度驱动转向电机进行转动,将电视转动到正对电视观看者。
89.在本实施例中,通过所述麦克风阵列获取所述展示设备所在场景的环境声音,判断所述环境声音中是否存在预设的语音转动指令;当所述环境声音中存在所述语音转动指令时,基于所述语音转动指令的分贝值以及所述麦克风阵列中任一麦克风距离所述麦克风阵列的阵列中心的半径距离,得到目标转动角度;根据所述目标转动角度控制所述转向模组带动所述展示设备进行转动。通过检测到的语音转动指令的分贝大小得到与发出该指令的声源的声源距离,再读取预存的半径距离,以声源距离和半径距离计算出目标转动角度,以目标转动角度驱动转向电机将展示设备转动到正对着观看者,从而使观看者获得最佳的观看体验。相较于目前展示设备固定的展示角度,以正对观看者作为最佳观看角度,确定并提供展示设备的最佳观看角度,无需观看者的移动,通过转动展示设备提供最佳的观看体验。
90.可选地,所述麦克风阵列包括第一麦克风、第二麦克风、第三麦克风和第四麦克风,所述麦克风阵列中的麦克风均匀分布于同一水平面且以所述转向装置的几何中心为所述阵列中心,
91.所述基于所述语音转动指令的分贝值以及所述麦克风阵列中任一麦克风距离所述麦克风阵列的阵列中心的半径距离,得到目标转动角度的步骤,包括:
92.分别获取所述第一麦克风、所述第二麦克风、所述第三麦克风和所述第四麦克风接收到所述语音转动指令的第一分贝值、第二分贝值、第三分贝值和第四分贝值;
93.基于所述第一分贝值、所述第二分贝值、所述第三分贝值和所述第四分贝值确定
发出所述语音转动指令的声源与所述第一麦克风、所述第二麦克风、所述第三麦克风和所述第四麦克风的第一距离、第二距离、第三距离和第四距离;
94.基于所述第一距离、所述第二距离、所述第三距离和所述第四距离,以及所述半径距离计算得到所述目标转动角度。
95.参照图5,图5为本发明一种展示设备转向方法一实施例的几何关系示意图。麦克风阵列包括第一麦克风f、第二麦克风g、第三麦克风d和第四麦克风c,各麦克风均位于同一水平面且均匀环绕于转向装置的几何中心a,其中e1为发出语音转动指令的声源位置,半径距离为fa或ga或da或ca。当观看者发出语音转动指令后,由于与声源e1的距离不同,四个麦克风均会收到的分贝大小不同,第一麦克风f、第二麦克风g、第三麦克风d和第四麦克风c接收到语音转动指令时的分贝为第一分贝值、第二分贝值、第三分贝值和第四分贝值,由这些分贝值的大小就能确定对应的麦克风距离声源e1的第一距离fe1、第二距离ge1、第三距离de1和第四距离ce1。基于半径距离fa或ga或da或ca,以及第一距离fe1、第二距离ge1、第三距离de1和第四距离ce1可计算得到目标转动角度∠dad’。
96.可选地,所述基于所述第一距离、所述第二距离、所述第三距离和所述第四距离,以及所述半径距离计算得到所述目标转动角度的步骤,包括:
97.基于所述第三距离和所述第四距离确定所述声源距离所述阵列中心的垂直距离,所述垂直距离包括与所述第一麦克风同侧的第一垂直距离和与所述第二麦克风同侧的第二垂直距离;
98.基于所述第一距离和所述第二距离的大小关系在所述第一垂直距离和所述第二垂直距离中确定得到目标距离,并基于所述第三距离和所述第四距离的大小关系在所述第三距离和所述第四距离中确定得到短边距离;
99.基于所述目标距离,所述短边距离以及所述半径距离计算得到所述目标转动角度。
100.参照图6,图6为本发明一种展示设备转向方法一实施例的确定声源位置示意图。当第三麦克风d接收到声源发出的语音转动指令后,根据分贝大小确定出声源位于以第三麦克风d为圆心,以第三距离de1为半径的圆上;同理,当第四麦克风c接收到声源发出的语音转动指令后,根据分贝大小确定出声源位于以第四麦克风c为圆心,以第四距离ce1为半径的圆上。此时,圆d和圆c存在两个交点:e1和e2,意味着此时声源既可以是e1,也可以是e2。同样,基于第三距离de1和第四距离ce1确定声源距离麦克风阵列的阵列中心的垂直距离既可以是与第一麦克风f同侧的第一垂直距离e1a,也可以是与第二麦克风g同侧的第二垂直距离e2a。其中,计算第一垂直距离e1a和第二垂直距离e2a的方法为采用阿波罗尼斯定理,e1a=(√(2*de12 2*ce12-4*fa2))/4。
101.在确定了第一垂直距离e1a和第二垂直距离e2a后,根据第一距离fe1和第二距离ge1的大小关系在第一垂直距离e1a和第二垂直距离e2a中确定得到目标距离。并基于第三距离de1和第四距离ce1的大小关系在第三距离de1和第四距离ce1中确定得到短边距离。基于目标距离,短边距离以及半径距离fa计算得到目标转动角度。
102.可选地,所述基于所述第一距离和所述第二距离的大小关系在所述第一垂直距离和所述第二垂直距离中确定得到目标距离的步骤,包括:
103.若第一距离大于所述第二距离,则以所述第二垂直距离作为所述目标距离;
104.若第一距离小于所述第二距离,则以所述第一垂直距离作为所述目标距离。
105.可选地,所述基于所述第三距离和所述第四距离的大小关系在所述第三距离和所述第四距离中确定得到短边距离的步骤,包括:
106.若第三距离大于所述第四距离,则以所述第四距离作为所述短边距离;
107.若第三距离小于所述第四距离,则以所述第三距离作为所述短边距离。
108.如果第一距离fe1大于第二距离ge1,则说明声源更靠近第二麦克风g一侧,以第二垂直距离e2a作为目标距离;若第一距离fe1小于第二距离ge1,则说明声源更靠近第一麦克风f一侧,以第一垂直距离e1a作为目标距离。
109.如果第三距离de1大于第四距离ce1,则以第四距离ce1作为短边距离;
110.如果第三距离de1小于第四距离ce1,则以第三距离de1作为短边距离。
111.可选地,所述基于所述目标距离,所述短边距离以及所述半径距离计算得到所述目标转动角度的步骤,包括:
112.基于所述目标距离,所述短边距离以及所述半径距离计算得到初始角度,以所述初始角度的余角作为所述目标转动角度。
113.参照图5,以声源位于e1为例进行说明。其中,目标距离为e21,短边距离为第三距离de1,半径距离为fa,根据余弦定理可计算得到初始角度∠dae1,∠dae1=arccos((e1a2 fa2-de12)/2*e1a*fa)。而目标转动角度为初始角度∠dae1的余角,∠dad’=90
°‑
∠dae1。从而让观看者的视线e1a正好垂直于屏幕,从而获得最佳观看角度。
114.可选地,所述展示设备转向方法,还包括:
115.若在预设接收时间内从所述环境声音中检测到多个所述语音转动指令,则获取多个所述语音转动指令对应的所述初始角度;
116.基于多个所述语音转动指令对应的所有所述初始角度确定得到目标初始角度,基于所述目标初始角度确定得到所述目标转动角度。
117.上述为一个观看者时的转动策略,当有多个观看者同时观看时,便无法使得屏幕或展示设备垂直于所有观看者的视线。在无法满足所有观看者的观看体验、使所有观看者都拥有最佳观看角度时,本实施例通过使每个观看者的视线尽可能的垂直于屏幕或展示设备,从而提高观看体验下限的方式尽可能满足所有观看者的观看体验。
118.当在预设接收时间内从环境声音中检测到多个语音转动指令时,通过上述实施例中的方法获取多个语音转动指令对应的初始角度。
119.在本实施例中,确定最小的两个所述初始角度的补角,以所述补角的一半角度的作为新的所述初始角度,直至剩下一个所述初始角度。确定最小的两个初始角度,以最小的两个初始角度的补角的一半角度作为一个新的初始角度,不断减小初始角度的数量,直到最终只剩下一个初始角度,即为最终确定下来的初始角度。同样的,以最终的初始角度的余角作为目标转动角度。
120.可选的,所述转向装置还包括转向位置比较器,在所述根据所述目标转动角度控制所述转向模组带动所述展示设备进行转动的步骤之后,还包括:
121.获取所述转向电机的实时角度,通过所述转向位置比较器比较所述实时角度与所述目标转动角度;
122.当所述实时角度与所述目标转动角度相同时,停止转动所述展示设备。
123.参照图4,转向装置的转动会实时更新到转向位置比较器中,转向位置比较器比较实时角度与目标转动角度的大小,当二者相同时,说明转动到位,停止驱动转向电机。通过闭环的反馈机制,以便展示设备能精准转动到位。
124.此外,本发明实施例还提供一种转向设备,所述转向设备包括:转向装置、存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序配置为实现如上所述的展示设备转向方法的步骤。
125.此外,本发明实施例还提供一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如上所述的展示设备转向方法的步骤。
126.需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者系统不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者系统所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括该要素的过程、方法、物品或者系统中还存在另外的相同要素。
127.上述本发明实施例序号仅仅为了描述,不代表实施例的优劣。
128.通过以上的实施方式的描述,本领域的技术人员可以清楚地了解到上述实施例方法可借助软件加必需的通用硬件平台的方式来实现,当然也可以通过硬件,但很多情况下前者是更佳的实施方式。基于这样的理解,本发明的技术方案本质上或者说对现有技术做出贡献的部分可以以软件产品的形式体现出来,该计算机软件产品存储在如上所述的一个存储介质(如rom/ram、磁碟、光盘)中,包括若干指令用以使得一台终端设备(可以是手机,计算机,服务器,或者网络设备等)执行本发明各个实施例所述的方法。
129.以上仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。