1.本发明涉及航路计划装置、航路计划方法、以及程序。
背景技术:
2.在专利文献1中公开了一种航路计划装置,该航路计划装置具有:显示部,在地图上显示用户制作的航行预定的路线;日期时间输入部,接受所述路线的航行日期时间的输入;注意信息读出部,基于输入至所述日期时间输入部的航行日期时间,读出对航行造成影响的信息即与位置以及日期时间相关联的信息即注意信息;以及路线验证部,基于所述注意信息读出部读出的所述注意信息所示的位置和所述路线的位置提取至少位于该路线上或路线的附近的所述注意信息,并基于提取出的所述注意信息来验证所述路线。
3.现有技术文献
4.专利文献
5.专利文献1:日本专利第6076611号公报
技术实现要素:
6.发明所要解决的问题
7.然而,在航路计划时,航路点伴随着根据点而被设定。根据点是从船上容易确认的物标,例如灯塔、浮标、海角等。航海员一边选择这样的根据点一边设定航路点。
8.在通过ecdis等进行航路计划的情况下,不仅需要输入航路点以及根据点,还需要输入从航路点到根据点的距离以及方向,过程繁琐。在ecdis中手动地选择了根据点之后,能够一边确认距该根据点的距离以及方向,一边设定航路点。
9.本发明鉴于上述问题而提出,其主要目的在于,提供一种容易设定航路点及其根据点的航路计划装置、航路计划方法、以及程序。
10.解决问题的技术手段
11.为了解决上述问题,本发明的一个方式的航路计划装置,具有:显示部,在画面上显示海图;操作部,指定所述画面内的位置;存储部,将能够成为航路点的根据点的一个或多个根据点候选与位置建立关联地存储;点设定部,根据所述操作部接受的用户的操作,在所述海图内设定航路点;候选获取部,从所述存储部中获取位于以被设定的所述航路点为基准的范围内的所述根据点候选;以及根据点确定部,从获取到的所述根据点候选中,确定被设定的所述航路点的根据点。
12.另外,本发明的另一个方式的航路计划方法,根据用户的操作在海图内设定航路点,从将能够成为航路点的根据点的一个或多个根据点候选与位置建立关联地存储的存储部,获取位于以被设定的所述航路点为基准的范围内的所述根据点候选,从获取到的所述根据点候选中,确定被设定的所述航路点的根据点。
13.另外,本发明的另一个方式的程序,用于使计算机作为如下功能部发挥作用:点设定部,在海图内设定航路点;候选获取部,从将能够成为航路点的根据点的一个或多个根据
点候选与位置建立关联地存储的存储部,获取位于以被设定的所述航路点为基准的范围内的所述根据点候选;以及根据点确定部,从获取到的所述根据点候选中,确定被设定的所述航路点的根据点。
14.发明效果
15.根据本发明,能够容易设定航路点及其根据点。
附图说明
16.图1是表示船舶ict系统的结构例的图。
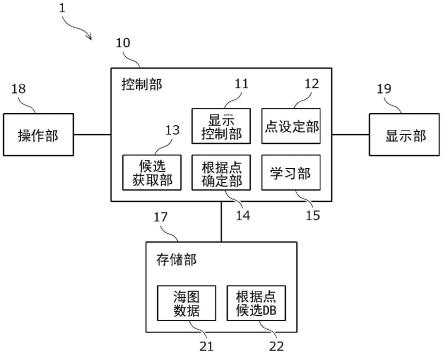
17.图2是表示航路计划装置的结构例的图。
18.图3是表示数据库的内容例的图。
19.图4是表示航路计划方法的过程例的图。
20.图5是表示画面显示例的图。
21.图6是表示画面显示例的图。
具体实施方式
22.以下,参照附图对本发明的实施方式进行说明。
23.图1是表示具有实施方式的航路计划装置1的船舶ict系统100的结构例的框图。
24.船舶ict系统100除了航路计划装置1以外,还具有例如雷达2、gnss接收器3、陀螺罗盘4、以及ais5等。这些设备例如与lan(local area network:局域网)等网络n连接,并能够相互网络通信。
25.航路计划装置1是ecdis(electronic chart display and information system:电子海图显示与信息系统)。但不限于此,航路计划装置1也可以是gnss绘图机。航路计划装置1的具体的结构例将在后面说明。
26.雷达2检测存在于本船的周围的目标,并生成表示目标的位置以及速度矢量的目标跟踪数据(tt数据)。
27.gnss接收器3基于从gnss(global navigation satellite system:全球导航卫星系统)接收到的电波来检测本船的位置,生成表示本船的位置的位置数据。
28.陀螺罗盘4检测本船的船头方位,生成表示船头方位的方位数据。但不限于此,也可以使用gps罗盘或磁罗盘。
29.ais(automatic identification system:自动识别系统)5对周围的船舶以及陆地的管制发送ais数据,并且从周围的船舶以及陆地的管制接收ais数据。但不限于此,也可以使用vdes(vhf data exchange system:vhf数据交换系统)。
30.图2是表示航路计划装置1的结构例的框图。航路计划装置1具有控制部10、存储部17、操作部18、以及显示部19。
31.控制部10是包括cpu、ram、rom、以及输入输出接口等的计算机。存储部17是非易失性存储器等辅助存储装置。控制部10的cpu按照从存储部17加载到ram的程序来执行信息处理。
32.程序也可以例如经由光盘或存储器卡等信息存储介质被供给,也可以例如经由互联网或lan等通信网络被供给。
33.存储部17中除了程序以外,还存储有海图数据21以及根据点候选数据库(根据点候选db)22等。根据点候选db22也可以被构建在外部,经由互联网等的通信网络来访问。
34.操作部18例如是轨迹球或触摸传感器等的、指定显示部19的画面内的位置的指示设备。显示部19是例如液晶显示器或有机el显示器等显示装置。
35.控制部10具有显示控制部11、点设定部12、候选获取部13、根据点确定部14、以及学习部15。这些功能部通过控制部10的cpu按照程序执行信息处理来实现。这些功能部的动作的详细将在后面说明。
36.图3是表示根据点候选db22的内容例的图。根据点候选db22将能够成为航路点的根据点的根据点候选与位置建立关联地存储。根据点候选db22包括“id”、“种类”、“位置”、“高度”、以及“光达”等字段。
[0037]“id”是用于识别根据点候选的识别符。“种类”表示根据点候选的种类。根据点候选的种类包括例如灯塔、浮标、海角等物标。“位置”表示根据点候选的位置。根据点候选的位置例如由纬度/经度的位置坐标来表示。
[0038]“高度”表示根据点候选的高度。在根据点候选是灯塔的情况下,“光达”表示灯塔的光到达的距离。
[0039]
图4是表示在航路计划装置1中实现的实施方式的航路计划方法的过程例的流程图。航路计划装置1的控制部10按照程序执行该图所示的信息处理。图5以及图6是表示画面显示例的图。
[0040]
首先,控制部10基于存储部17中存储的海图数据21,在显示部19的画面上显示海图nc(s11;作为显示控制部11的处理)。
[0041]
接着,控制部10根据操作部18接受的用户的操作,在海图nc内设定航路点wp(s12;作为点设定部12的处理)。
[0042]
如图5所示,在显示部19的画面上显示有与操作部18联动的指针ar,在海图nc内的指定的位置设定有航路点wp。另外,在显示部19的画面上也显示有遵循航路点wp的路线rt。在海图nc内也包括灯塔、浮标、海角等物标tg。
[0043]
当在海图nc内设置有航路点wp时(s12为“是”),控制部10从根据点候选db22中提取位于以航路点wp为基准的范围内的根据点候选(s13;作为候选获取部13的处理)。
[0044]
具体而言,控制部10参照根据点候选db22中存储的各根据点候选的位置,来判定各根据点候选是否包括在以航路点wp为基准的范围内,并提取被判定为包含在范围内的根据点候选。
[0045]
例如,提取以航路点wp为中心的规定半径的圆形范围内所包含的根据点候选。但不限于此,例如也可以是相比船舶的前后方向(船头-船尾)在左右方向(左舷-右舷)长的椭圆形状的范围。
[0046]
接着,控制部10针对提取出的各根据点候选,来计算距航路点wp的距离以及方向(s14)。从航路点wp到根据点候选的方向以相对于船头方向的角度来表示。例如。右舷方向设为90度、左舷方向设为270度。
[0047]
接着,控制部10针对提取出的各根据点候选来计算优先级(s15)。优先级基于距航路点wp的距离以及方向中的至少一个。
[0048]
具体而言,从航路点wp到根据点候选为止的距离越接近基准距离则优先级越高,
从航路点wp朝向根据点候选的方向相对于船头方向越接近90度,则优先级越高。
[0049]
例如,优先级由下述函数f来表示,该函数f以从航路点wp到根据点候选的距离d、从航路点wp到根据点候选的方向(相对于船头方向的角度)θ、根据点候选的种类而设定的得分p、根据点候选的高度h、以及根据点候选为灯塔的情况下的光的到达距离dl等为变量。
[0050]
f(d,θ,p,h,dl,
…
)=αd βθ γp δh εdl
…
[0051]
该函数f的值越大或越小则优先级越高。在此,α、β、γ、δ、ε是各变量的加权系数。
[0052]
d也可以是与规定的基准值d0的差分或者其倒数,θ也可以是与规定的基准角度θ0(例如90度)的差分或者其倒数。
[0053]
从航路点wp到根据点候选的方向(相对于船头方向的角度)是从眼前的航路点朝向航路点wp的直线(眼前的路径rt)的延长线与连结航路点wp和根据点候选的直线所成的角。
[0054]
接着,控制部10将提取出的根据点候选的符号以及列表在显示部19的画面上显示(s16;作为显示控制部的处理)。
[0055]
如图6所示,在显示部19的画面上,表示根据点候选的符号cd被附加于根据点候选的物标tg来显示。另外,在航路点wp与根据点候选的物标tg之间显示有连结两者的线dl,在其旁边显示有表示距离和方向的字符串kh。
[0056]
在图的例子中,对位于相对于航路点wp为1.5nm(nautical mile)的距离且90度(正横向)的方向的灯塔、位于0.5nm的距离且320度的方向的浮标、以及位于3.1nm的距离且85度的方向的灯塔附加有符号cd。
[0057]
而且,在显示部19的画面上还显示有根据点候选的列表lst。在列表lst中,根据点候选按上述的优先级降序排列。
[0058]
在图的例子中,位于相对于航路点wp为1.5nm的距离且90度的方向的灯塔、位于0.5nm的距离且320度的方向的浮标、以及位于3.1nm的距离且85度的方向的灯塔的项目按照该顺序包含在列表ls中。
[0059]
接着,控制部10将显示部19的画面中显示的根据点候选中的、通过操作部18接受的用户的操作而选择出的根据点候选,确定为航路点wp的根据点(s17、s18;作为根据点确定部14的处理)。
[0060]
如图6所示,通过由指针ar指定表示作为根据点候选的符号cd或列表lst中包含的根据点候选的项目,来实现根据点候选的选择。
[0061]
此外,为了避免画面显示变得复杂,也可以仅将与在列表lst中选择出的根据点候选的项目对应的符号cd识别显示为其他的符号cd,并附加线dl以及字符串kh。
[0062]
根据以上说明的实施方式,当设定航路点时,向用户提示其附近的根据点候选,用户从中选择根据点即可,因此容易设定航路点及其根据点。另外,在向用户提示的列表中,根据优先级排列有根据点候选,用户从优先级为上位的根据点候选进行确认即可,因此能够进行根据点的高效的选择。
[0063]
此外,也可以从提取出的根据点候选中自动地将优先级最高的确定为根据点,但航路点及其根据点的选定基于航海员的经验,并没有绝对的基准,而在某种程度上可能加入个人的偏好,因此,如上述实施方式那样,优选地构成为向用户提示根据点候选并接受选择。
[0064]
控制部10也可以基于用户的选择结果来调整优先级(作为学习部15的处理)。即,在选择了优先级为第二位以后的根据点候选的情况下,通过最优化用于计算优先级的函数的加权系数,从而能够与个人的偏好匹配。例如能够通过进行将选择出的根据点候选作为正解的有教师学习,来实现优先级的调整。
[0065]
以上,对本发明的实施方式进行了说明,但本发明不限于以上说明的实施方式,当然,对于本领域技术人员来说,能够进行各种变更。
[0066]
附图标记的说明:
[0067]
1海图显示装置、10控制部、11显示控制部、12点设定部、13候选获取部、14根据点确定部、15学习部、17存储部、18操作部、19显示部、2雷达、3gnss接收器、4陀螺罗盘、5ais、100船舶ict系统。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。