1.本实用新型涉及光学成像设备技术领域,具体而言,涉及一种成像系统。
背景技术:
2.随着用户对手机功能需求的增加,各大手机厂商为了满足用户的各种需求,在手机的软硬件的性能方面的研究逐渐深入;对于光学成像设备技术领域来说,主要表现在手机的拍照功能上,为了增加手机的成像质量,搭载在手机上的成像系统需要不断的改进和提升。也就是说,手机上搭载的成像系统是手机拍照的关键。一些厂商提出了一种成像系统,该成像系统虽然具有高像素、高分辨率的特点,但是不能满足具备超广角等特点,因此对成像系统的视场角进行针对性的开发,同时也是目前手机镜头设计的主要关注点。
3.也就是说,现有技术中的成像系统存在超广角和高像素难以同时实现的问题。
技术实现要素:
4.本实用新型的主要目的在于提供一种成像系统,以解决现有技术中的成像系统存在超广角和高像素难以同时实现的问题。
5.为了实现上述目的,根据本实用新型的一个方面,提供了一种成像系统,由物体侧至成像侧依次包括:具有负光焦度的第一镜片;具有正光焦度的第二镜片;具有正光焦度的第三镜片;具有负光焦度的第四镜片;具有正光焦度的第五镜片;具有负光焦度的第六镜片;其中,第一镜片的物体侧面为凹面,成像侧面为凹面;第二镜片的物体侧面为凸面,成像侧面为凹面;第三镜片的物体侧面为凸面,成像侧面为凸面;第四镜片的成像侧面为凹面;第五镜片的成像侧面为凸面;第六镜片的物体侧面为凸面,成像侧面为凹面;第四镜片、第五镜片、第六镜片的合成焦距f456与光阑至成像面的轴上距离sl之间满足:0.7《f456/sl《2.1。
6.进一步地,成像系统的最大视场角fov满足:115
°
《fov《135
°
。
7.进一步地,第一镜片的物体侧面的曲率半径r1、第一镜片的成像侧面的曲率半径r2与第一镜片的有效焦距f1之间满足:2.0《(r1-r2)/f1《3.3。
8.进一步地,第二镜片的有效焦距f2、第三镜片的有效焦距f3与第五镜片的有效焦距f5之间满足:1.2《f2/(f3 f5)《2.3。
9.进一步地,第四镜片的有效焦距f4与第六镜片的有效焦距f6之间满足:0《f6/f4《1.3。
10.进一步地,第二镜片的物体侧面的曲率半径r3、第二镜片的成像侧面的曲率半径r4、第三镜片的物体侧面的曲率半径r5与第三镜片的成像侧面的曲率半径r6之间满足:0.6《(r3 r4)/(r5-r6)《1.6。
11.进一步地,成像系统的有效焦距f、第四镜片的成像侧面的曲率半径r8与第五镜片的成像侧面的曲率半径r10之间满足:0.6《(r8 r10)/f《1.1。
12.进一步地,第六镜片的物体侧面的曲率半径r11与第六镜片的成像侧面的曲率半
径r12之间满足:1.0《(r11 r12)/(r11-r12)《3.0。
13.进一步地,第一镜片的物体侧面的有效半口径dt11、第三镜片的物体侧面的有效半口径dt31与第三镜片的成像侧面的有效半口径dt32之间满足:0.7《dt11/(dt31 dt32)《1.8。
14.进一步地,第二镜片和第三镜片的合成焦距f23、第一镜片与第二镜片在光轴上的空气间隔t12、第二镜片与第三镜片在光轴上的空气间隔t23之间满足:2.2《f23/(t12 t23)《4.8。
15.进一步地,第五镜片的成像侧面和光轴的交点至第五镜片的成像侧面的有效半径顶点之间的轴上距离sag52、第三镜片的成像侧面和光轴的交点至第三镜片的成像侧面的有效半径顶点之间的轴上距离sag32、第一镜片的成像侧面和光轴的交点至第一镜片的成像侧面的有效半径顶点之间的轴上距离sag12之间满足:0.6《sag52/(sag32-sag12)《1.4。
16.进一步地,第一镜片的边缘厚度et1、第二镜片的边缘厚度et4、第一镜片在光轴上的中心厚度ct1与第四镜片在光轴上的中心厚度ct4之间满足:1.0《(et1 et4)/(ct1 ct4)《1.8。
17.进一步地,第一镜片在光轴上的中心厚度ct5与第五镜片的边缘厚度et5之间满足:2.2《ct5/et5《4.2。
18.根据本实用新型的另一方面,提供了一种成像系统,由物体侧至成像侧依次包括:具有负光焦度的第一镜片;具有正光焦度的第二镜片;具有正光焦度的第三镜片;具有负光焦度的第四镜片;具有正光焦度的第五镜片;具有负光焦度的第六镜片;其中,第一镜片的物体侧面为凹面,成像侧面为凹面;第二镜片的物体侧面为凸面,成像侧面为凹面;第三镜片的物体侧面为凸面,成像侧面为凸面;第四镜片的成像侧面为凹面;第五镜片的成像侧面为凸面;第六镜片的物体侧面为凸面,成像侧面为凹面;第一镜片的边缘厚度et1、第二镜片的边缘厚度et4、第一镜片在光轴上的中心厚度ct1与第四镜片在光轴上的中心厚度ct4之间满足:1.0《(et1 et4)/(ct1 ct4)《1.8。
19.进一步地,第四镜片、第五镜片、第六镜片的合成焦距f456与光阑至成像面的轴上距离sl之间满足:0.7《f456/sl《2.1;成像系统的最大视场角fov满足:115
°
《fov《135
°
。
20.进一步地,第一镜片的物体侧面的曲率半径r1、第一镜片的成像侧面的曲率半径r2与第一镜片的有效焦距f1之间满足:2.0《(r1-r2)/f1《3.3。
21.进一步地,第二镜片的有效焦距f2、第三镜片的有效焦距f3与第五镜片的有效焦距f5之间满足:1.2《f2/(f3 f5)《2.3。
22.进一步地,第四镜片的有效焦距f4与第六镜片的有效焦距f6之间满足:0《f6/f4《1.3。
23.进一步地,第二镜片的物体侧面的曲率半径r3、第二镜片的成像侧面的曲率半径r4、第三镜片的物体侧面的曲率半径r5与第三镜片的成像侧面的曲率半径r6之间满足:0.6《(r3 r4)/(r5-r6)《1.6。
24.进一步地,成像系统的有效焦距f、第四镜片的成像侧面的曲率半径r8与第五镜片的成像侧面的曲率半径r10之间满足:0.6《(r8 r10)/f《1.1。
25.进一步地,第六镜片的物体侧面的曲率半径r11与第六镜片的成像侧面的曲率半径r12之间满足:1.0《(r11 r12)/(r11-r12)《3.0。
26.进一步地,第一镜片的物体侧面的有效半口径dt11、第三镜片的物体侧面的有效半口径dt31与第三镜片的成像侧面的有效半口径dt32之间满足:0.7《dt11/(dt31 dt32)《1.8;第二镜片和第三镜片的合成焦距f23、第一镜片与第二镜片在光轴上的空气间隔t12、第二镜片与第三镜片在光轴上的空气间隔t23之间满足:2.2《f23/(t12 t23)《4.8。
27.进一步地,第五镜片的成像侧面和光轴的交点至第五镜片的成像侧面的有效半径顶点之间的轴上距离sag52、第三镜片的成像侧面和光轴的交点至第三镜片的成像侧面的有效半径顶点之间的轴上距离sag32、第一镜片的成像侧面和光轴的交点至第一镜片的成像侧面的有效半径顶点之间的轴上距离sag12之间满足:0.6《sag52/(sag32-sag12)《1.4。
28.进一步地,第一镜片在光轴上的中心厚度ct5与第五镜片的边缘厚度et5之间满足:2.2《ct5/et5《4.2。
29.应用本实用新型的技术方案,成像系统由物体侧至成像侧依次包括具有负光焦度的第一镜片、具有正光焦度的第二镜片、具有正光焦度的第三镜片、具有负光焦度的第四镜片、具有正光焦度的第五镜片和具有负光焦度的第六镜片;其中,第一镜片的物体侧面为凹面,成像侧面为凹面;第二镜片的物体侧面为凸面,成像侧面为凹面;第三镜片的物体侧面为凸面,成像侧面为凸面;第四镜片的成像侧面为凹面;第五镜片的成像侧面为凸面;第六镜片的物体侧面为凸面,成像侧面为凹面;第四镜片、第五镜片、第六镜片的合成焦距f456与光阑至成像面的轴上距离sl之间满足:0.7《f456/sl《2.1。
30.通过设置第一镜片的光焦度为负配合第二镜片和第三镜片正的光焦度,第一可以有效用来扩大成像系统的视场角,第二可以使系统光焦度的分配更加合理,对提升系统像差的矫正能力和降低系统敏感性至关重要。而拥有负光焦度的第四镜片和具有正光焦度的第五镜片是提升成像系统在成像面的像高的关键所在。第六镜片具有负光焦度可以有效地增大成像系统的通光量,有利于拥有高的相对照度,可以很好的提升成像系统在较暗环境下的成像质量,以增加通用性。通过约束第四镜片、第五镜片、第六镜片的合成焦距f456与光阑至成像面的轴上距离sl之间的比值,第一使得成像系统可以有效地控制畸变量;降低第五镜片和第六镜片之间的鬼像风险,使成像系统拥有更加优秀的成像质量。
附图说明
31.构成本技术的一部分的说明书附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。在附图中:
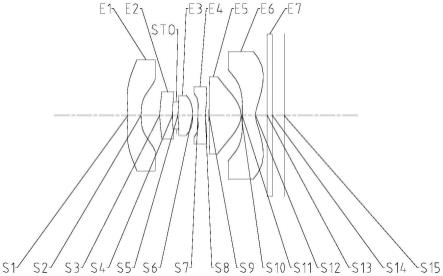
32.图1示出了本实用新型的例子一的成像系统的结构示意图;
33.图2至图5分别示出了图1中的成像系统的轴上色差曲线、象散曲线、畸变曲线以及倍率色差曲线;
34.图6示出了本实用新型的例子二的成像系统的结构示意图;
35.图7至图10分别示出了图6中的成像系统的轴上色差曲线、象散曲线、畸变曲线以及倍率色差曲线;
36.图11示出了本实用新型的例子三的成像系统的结构示意图;
37.图12至图15分别示出了图11中的成像系统的轴上色差曲线、象散曲线、畸变曲线以及倍率色差曲线;
38.图16示出了本实用新型的例子四的成像系统的结构示意图;
39.图17至图20分别示出了图16中的成像系统的轴上色差曲线、象散曲线、畸变曲线以及倍率色差曲线。
40.其中,上述附图包括以下附图标记:
41.sto、光阑;e1、第一镜片;s1、第一镜片的物体侧面;s2、第一镜片的成像侧面;e2、第二镜片;s3、第二镜片的物体侧面;s4、第二镜片的成像侧面;e3、第三镜片;s5、第三镜片的物体侧面;s6、第三镜片的成像侧面;e4、第四镜片;s7、第四镜片的物体侧面;s8、第四镜片的成像侧面;e5、第五镜片;s9、第五镜片的物体侧面;s10、第五镜片的成像侧面;e6、第六镜片;s11、第六镜片的物体侧面;s12、第六镜片的成像侧面;e7、滤光片;s13、滤光片的物体侧面;s14、滤光片的成像侧面;s15、成像面。
具体实施方式
42.需要说明的是,在不冲突的情况下,本技术中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本实用新型。
43.需要指出的是,除非另有指明,本技术使用的所有技术和科学术语具有与本技术所属技术领域的普通技术人员通常理解的相同含义。
44.在本实用新型中,在未作相反说明的情况下,使用的方位词如“上、下、顶、底”通常是针对附图所示的方向而言的,或者是针对部件本身在竖直、垂直或重力方向上而言的;同样地,为便于理解和描述,“内、外”是指相对于各部件本身的轮廓的内、外,但上述方位词并不用于限制本实用新型。
45.应注意,在本说明书中,第一、第二、第三等的表述仅用于将一个特征与另一个特征区分开来,而不表示对特征的任何限制。因此,在不背离本技术的教导的情况下,下文中讨论的第一镜片也可被称作第二镜片或第三镜片。
46.在附图中,为了便于说明,已稍微夸大了镜片的厚度、尺寸和形状。具体来讲,附图中所示出的球面或非球面的形状通过实例的方式示出。即,球面或非球面的形状不限于附图中示出的球面或非球面的形状。附图仅为示例而并非严格按比例绘制。
47.在本文中,近轴区域是指光轴附近的区域。若镜片表面为凸面且未界定该凸面位置时,则表示该镜片表面至少于近轴区域为凸面;若镜片表面为凹面且未界定该凹面位置时,则表示该镜片表面至少于近轴区域为凹面。每个镜片靠近物体侧的表面成为该镜片的物体侧面,每个镜片靠近成像侧的表面称为该镜片的成像侧面。在近轴区域的面形的判断可依据该领域中通常知识者的判断方式,以r值,(r指近轴区域的曲率半径,通常指光学软件中的镜片数据库(lens data)上的r值)正负判断凹凸。以物体侧面来说,当r值为正时,判定为凸面,当r值为负时,判定为凹面;以成像侧面来说,当r值为正时,判定为凹面,当r值为负时,判定为凸面。
48.为了解决现有技术中的成像系统存在超广角和高像素难以同时实现的问题,本实用新型提供了一种成像系统。
49.实施例一
50.如图1至图20所示,成像系统由物体侧至成像侧依次包括具有负光焦度的第一镜片、具有正光焦度的第二镜片、具有正光焦度的第三镜片、具有负光焦度的第四镜片、具有
正光焦度的第五镜片和具有负光焦度的第六镜片;其中,第一镜片的物体侧面为凹面,成像侧面为凹面;第二镜片的物体侧面为凸面,成像侧面为凹面;第三镜片的物体侧面为凸面,成像侧面为凸面;第四镜片的成像侧面为凹面;第五镜片的成像侧面为凸面;第六镜片的物体侧面为凸面,成像侧面为凹面;第四镜片、第五镜片、第六镜片的合成焦距f456与光阑至成像面的轴上距离sl之间满足:0.7《f456/sl《2.1。
51.优选地,0.9《f456/sl《2.0。
52.通过设置第一镜片的光焦度为负配合第二镜片和第三镜片正的光焦度,第一可以有效用来扩大成像系统的视场角,第二可以使系统光焦度的分配更加合理,对提升系统像差的矫正能力和降低系统敏感性至关重要。而拥有负光焦度的第四镜片和具有正光焦度的第五镜片是提升成像系统在成像面的像高的关键所在。第六镜片具有负光焦度可以有效地增大成像系统的通光量,有利于拥有高的相对照度,可以很好的提升成像系统在较暗环境下的成像质量,以增加通用性。通过约束第四镜片、第五镜片、第六镜片的合成焦距f456与光阑至成像面的轴上距离sl之间的比值,第一使得成像系统可以有效地控制畸变量;降低第五镜片和第六镜片之间的鬼像风险,使成像系统拥有更加优秀的成像质量。
53.在本实施例中,成像系统的最大视场角fov满足:115
°
《fov《135
°
。通过约束成像系统的最大视场角fov在115
°
至135
°
的范围内,有利于保证成像系统超广角的特性。优选地,119
°
《fov《129
°
。
54.在本实施例中,第一镜片的物体侧面的曲率半径r1、第一镜片的成像侧面的曲率半径r2与第一镜片的有效焦距f1之间满足:2.0《(r1-r2)/f1《3.3。满足此条件式,可以有效的平衡边缘视场的像差,保证在拥有更大视场角的同时仍具有很好的像质。优选地,2.2《(r1-r2)/f1《3.2。
55.在本实施例中,第二镜片的有效焦距f2、第三镜片的有效焦距f3与第五镜片的有效焦距f5之间满足:1.2《f2/(f3 f5)《2.3。满足此条件式,有助于提升系统的成像面高度,使系统的成像范围更广且有助于改善第三镜片和第五镜片的加工工艺性。优选地,1.4《f2/(f3 f5)《2.2。
56.在本实施例中,第四镜片的有效焦距f4与第六镜片的有效焦距f6之间满足:0《f6/f4《1.3。通过约束第四镜片的有效焦距f4与第六镜片的有效焦距f6之间的关系式,可以将第四镜片的球差贡献量控制在合理的范围内,从而使得系统的轴上视场区域具有更佳的成像质量。优选地,0.1《f6/f4《1.2。
57.在本实施例中,第二镜片的物体侧面的曲率半径r3、第二镜片的成像侧面的曲率半径r4、第三镜片的物体侧面的曲率半径r5与第三镜片的成像侧面的曲率半径r6之间满足:0.6《(r3 r4)/(r5-r6)《1.6。满足此条件式,使得第三镜片的像散和慧差贡献量被控制在合理的范围,并且可以有效地平衡掉前面镜片所遗留的像散和慧差,从而使得成像系统有更好的成像质量。优选地,0.8《(r3 r4)/(r5-r6)《1.4。
58.在本实施例中,成像系统的有效焦距f、第四镜片的成像侧面的曲率半径r8与第五镜片的成像侧面的曲率半径r10之间满足:0.6《(r8 r10)/f《1.1。满足此条件式,可增大第四镜片和第五镜片组合的视场角,提高角放大倍率,呈现更加清晰的摄物细节。优选地,0.7《(r8 r10)/f《1.0。
59.在本实施例中,第六镜片的物体侧面的曲率半径r11与第六镜片的成像侧面的曲
率半径r12之间满足:1.0《(r11 r12)/(r11-r12)《3.0。通过合理分配第六镜片的物体侧面和成像侧面的曲率半径,配合前五片镜片可以使得成像系统的像差得到更好地矫正,对色差的矫正也极为有利。优选地,1.1《(r11 r12)/(r11-r12)《2.9。
60.在本实施例中,第一镜片的物体侧面的有效半口径dt11、第三镜片的物体侧面的有效半口径dt31与第三镜片的成像侧面的有效半口径dt32之间满足:0.7《dt11/(dt31 dt32)《1.8。满足此条件式,可以有效减小成像系统的高度并且有助成像系统的整体尺寸的压缩。优选地,0.9《dt11/(dt31 dt32)《1.7。
61.在本实施例中,第二镜片和第三镜片的合成焦距f23、第一镜片与第二镜片在光轴上的空气间隔t12、第二镜片与第三镜片在光轴上的空气间隔t23之间满足:2.2《f23/(t12 t23)《4.8。满足此条件式,可以有效地减小整个系统的像差,降低系统的敏感性,避免由于f23过大会造成的工艺性太差,同时也避免了第一镜片和第二镜片由于倾角过大而造成较高的敏感性。优选地,2.4《f23/(t12 t23)《4.7。
62.在本实施例中,第五镜片的成像侧面和光轴的交点至第五镜片的成像侧面的有效半径顶点之间的轴上距离sag52、第三镜片的成像侧面和光轴的交点至第三镜片的成像侧面的有效半径顶点之间的轴上距离sag32、第一镜片的成像侧面和光轴的交点至第一镜片的成像侧面的有效半径顶点之间的轴上距离sag12之间满足:0.6《sag52/(sag32-sag12)《1.4。满足此条件式,可以有效避免场曲和色差,且不容易产生像散和球差,对于有效改善第一镜片和第三镜片与其他镜片之间反射的鬼像有很大帮助,从而提升成像质量。优选地,0.7《sag52/(sag32-sag12)《1.3。
63.在本实施例中,第一镜片的边缘厚度et1、第二镜片的边缘厚度et4、第一镜片在光轴上的中心厚度ct1与第四镜片在光轴上的中心厚度ct4之间满足:1.0《(et1 et4)/(ct1 ct4)《1.8。满足此条件式,可以使成像系统中的镜片的中心厚度和空间间隙得到比较合理的分配,使得在保持成像系统超薄特性的同时,系统色差、畸变可以得到有效地平衡,并且也避免了由于镜片过薄而造成加工工艺方面的困难。优选地,1.2《(et1 et4)/(ct1 ct4)《1.7。
64.在本实施例中,第一镜片在光轴上的中心厚度ct5与第五镜片的边缘厚度et5之间满足:2.2《ct5/et5《4.2。满足此条件式,可将第五镜片的全反射鬼像优化至靠近像面边缘,且保证第五镜片的加工工艺性,有利于控制第五镜片不至于过厚导致的离型困难从而导致面型不佳等问题,从而影响最终成像效果。优选地,2.4《ct5/et5《4.0。
65.实施例二
66.如图1至图20所示,成像系统由物体侧至成像侧依次包括具有负光焦度的第一镜片、具有正光焦度的第二镜片、具有正光焦度的第三镜片、具有负光焦度的第四镜片、具有正光焦度的第五镜片和具有负光焦度的第六镜片;其中,第一镜片的物体侧面为凹面,成像侧面为凹面;第二镜片的物体侧面为凸面,成像侧面为凹面;第三镜片的物体侧面为凸面,成像侧面为凸面;第四镜片的成像侧面为凹面;第五镜片的成像侧面为凸面;第六镜片的物体侧面为凸面,成像侧面为凹面;第一镜片的边缘厚度et1、第二镜片的边缘厚度et4、第一镜片在光轴上的中心厚度ct1与第四镜片在光轴上的中心厚度ct4之间满足:1.0《(et1 et4)/(ct1 ct4)《1.8。
67.优选地,1.2《(et1 et4)/(ct1 ct4)《1.7。
68.通过设置第一镜片的光焦度为负配合第二镜片和第三镜片正的光焦度,第一可以有效用来扩大成像系统的视场角,第二可以使系统光焦度的分配更加合理,对提升系统像差的矫正能力和降低系统敏感性至关重要。而拥有负光焦度的第四镜片和具有正光焦度的第五镜片是提升成像系统在成像面的像高的关键所在。第六镜片具有负光焦度可以有效地增大成像系统的通光量,有利于拥有高的相对照度,可以很好的提升成像系统在较暗环境下的成像质量,以增加通用性。通过约束第一镜片的边缘厚度et1、第二镜片的边缘厚度et4、第一镜片在光轴上的中心厚度ct1与第四镜片在光轴上的中心厚度ct4之间的关系式,可以使成像系统中的镜片的中心厚度和空间间隙得到比较合理的分配,使得在保持成像系统超薄特性的同时,系统色差、畸变可以得到有效地平衡,并且也避免了由于镜片过薄而造成加工工艺方面的困难。
69.在本实施例中,第四镜片、第五镜片、第六镜片的合成焦距f456与光阑至成像面的轴上距离sl之间满足:0.7《f456/sl《2.1。通过约束第四镜片、第五镜片、第六镜片的合成焦距f456与光阑至成像面的轴上距离sl之间的比值,第一使得成像系统可以有效地控制畸变量;降低第五镜片和第六镜片之间的鬼像风险,使成像系统拥有更加优秀的成像质量。优选地,0.9《f456/sl《2.0。
70.在本实施例中,成像系统的最大视场角fov满足:115
°
《fov《135
°
。通过约束成像系统的最大视场角fov在115
°
至135
°
的范围内,有利于保证成像系统超广角的特性。优选地,119
°
《fov《129
°
。
71.在本实施例中,第一镜片的物体侧面的曲率半径r1、第一镜片的成像侧面的曲率半径r2与第一镜片的有效焦距f1之间满足:2.0《(r1-r2)/f1《3.3。满足此条件式,可以有效的平衡边缘视场的像差,保证在拥有更大视场角的同时仍具有很好的像质。优选地,2.2《(r1-r2)/f1《3.2。
72.在本实施例中,第二镜片的有效焦距f2、第三镜片的有效焦距f3与第五镜片的有效焦距f5之间满足:1.2《f2/(f3 f5)《2.3。满足此条件式,有助于提升系统的成像面高度,使系统的成像范围更广且有助于改善第三镜片和第五镜片的加工工艺性。优选地,1.4《f2/(f3 f5)《2.2。
73.在本实施例中,第四镜片的有效焦距f4与第六镜片的有效焦距f6之间满足:0《f6/f4《1.3。通过约束第四镜片的有效焦距f4与第六镜片的有效焦距f6之间的关系式,可以将第四镜片的球差贡献量控制在合理的范围内,从而使得系统的轴上视场区域具有更佳的成像质量。优选地,0.1《f6/f4《1.2。
74.在本实施例中,第二镜片的物体侧面的曲率半径r3、第二镜片的成像侧面的曲率半径r4、第三镜片的物体侧面的曲率半径r5与第三镜片的成像侧面的曲率半径r6之间满足:0.6《(r3 r4)/(r5-r6)《1.6。满足此条件式,使得第三镜片的像散和慧差贡献量被控制在合理的范围,并且可以有效地平衡掉前面镜片所遗留的像散和慧差,从而使得成像系统有更好的成像质量。优选地,0.8《(r3 r4)/(r5-r6)《1.4。
75.在本实施例中,成像系统的有效焦距f、第四镜片的成像侧面的曲率半径r8与第五镜片的成像侧面的曲率半径r10之间满足:0.6《(r8 r10)/f《1.1。满足此条件式,可增大第四镜片和第五镜片组合的视场角,提高角放大倍率,呈现更加清晰的摄物细节。优选地,0.7《(r8 r10)/f《1.0。
76.在本实施例中,第六镜片的物体侧面的曲率半径r11与第六镜片的成像侧面的曲率半径r12之间满足:1.0《(r11 r12)/(r11-r12)《3.0。通过合理分配第六镜片的物体侧面和成像侧面的曲率半径,配合前五片镜片可以使得成像系统的像差得到更好地矫正,对色差的矫正也极为有利。优选地,1.1《(r11 r12)/(r11-r12)《2.9。
77.在本实施例中,第一镜片的物体侧面的有效半口径dt11、第三镜片的物体侧面的有效半口径dt31与第三镜片的成像侧面的有效半口径dt32之间满足:0.7《dt11/(dt31 dt32)《1.8。满足此条件式,可以有效减小成像系统的高度并且有助成像系统的整体尺寸的压缩。优选地,0.9《dt11/(dt31 dt32)《1.7。
78.在本实施例中,第二镜片和第三镜片的合成焦距f23、第一镜片与第二镜片在光轴上的空气间隔t12、第二镜片与第三镜片在光轴上的空气间隔t23之间满足:2.2《f23/(t12 t23)《4.8。满足此条件式,可以有效地减小整个系统的像差,降低系统的敏感性,避免由于f23过大会造成的工艺性太差,同时也避免了第一镜片和第二镜片由于倾角过大而造成较高的敏感性。优选地,2.4《f23/(t12 t23)《4.7。
79.在本实施例中,第五镜片的成像侧面和光轴的交点至第五镜片的成像侧面的有效半径顶点之间的轴上距离sag52、第三镜片的成像侧面和光轴的交点至第三镜片的成像侧面的有效半径顶点之间的轴上距离sag32、第一镜片的成像侧面和光轴的交点至第一镜片的成像侧面的有效半径顶点之间的轴上距离sag12之间满足:0.6《sag52/(sag32-sag12)《1.4。满足此条件式,可以有效避免场曲和色差,且不容易产生像散和球差,对于有效改善第一镜片和第三镜片与其他镜片之间反射的鬼像有很大帮助,从而提升成像质量。优选地,0.7《sag52/(sag32-sag12)《1.3。
80.在本实施例中,第一镜片在光轴上的中心厚度ct5与第五镜片的边缘厚度et5之间满足:2.2《ct5/et5《4.2。满足此条件式,可将第五镜片的全反射鬼像优化至靠近像面边缘,且保证第五镜片的加工工艺性,有利于控制第五镜片不至于过厚导致的离型困难从而导致面型不佳等问题,从而影响最终成像效果。优选地,2.4《ct5/et5《4.0。
81.可选地上述成像系统还可包括用于校正色彩偏差的滤光片或用于保护位于成像面上的感光元件的保护玻璃。
82.在本技术中的成像系统可采用多片镜片,例如上述的六片。通过合理分配各镜片的光焦度、面形、各镜片的中心厚度以及各镜片之间的轴上距离等,可有效降低镜头的敏感度并提高镜头的可加工性,使得成像系统更有利于生产加工并且可适用于智能手机等便携式电子设备。左侧为物体侧,右侧为成像侧。
83.在本技术中,各镜片的镜面中的至少一个为非球面镜面。非球面镜片的特点是:从镜片中心到镜片周边,曲率是连续变化的。与从镜片中心到镜片周边具有恒定曲率的球面镜片不同,非球面镜片具有更佳的曲率半径特性,具有改善歪曲像差及改善像散像差的优点。采用非球面镜片后,能够尽可能地消除在成像的时候出现的像差,从而改善成像质量。
84.然而,本领域技术人员应当理解,在未背离本技术要求保护的技术方案的情况下,可改变构成成像系统的镜片数量,来获得本说明书中描述的各个结果和优点。例如,虽然在实施方式中以六片镜片为例进行了描述,但是成像系统不限于包括六片镜片。如需要,该成像系统还可包括其它数量的镜片。
85.下面参照附图进一步描述可适用于上述实施方式的成像系统的具体面型、参数的
举例。
86.需要说明的是,下述的例子一至例子四中的任何一个例子均适用于本技术的所有实施例。
87.例子一
88.如图1至图5所示,描述了本技术例子一的成像系统。图1示出了例子一的成像系统结构的示意图。
89.如图1所示,成像系统由物体侧至成像侧依序包括:第一镜片e1、第二镜片e2、光阑sto、第三镜片e3、第四镜片e4、第五镜片e5、第六镜片e6、滤光片e7和成像面s15。
90.第一镜片e1具有负光焦度,第一镜片的物体侧面s1为凹面,第一镜片的成像侧面s2为凹面。第二镜片e2具正光焦度,第二镜片的物体侧面s3为凸面,第二镜片的成像侧面s4为凹面。第三镜片e3具有正光焦度,第三镜片的物体侧面s5为凸面,第三镜片的成像侧面s6为凸面。第四镜片e4具有负光焦度,第四镜片的物体侧面s7为凸面,第四镜片的成像侧面s8为凹面。第五镜片e5具有正光焦度,第五镜片的物体侧面s9为凸面,第五镜片的成像侧面s10为凸面。第六镜片e6具有负光焦度,第六镜片的物体侧面s11为凸面,第六镜片的成像侧面s12为凹面。滤光片e7具有滤光片的物体侧面s13和滤光片的成像侧面s14。来自物体的光依序穿过各表面s1至s14并最终成像在成像面s15上。
91.在本例子中,成像系统的总有效焦距f为1.85mm,成像系统的最大视场角fov为128.82
°
,成像系统的总长ttl为6.35mm以及像高imgh为3.29mm。
92.表1示出了例子一的成像系统的基本结构参数表,其中,曲率半径、厚度/距离的单位均为毫米(mm)。
[0093][0094][0095]
表1
[0096]
在例子一中,第一镜片e1至第六镜片e6中的任意一个镜片的物体侧面和成像侧面均为非球面,各非球面镜片的面型可利用但不限于以下非球面公式进行限定:
[0097][0098]
其中,x为非球面沿光轴方向在高度为h的位置时,距非球面顶点的距离矢高;c为非球面的近轴曲率,c=1/r(即,近轴曲率c为上表1中曲率半径r的倒数);k为圆锥系数;ai是非球面第i-th阶的修正系数。下表2给出了可用于例子一中各非球面镜面s1-s12的高次项系数a4、a6、a8、a10、a12、a14、a16、a18、a20、a22、a24、a26、a28、a30。
[0099]
面号a4a6a8a10a12a14a16s12.8359e-01-3.5961e-014.9871e-01-5.9176e-015.4148e-01-3.7001e-011.8759e-01s23.8319e-01-8.7867e-013.3652e 00-1.0523e 012.3361e 01-3.6942e 014.2209e 01s3-1.1547e-02-2.2515e-02-4.7022e-01-5.7375e 001.1726e 02-8.9609e 024.0285e 03s42.3574e-022.7648e-01-1.5983e 014.5356e 02-7.5394e 038.0464e 04-5.7881e 05s57.6908e-038.0204e-01-2.3388e 013.9425e 02-4.1259e 032.6760e 04-9.9255e 04s6-2.7883e-01-1.0918e 002.9008e 01-3.8919e 023.4293e 03-2.0937e 049.0487e 04s7-5.4151e-017.4416e-01-1.0702e 011.3431e 02-1.0847e 035.8798e 03-2.2279e 04s8-3.6389e-013.3334e-01-1.4661e 001.2855e 01-6.7810e 012.3229e 02-5.5076e 02s9-8.3293e-02-8.0240e-026.0721e-01-1.4574e 003.7271e 00-8.7459e 001.4566e 01s106.6115e-01-2.1055e 004.4552e 00-2.9456e 00-1.0871e 013.6914e 01-5.8741e 01s111.0726e-01-2.1366e 008.2381e 00-1.8627e 012.7974e 01-2.9339e 012.2058e 01s12-9.1257e-011.4437e 00-1.8330e 001.7080e 00-1.1563e 005.7331e-01-2.0995e-01面号a18a20a22a24a26a28a30s1-7.0428e-021.9465e-02-3.9036e-035.5191e-04-5.2117e-052.9486e-06-7.5559e-08s2-3.5156e 012.1325e 01-9.3008e 002.8358e 00-5.7280e-016.8775e-02-3.7120e-03s3-1.1889e 042.3980e 04-3.3351e 043.1501e 04-1.9311e 046.9320e 03-1.1061e 03s42.8849e 06-1.0078e 072.4592e 07-4.1027e 074.4566e 07-2.8382e 078.0330e 06s51.1655e 057.3064e 05-4.2755e 061.0988e 07-1.5917e 071.2598e 07-4.2537e 06s6-2.7944e 056.1618e 05-9.5851e 051.0227e 06-7.0864e 052.8530e 05-5.0201e 04s76.0295e 04-1.1735e 051.6311e 05-1.5805e 051.0145e 05-3.8770e 046.6765e 03s89.2807e 02-1.1197e 039.6068e 02-5.7238e 022.2517e 02-5.2599e 015.5258e 00s9-1.6736e 011.3577e 01-7.8760e 003.2295e 00-8.9423e-011.5027e-01-1.1561e-02s105.9282e 01-4.0763e 011.9417e 01-6.3218e 001.3444e 00-1.6840e-019.4287e-03s11-1.2034e 014.7691e 00-1.3578e 002.7045e-01-3.5755e-022.8178e-03-1.0016e-04s125.6992e-02-1.1422e-021.6667e-03-1.7202e-041.1894e-05-4.9398e-079.3121e-09
[0100]
表2
[0101]
图2示出了例子一的成像系统的轴上色差曲线,其表示不同波长的光线经由成像系统后的会聚焦点偏离。图3示出了例子一的成像系统的象散曲线,其表示子午像面弯曲和弧矢像面弯曲。图4示出了例子一的成像系统的畸变曲线,其表示不同视场角对应的畸变大小值。图5示出了例子一的成像系统的倍率色差曲线,其表示光线经由成像系统后在成像面上的不同像高的偏差。
[0102]
根据图2至图5可知,例子一所给出的成像系统能够实现良好的成像品质。
[0103]
例子二
[0104]
如图6至图10所示,描述了本技术例子二的成像系统。在本例子及以下例子中,为简洁起见,将省略部分与例子一相似的描述。图6示出了例子二的成像系统结构的示意图。
[0105]
如图6所示,成像系统由物体侧至成像侧依序包括:第一镜片e1、第二镜片e2、光阑
sto、第三镜片e3、第四镜片e4、第五镜片e5、第六镜片e6、滤光片e7和成像面s15。
[0106]
第一镜片e1具有负光焦度,第一镜片的物体侧面s1为凹面,第一镜片的成像侧面s2为凹面。第二镜片e2具正光焦度,第二镜片的物体侧面s3为凸面,第二镜片的成像侧面s4为凹面。第三镜片e3具有正光焦度,第三镜片的物体侧面s5为凸面,第三镜片的成像侧面s6为凸面。第四镜片e4具有负光焦度,第四镜片的物体侧面s7为凸面,第四镜片的成像侧面s8为凹面。第五镜片e5具有正光焦度,第五镜片的物体侧面s9为凸面,第五镜片的成像侧面s10为凸面。第六镜片e6具有负光焦度,第六镜片的物体侧面s11为凸面,第六镜片的成像侧面s12为凹面。滤光片e7具有滤光片的物体侧面s13和滤光片的成像侧面s14。来自物体的光依序穿过各表面s1至s14并最终成像在成像面s15上。
[0107]
在本例子中,成像系统的总有效焦距f为1.44mm,成像系统的最大视场角fov为120.04
°
,成像系统的总长ttl为4.90mm以及像高imgh为2.36mm。
[0108]
表3示出了例子二的成像系统的基本结构参数表,其中,曲率半径、厚度/距离的单位均为毫米(mm)。
[0109][0110][0111]
表3
[0112]
表4示出了可用于例子二中各非球面镜面的高次项系数,其中,各非球面面型可由上述例子一中给出的公式(1)限定。
[0113]
面号a4a6a8a10a12a14a16s15.5164e-01-1.0374e 002.1009e 00-3.7767e 005.5288e 00-6.3266e 005.5514e 00s28.8546e-01-3.8003e 004.3769e 01-4.3717e 023.0386e 03-1.4748e 045.1030e 04s33.7989e-031.5291e 00-5.3285e 018.1446e 02-7.8776e 035.1979e 04-2.4255e 05s42.1952e-01-1.5285e 011.0322e 03-4.0696e 041.0349e 06-1.7914e 072.1815e 08s5-1.7679e-012.5587e 01-1.6296e 036.3364e 04-1.6181e 062.8363e 07-3.5100e 08s6-3.7861e-01-1.9529e 018.9250e 02-2.3610e 044.0569e 05-4.7806e 063.9768e 07s7-1.7860e 002.3516e 01-4.9330e 027.5501e 03-8.2109e 046.3724e 05-3.5668e 06
s8-1.5464e 009.6088e 00-7.9012e 016.0723e 02-3.6346e 031.5968e 04-5.0992e 04s9-4.2198e-01-1.7318e 003.6034e 01-2.3433e 029.4521e 02-2.6594e 035.3809e 03s101.0717e 00-6.5366e 003.0912e 01-8.2926e 016.3798e 013.7577e 02-1.6435e 03s11-2.9882e-01-5.4257e 004.0831e 01-1.5997e 024.0687e 02-7.2117e 029.2064e 02s12-2.4509e 006.6805e 00-1.4430e 012.2815e 01-2.6265e 012.2214e 01-1.3924e 01面号a18a20a22a24a26a28a30s1-3.6910e 001.8356e 00-6.6964e-011.7350e-01-3.0169e-023.1523e-03-1.4942e-04s2-1.2754e 052.3075e 05-2.9916e 052.7072e 05-1.6224e 055.7811e 04-9.2657e 03s38.1424e 05-1.9737e 063.4221e 06-4.1362e 063.3078e 06-1.5719e 063.3586e 05s4-1.9015e 091.1912e 10-5.3155e 101.6469e 11-3.3632e 114.0667e 11-2.2032e 11s53.1138e 09-1.9877e 109.0510e 10-2.8670e 116.0006e 11-7.4575e 114.1662e 11s6-2.3690e 081.0130e 09-3.0789e 096.4812e 09-8.9675e 097.3236e 09-2.6703e 09s71.4490e 07-4.2651e 078.9843e 07-1.3172e 081.2738e 08-7.2864e 071.8623e 07s81.1836e 05-1.9901e 052.3940e 05-2.0054e 051.1098e 05-3.6444e 045.3737e 03s9-7.8481e 038.1470e 03-5.8494e 032.7477e 03-7.5185e 028.6452e 011.8938e 00s103.4981e 03-4.7538e 034.3683e 03-2.7150e 031.0968e 03-2.6035e 022.7581e 01s11-8.5937e 025.8787e 02-2.9161e 021.0211e 02-2.3931e 013.3678e 00-2.1510e-01s126.4904e 00-2.2407e 005.6488e-01-1.0101e-011.2134e-02-8.7782e-042.8896e-05
[0114]
表4
[0115]
图7示出了例子二的成像系统的轴上色差曲线,其表示不同波长的光线经由成像系统后的会聚焦点偏离。图8示出了例子二的成像系统的象散曲线,其表示子午像面弯曲和弧矢像面弯曲。图9示出了例子二的成像系统的畸变曲线,其表示不同视场角对应的畸变大小值。图10示出了例子二的成像系统的倍率色差曲线,其表示光线经由成像系统后在成像面上的不同像高的偏差。
[0116]
根据图7至图10可知,例子二所给出的成像系统能够实现良好的成像品质。
[0117]
例子三
[0118]
如图11至图15所示,描述了本技术例子三的成像系统。图11示出了例子三的成像系统结构的示意图。
[0119]
如图11所示,成像系统由物体侧至成像侧依序包括:第一镜片e1、第二镜片e2、光阑sto、第三镜片e3、第四镜片e4、第五镜片e5、第六镜片e6、滤光片e7和成像面s15。
[0120]
第一镜片e1具有负光焦度,第一镜片的物体侧面s1为凹面,第一镜片的成像侧面s2为凹面。第二镜片e2具正光焦度,第二镜片的物体侧面s3为凸面,第二镜片的成像侧面s4为凹面。第三镜片e3具有正光焦度,第三镜片的物体侧面s5为凸面,第三镜片的成像侧面s6为凸面。第四镜片e4具有负光焦度,第四镜片的物体侧面s7为凹面,第四镜片的成像侧面s8为凹面。第五镜片e5具有正光焦度,第五镜片的物体侧面s9为凸面,第五镜片的成像侧面s10为凸面。第六镜片e6具有负光焦度,第六镜片的物体侧面s11为凸面,第六镜片的成像侧面s12为凹面。滤光片e7具有滤光片的物体侧面s13和滤光片的成像侧面s14。来自物体的光依序穿过各表面s1至s14并最终成像在成像面s15上。
[0121]
在本例子中,成像系统的总有效焦距f为2.23mm,成像系统的最大视场角fov为123.51
°
,成像系统的总长ttl为5.10mm以及像高imgh为3.03mm。
[0122]
表5示出了例子三的成像系统的基本结构参数表,其中,曲率半径、厚度/距离的单位均为毫米(mm)。
[0123][0124]
表5
[0125]
表6示出了可用于例子三中各非球面镜面的高次项系数,其中,各非球面面型可由上述例子一中给出的公式(1)限定。
[0126]
面号a4a6a8a10a12a14a16s14.4330e-01-6.0224e-016.4838e-01-4.9084e-012.2795e-01-5.8575e-026.4064e-03s29.4174e-01-9.8376e-01-6.5351e-016.5851e 00-1.4356e 011.3037e 01-4.2698e 00s31.3719e-01-4.8621e-018.0653e-01-1.6552e-01-2.7591e 004.5205e 00-1.8378e 00s41.2731e-01-4.2448e-015.2101e 00-2.9078e 011.0824e 02-2.1810e 022.0186e 02s53.0337e-02-2.2842e-012.3958e 00-1.5301e 014.1363e 012.9838e 00-3.1639e 02s6-5.0589e-019.0604e-01-4.1771e 001.5470e 01-4.4453e 018.6078e 01-9.4451e 01s7-9.8364e-011.7141e 00-3.7859e 005.9764e 00-8.8279e-01-2.0795e 015.0464e 01s8-5.1292e-019.8492e-01-1.6433e 003.4756e 00-8.3529e 001.5008e 01-1.6445e 01s9-1.4375e-013.1354e-01-2.7958e-013.6621e-01-1.5400e 003.5388e 00-4.0805e 00s10-2.1553e-019.1581e-01-2.0445e 003.5753e 00-4.3595e 003.5588e 00-1.8041e 00s11-7.5204e-011.0487e 00-1.4054e 001.4089e 00-9.5934e-013.7977e-01-6.0642e-02s12-2.4309e-012.4720e-01-1.9379e-011.0653e-01-3.9951e-029.8236e-03-1.4965e-03面号a18a20a22a24a26a28a30s10.0000e 000.0000e 000.0000e 000.0000e 000.0000e 000.0000e 000.0000e 00s20.0000e 000.0000e 000.0000e 000.0000e 000.0000e 000.0000e 000.0000e 00s30.0000e 000.0000e 000.0000e 000.0000e 000.0000e 000.0000e 000.0000e 00s40.0000e 000.0000e 000.0000e 000.0000e 000.0000e 000.0000e 000.0000e 00s57.5624e 02-5.7779e 020.0000e 000.0000e 000.0000e 000.0000e 000.0000e 00s63.8693e 011.1869e 010.0000e 000.0000e 000.0000e 000.0000e 000.0000e 00s7-4.6720e 011.4446e 010.0000e 000.0000e 000.0000e 000.0000e 000.0000e 00s89.8451e 00-2.4530e 000.0000e 000.0000e 000.0000e 000.0000e 000.0000e 00s92.3598e 00-5.5391e-010.0000e 000.0000e 000.0000e 000.0000e 000.0000e 00s105.0376e-01-5.8810e-020.0000e 000.0000e 000.0000e 000.0000e 000.0000e 00s11-5.1458e-032.0039e-030.0000e 000.0000e 000.0000e 000.0000e 000.0000e 00
s121.2649e-04-4.4586e-060.0000e 000.0000e 000.0000e 000.0000e 000.0000e 00
[0127]
表6
[0128]
图12示出了例子三的成像系统的轴上色差曲线,其表示不同波长的光线经由成像系统后的会聚焦点偏离。图13示出了例子三的成像系统的象散曲线,其表示子午像面弯曲和弧矢像面弯曲。图14示出了例子三的成像系统的畸变曲线,其表示不同视场角对应的畸变大小值。图15示出了例子三的成像系统的倍率色差曲线,其表示光线经由成像系统后在成像面上的不同像高的偏差。
[0129]
根据图12至图15可知,例子三所给出的成像系统能够实现良好的成像品质。
[0130]
例子四
[0131]
如图16至图20所示,描述了本技术例子四的成像系统。图16示出了例子四的成像系统结构的示意图。
[0132]
如图16所示,成像系统由物体侧至成像侧依序包括:第一镜片e1、第二镜片e2、光阑sto、第三镜片e3、第四镜片e4、第五镜片e5、第六镜片e6、滤光片e7和成像面s15。
[0133]
第一镜片e1具有负光焦度,第一镜片的物体侧面s1为凹面,第一镜片的成像侧面s2为凹面。第二镜片e2具正光焦度,第二镜片的物体侧面s3为凸面,第二镜片的成像侧面s4为凹面。第三镜片e3具有正光焦度,第三镜片的物体侧面s5为凸面,第三镜片的成像侧面s6为凸面。第四镜片e4具有负光焦度,第四镜片的物体侧面s7为凸面,第四镜片的成像侧面s8为凹面。第五镜片e5具有正光焦度,第五镜片的物体侧面s9为凹面,第五镜片的成像侧面s10为凸面。第六镜片e6具有负光焦度,第六镜片的物体侧面s11为凸面,第六镜片的成像侧面s12为凹面。滤光片e7具有滤光片的物体侧面s13和滤光片的成像侧面s14。来自物体的光依序穿过各表面s1至s14并最终成像在成像面s15上。
[0134]
在本例子中,成像系统的总有效焦距f为1.77mm,成像系统的最大视场角fov为124.11
°
,成像系统的总长ttl为5.84mm以及像高imgh为3.06mm。
[0135]
表7示出了例子四的成像系统的基本结构参数表,其中,曲率半径、厚度/距离的单位均为毫米(mm)。
[0136][0137]
表7
[0138]
表8示出了可用于例子四中各非球面镜面的高次项系数,其中,各非球面面型可由上述例子一中给出的公式(1)限定。
[0139]
[0140][0141]
表8
[0142]
图17示出了例子四的成像系统的轴上色差曲线,其表示不同波长的光线经由成像系统后的会聚焦点偏离。图18示出了例子四的成像系统的象散曲线,其表示子午像面弯曲和弧矢像面弯曲。图19示出了例子四的成像系统的畸变曲线,其表示不同视场角对应的畸变大小值。图20示出了例子四的成像系统的倍率色差曲线,其表示光线经由成像系统后在成像面上的不同像高的偏差。
[0143]
根据图17至图20可知,例子四所给出的成像系统能够实现良好的成像品质。
[0144]
综上,例子一至例子四分别满足表9中所示的关系。
[0145]
条件式/例子1234fov(
°
)128.82120.04123.51124.11(r1-r2)/f12.272.262.223.15f2/(f3 f5)1.691.572.131.61f6/f40.170.381.140.36(r3 r4)/(r5-r6)1.331.170.821.23(r8 r10)/f0.750.780.720.96(r11 r12)/(r11-r12)1.201.922.821.95dt11/(dt31 dt32)1.521.620.981.59f456/sl1.191.101.921.29f23/(t12 t23)2.493.664.672.69sag52/(sag32-sag12)1.151.220.801.10(et1 et4)/(ct1 ct4)1.501.281.611.53ct5/et53.943.802.433.25
[0146]
表10给出了例子一至例子四的成像系统的有效焦距f,各镜片的有效焦距f1至f6等。
[0147]
参数/例子1234f1(mm)-3.36-2.34-3.70-3.21f2(mm)7.535.179.456.52f3(mm)3.132.222.492.66f4(mm)-9.02-3.79-3.48-5.37f5(mm)1.331.071.941.39f6(mm)-1.50-1.42-3.95-1.92f(mm)1.851.442.231.77ttl(mm)6.354.905.105.84imgh(mm)3.292.363.033.06
[0148]
表10
[0149]
本技术还提供一种成像装置,其电子感光元件可以是感光耦合元件(ccd)或互补性氧化金属半导体元件(cmos)。成像装置可以是诸如数码相机的独立成像设备,也可以是集成在诸如手机等移动电子设备上的成像模块。该成像装置装配有以上描述的成像系统。
[0150]
显然,上述所描述的实施例仅仅是本实用新型一部分的实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都应当属于本实用新型保护的范围。
[0151]
需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本技术的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、工作、器件、组件和/或它们的组合。
[0152]
需要说明的是,本技术的说明书和权利要求书及上述附图中的术语“第一”、“第二”等是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本技术的实施方式能够以除了在这里图示或描述的那些以外的顺序实施。
[0153]
以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
