1.本实用新型属于汽车零部件技术领域,更具体地说,是涉及一种汽车悬架结构。
背景技术:
2.目前市场上乘用车后悬架采用性价比较高的扭力梁非独立悬架依旧是主流,为了兼顾操稳和舒适性,扭转刚度是扭力梁设计的关键,绝大多数主机厂横梁设计为的开口梁 扭杆,通过调整扭杆改变扭力梁总成的扭转刚度,或者采用变截面闭口梁,通过改变横梁截面调整扭转刚度,新项目重新配合扭转刚度,扭力梁横梁结构及扭杆杆径需重新设计。现有技术的缺陷的是,扭力梁及扭力梁悬架不能根据车辆运动工况进行适应性调整扭转刚度以提高不同的侧倾性能,且目前扭力梁悬架左右轮运动会相互牵制,影响舒适性能,新项目匹配时,需要重新对扭力梁的结构进行设计,其周期较长,开模成本较高。
技术实现要素:
3.本实用新型所要解决的技术问题是:提供一种结构简单,能够根据路况以及车辆行驶的工况进行自适应性调节扭力梁自身的扭转刚度,控制左右轮的相互牵制程度,实现低速无侧倾情况下扭力梁不提供扭转刚度,提高舒适性能,在高速或侧倾工况提供合适的扭转刚度进行侧倾控制,兼顾操稳及安全性能,提高整车性能的汽车悬架结构。
4.要解决以上所述的技术问题,本实用新型采取的技术方案为:
5.本实用新型为一种汽车悬架结构,所述的汽车悬架结构包括左半模块、右半模块,左半模块和右半模块通过扭矩器连接,左半模块的左梁与左法兰盘连接,左法兰盘与扭矩器一侧连接,限位环通过铆压方式与左梁连接,左带轴承支座压装至左限位环位置,右半模块的右梁与右法兰盘连接,右法兰盘与扭矩器另一侧连接,右梁上的右带轴承支座压装至右限位环位置。
6.所述的扭矩器与电控单元连接。
7.所述的左半模块还包括左纵向推杆安装件、左制动器安装件、左减振器安装件、左横向推杆安装件、左弹簧托盘。
8.所述的右半模块还包括右纵向推杆安装件、右制动器安装件、右减振器安装件、右横向推杆安装件、右弹簧托盘。
9.所述的左纵向推杆安装件上安装左纵向推杆,左纵向推杆另一端与车身连接,左横向推杆安装件上安装左横向推杆,左横向推杆另一端与车身连接。
10.所述的右纵向推杆安装件上安装右纵向推杆,右纵向推杆另一端与车身连接,右横向推杆安装件上安装右横向推杆,右横向推杆另一端与车身连接。
11.所述的左半模块的左带轴承支座与车身连接,左减振器安装件连接左减震器,左弹簧托盘上安装左弹簧。
12.所述的右半模块的右带轴承支座与车身连接,右减振器安装件连接右减震器,右弹簧托盘上安装右弹簧。
13.所述的电控单元连接车辆传感器,车辆传感器设置为能够识别路面情况及行驶工况,并将路面情况及行驶工况信号转化输入给电控单元的结构,电控单元设置为能够对信号处理后对扭矩器进行控制,对左半模块和右半模块之间的扭转刚度进行调整的结构。
14.本实用新型还涉及一种步骤简单,能够根据路况以及车辆行驶的工况进行自适应性调节扭力梁自身的扭转刚度,控制左右轮的相互牵制程度,实现低速无侧倾情况下扭力梁不提供扭转刚度,提高舒适性能,在高速或侧倾工况提供合适的扭转刚度进行侧倾控制,兼顾操稳及安全性能,提高整车性能的汽车悬架结构控制方法。
15.所述的汽车悬架结构控制方法的控制步骤为:
16.s1.电控单元连接车辆传感器,车辆传感器能够识别路面情况及行驶工况,并将路面情况及行驶工况信号转化输入给电控单元;
17.s2.电控单元对路面情况及行驶工况信号处理后对扭矩器进行控制,对左半模块和右半模块之间的扭转刚度进行调整;
18.s3.当车辆低速通过扭曲凹坑路面时,电控单元控制扭矩器不提供扭矩,左半模块和右半模块独立运动,提升舒适性能;当车辆高速通过弯道时,电控单元控制扭矩器提供扭矩,控制车辆侧倾程度,提升稳定性和安全性。
19.采用本实用新型的技术方案,工作原理及有益效果如下所述:
20.本实用新型所述的汽车悬架结构及其控制方法,在结构上主要由左半模块、右半模块组成(左半模块与右半模块完全对称)。这样,左半模块与右半模块通过扭矩器连接,通过电控扭矩器对左右模块进行断开、一定程度结构或完全结合,对扭力梁扭转刚度从0至极限扭转刚度自适应调节。进行连接及控制时,电控单元连接车辆传感器,车辆传感器能够识别路面情况及行驶工况,并将路面情况及行驶工况信号转化输入给电控单元;电控单元对路面情况及行驶工况信号处理后对扭矩器进行控制,对左半模块和右半模块之间的扭转刚度进行调整;当车辆低速通过扭曲凹坑路面时,电控单元控制扭矩器不提供扭矩,左半模块和右半模块独立运动,提升舒适性能;当车辆高速通过弯道时,电控单元控制扭矩器提供扭矩,控制车辆侧倾程度,提升稳定性和安全性。本实用新型的汽车悬架结构及其控制方法,操控可靠,能够根据路况以及车辆行驶的工况进行自适应性调节扭力梁自身的扭转刚度,控制左右轮的相互牵制程度,实现低速无侧倾情况下,比如:过扭曲路面或者凹坑等,扭力梁不提供扭转刚度,提高舒适性能,在高速或侧倾工况时,则提供合适的扭转刚度进行侧倾控制,兼顾操稳及安全性能。另外,本电控扭力梁自身的扭转刚度主要是靠扭矩器进行控制提供,新项目配合及调校时只需进行电控程序调节即可,减少调校周期及新开横梁的模具开发周期,在开发成本及周期上有明显优势。
附图说明
21.下面对本说明书各附图所表达的内容及图中的标记作出简要的说明:
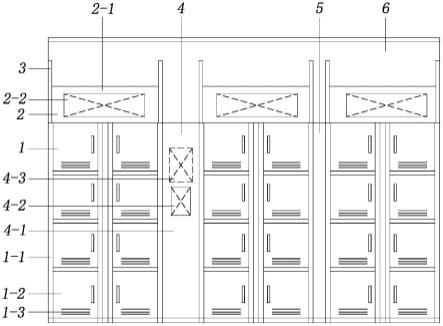
22.图1为本实用新型所述的汽车悬架结构的结构示意图;
23.图2为本实用新型所述的汽车悬架结构的另一角度的结构示意图;
24.附图中标记分别为:1、左梁;2、左带轴承支座;3、左纵向推杆安装件; 4、左制动器安装件;5、左减振器安装件;6、左横向推杆安装件;7、左弹簧托盘;8、螺栓;9、扭矩器;10、左法兰盘;11、限位环;12、电控单元;13、左半模块;14、右半模块;15、左纵向推杆;16、左横向
推杆;17、左减震器; 18、左弹簧。
具体实施方式
25.下面对照附图,通过对实施例的描述,对本实用新型的具体实施方式如所涉及的各构件的形状、构造、各部分之间的相互位置及连接关系、各部分的作用及工作原理等作进一步的详细说明:
26.如附图1-附图2所示,本实用新型为一种汽车悬架结构,所述的汽车悬架结构包括左半模块13、右半模块14,左半模块13和右半模块14通过扭矩器9 连接,左半模块13的左梁1与左法兰盘10连接,左法兰盘10与扭矩器9一侧连接,限位环11通过铆压方式与左梁1连接,左带轴承支座2压装至左限位环 11位置,右半模块14的右梁与右法兰盘连接,右法兰盘与扭矩器9另一侧连接,右梁上的右带轴承支座压装至右限位环位置。上述结构,针对现有技术中的不足,基于独特巧妙的构思,提出全新的技术方案。汽车悬架结构在结构上主要由左半模块、右半模块组成(左半模块与右半模块完全对称)。这样,左半模块与右半模块通过扭矩器连接,通过电控扭矩器对左右模块进行断开、一定程度结构或完全结合,对扭力梁扭转刚度从0至极限扭转刚度自适应调节。进行连接及控制时,电控单元12连接车辆传感器,车辆传感器能够识别路面情况及行驶工况,并将路面情况及行驶工况信号转化输入给电控单元12;电控单元12对路面情况及行驶工况信号处理后对扭矩器9进行控制,对左半模块13和右半模块14之间的扭转刚度进行调整;当车辆低速通过扭曲凹坑路面时,电控单元12 控制扭矩器9不提供扭矩,左半模块13和右半模块14独立运动,提升舒适性能;当车辆高速通过弯道时,电控单元12控制扭矩器9提供扭矩,控制车辆侧倾程度,提升稳定性和安全性。本实用新型的汽车悬架结构,能够根据路况以及车辆行驶的工况进行自适应性调节扭力梁自身的扭转刚度,控制左右轮的相互牵制程度,实现低速无侧倾情况下,比如:过扭曲路面或者凹坑等,扭力梁不提供扭转刚度,提高舒适性能,在高速或侧倾工况时,则提供合适的扭转刚度进行侧倾控制,兼顾操稳及安全性能。另外,本电控扭力梁自身的扭转刚度主要是靠扭矩器进行控制提供,新项目配合及调校时只需进行电控程序调节即可,减少调校周期及新开横梁的模具开发周期,在开发成本及周期上有明显优势。
27.所述的扭矩器9与电控单元12连接,上述结构,扭矩器一方面用于连接左半模块和右半模块,同时根据电控单元的信号调节扭矩。
28.所述的左半模块13还包括左纵向推杆安装件3、左制动器安装件4、左减振器安装件5、左横向推杆安装件6、左弹簧托盘7。所述的右半模块14还包括右纵向推杆安装件、右制动器安装件、右减振器安装件、右横向推杆安装件、右弹簧托盘。所述的左纵向推杆安装件3上安装左纵向推杆15,左纵向推杆15 另一端与车身连接,左横向推杆安装件6上安装左横向推杆16,左横向推杆16 另一端与车身连接。上述结构,左半模块和右半模块对称设置。
29.所述的右纵向推杆安装件上安装右纵向推杆,右纵向推杆另一端与车身连接,右横向推杆安装件上安装右横向推杆,右横向推杆另一端与车身连接。所述的左半模块13的左带轴承支座2与车身连接,左减振器安装件5连接左减震器17,左弹簧托盘7上安装左弹簧18。
30.所述的右半模块14的右带轴承支座与车身连接,右减振器安装件连接右减震器,右弹簧托盘上安装右弹簧。
31.所述的电控单元12连接车辆传感器,车辆传感器设置为能够识别路面情况及行驶工况,并将路面情况及行驶工况信号转化输入给电控单元12的结构,电控单元12设置为能够对信号处理后对扭矩器9进行控制,对左半模块13和右半模块14之间的扭转刚度进行调整的结构。上述结构,电控单元根据车辆传感器信号控制扭矩器动作。
32.本实用新型还涉及一种步骤简单,能够根据路况以及车辆行驶的工况进行自适应性调节扭力梁自身的扭转刚度,控制左右轮的相互牵制程度,实现低速无侧倾情况下扭力梁不提供扭转刚度,提高舒适性能,在高速或侧倾工况提供合适的扭转刚度进行侧倾控制,兼顾操稳及安全性能,提高整车性能的汽车悬架结构控制方法。
33.所述的汽车悬架结构控制方法的控制步骤为:
34.s1.电控单元12连接车辆传感器,车辆传感器能够识别路面情况及行驶工况,并将路面情况及行驶工况信号转化输入给电控单元12;s2.电控单元12对路面情况及行驶工况信号处理后对扭矩器9进行控制,对左半模块13和右半模块14之间的扭转刚度进行调整;s3.当车辆低速通过扭曲凹坑路面时,电控单元12控制扭矩器9不提供扭矩,左半模块13和右半模块14独立运动,提升舒适性能;当车辆高速通过弯道时,电控单元12控制扭矩器9提供扭矩,控制车辆侧倾程度,提升稳定性和安全性。上述步骤,控制方式为:通过车辆传感器识别路面情况及行驶工况,将信号转化输入给电控单元,电控单元处理后对扭矩器进行控制,对左半模块和右模块之间的扭转刚度进行自适应调整。举例:当车辆低速过扭曲凹坑路面,扭矩器不提供扭矩,左右两侧可独立运动,提升舒适性能,当高速过弯时,扭矩器提供扭矩,控制车辆侧倾程度,提升稳定性和安全性,扭矩器提供的扭矩大小根据驾驶工况(路面、侧向加速度、轮速等) 进行自主调整。
35.本实用新型所述的结构中,悬架左右分别安装有纵向推杆,另一端与车身连接,用以承担纵向力;悬架左右分别安装有横向推杆,另一端与车身连接,用以承担侧向力;电控扭力梁上的带轴承支座与车身连接。悬架依旧安装有减振器和弹簧。这样,有效实现本实用新型的效果。
36.本实用新型所述的汽车悬架结构及其控制方法,在结构上主要由左半模块、右半模块组成(左半模块与右半模块完全对称)。这样,左半模块与右半模块通过扭矩器连接,通过电控扭矩器对左右模块进行断开、一定程度结构或完全结合,对扭力梁扭转刚度从0至极限扭转刚度自适应调节。进行连接及控制时,电控单元连接车辆传感器,车辆传感器能够识别路面情况及行驶工况,并将路面情况及行驶工况信号转化输入给电控单元;电控单元对路面情况及行驶工况信号处理后对扭矩器进行控制,对左半模块和右半模块之间的扭转刚度进行调整;当车辆低速通过扭曲凹坑路面时,电控单元控制扭矩器不提供扭矩,左半模块和右半模块独立运动,提升舒适性能;当车辆高速通过弯道时,电控单元控制扭矩器提供扭矩,控制车辆侧倾程度,提升稳定性和安全性。本实用新型的汽车悬架结构及其控制方法,操控可靠,能够根据路况以及车辆行驶的工况进行自适应性调节扭力梁自身的扭转刚度,控制左右轮的相互牵制程度,实现低速无侧倾情况下,比如:过扭曲路面或者凹坑等,扭力梁不提供扭转刚度,提高舒适性能,在高速或侧倾工况时,则提供合适的扭转刚度进行侧倾控制,兼顾操稳及安全性能。另外,本电控扭力梁自身的扭转刚度主要是靠扭矩器进行控制提供,新项目配合及调校时只需进行电控程序调节即可,减少调校周期及新开横梁的模具开发周期,在开发成本及周期上有明显优势。
37.上面结合附图对本实用新型进行了示例性的描述,显然本实用新型具体的实现并不受上述方式的限制,只要采用了本实用新型的方法构思和技术方案进行的各种改进,或未经改进将本实用新型的构思和技术方案直接应用于其他场合的,均在本实用新型的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。