一种用于判断多陷阱rtn信号中陷阱数的方法
技术领域
1.本发明涉及电子信息技术领域,尤其涉及到一种用于判断多陷阱rtn信号中陷阱数的方法。
背景技术:
2.近几年来集成电路已发展到纳米时代,随着器件尺寸的不断减小,因陷阱产生的可靠性问题更为显著。目前在mos晶体管中的可测的噪声中,随机电报噪声(rtn)占据60%以上,尤其在短沟道器件中rtn更为明显。
3.mos器件的rtn是由于栅氧化层中的单个陷阱随时间不断俘获/释放载流子造成的,在沟道中形成载流子的运动,引起管子阈值电压以及漏端电流等参数随时间的大幅波动,直接表现为高低态的随机分布,是mosfet中重要的动态变化源之一。rtn是低频噪声的主要成分,早期认为其主要影响模拟、射频电路,但是随着器件特征尺寸的不断缩小,rtn及其引起的阈值漂移涨落随之加剧,其对数字电路的影响也越发重要,尤其是在先进逻辑器件以及新兴存储器件中。rtn使得器件沟道中载流子数目发生涨落的概率越来越大,在很大程度上降低了元器件的可靠性,并限制了集成电路朝着微型化方向发展的步伐。
4.当器件中有多个陷阱参与捕获/释放载流子时,测得的rtn会显示出2个以上的态。在分析多陷阱rtn时,为了能准确提取rtn及其参数,确定陷阱数量是非常必要的。
5.现有技术准则在应用于hmm提取判断合适陷阱个数时,对于一些复杂多陷阱情况并无法很好的区分。对于比较典型的rtn,可以根据态数量粗略推断出陷阱数量,然而存在陷阱耦合时,态数量到陷阱数量的判据变得不再准确。对于一些复杂非典型的rtn,用bic准则在一定程度上能较为准确地选出最合适的陷阱个数模型,但bic准则并不能够全覆盖地准确判断陷阱数量,个别情况下bic准则选出的陷阱个数模型会与实际矛盾(模拟的两陷阱归一化rtn如图1所示,其bic值随陷阱数的趋势图如图2所示)。
6.因此,我们有必要对现有的方法进行改善,以克服上述缺陷。
技术实现要素:
7.本发明的目的是提供一种用于判断多陷阱rtn信号中陷阱数的方法,通过小波分解和高斯判断,在保证覆盖率的前提下对rtn信号的hmm模型做到了准确拟合,随后分析提取前后相减所得剩余信号与高斯信号的拟合程度,以此来判断合适的陷阱数。本发明判断陷阱数时的准确率比之前的已知方法高,能覆盖到大部分测到的rtn信号。
8.本发明的上述技术目的是通过以下技术方案实现的:
9.一种用于判断多陷阱rtn信号中陷阱数的方法,包括如下步骤:
10.s1.在陷阱数量范围[m,n](n》m)内的值u进行hmm提取;
[0011]
s2.不同陷阱数下所提取的rtn信号为yu(k),k=1,2,3
…
;
[0012]
s3.对所测rtn信号减去hmm提取,即z(k)=x(k)-yu(k),k=1,2,3
…
;进行小波变换,用直方图统计小波系数的分布,利用峰度公式和偏度公式提取小波系数分布的峰度k和
偏度s,并设定阈值进行高斯判别;若所测数据的峰度偏度绝对值同时满足小于阈值条件时为高斯信号,并记录其量化值|k| |s|,否则为非高斯信号;
[0013]
s4.对不同u下的高斯量化值进行排序比较,得最小值|k| |s|对应的陷阱数p。
[0014]
进一步的,所述步骤s3中的峰度公式和偏度公式分别为和
[0015]
进一步的,画出所测时间序列的直方图,观察其态数量,当态数量在范围(2
k-1
,2k]内时,则其陷阱数量为k,陷阱数范围为[m,n]=[k-2,k 2](n》m且m》1);
[0016]
搜寻陷阱数范围方法如下:
[0017]
输入:所测时间序列x(k),k=1,2,3
…
[0018]
输出:所测时间序列直方图分布图,态数量,陷阱数量范围[m,n]。
[0019]
进一步的,找到陷阱数范围后,在设定的陷阱数下进行hmm提取,再对所测时间序列减去提出的纯rtn进行高斯判断,若为高斯信号,则记录其高斯量化值,并在范围内移动陷阱数量进入下一次提取;若不是高斯信号,则直接进入下一次提取。结束陷阱数范围内的所有提取后,将量化值进行排序,最小高斯量化值所对应的陷阱数即为最合适的hmm模型;
[0020]
陷阱数判断的算法如下:
[0021]
输入:所测时间序列x(k),k=1,2,3
…
和陷阱数量范围[m,n](n》m)
[0022]
输出:最合适的陷阱数p。
[0023]
综上所述,本发明具有以下有益效果:
[0024]
本发明通过小波分解和高斯判断,在保证覆盖率的前提下对rtn信号的hmm模型做到了准确拟合,随后分析提取前后相减所得剩余信号与高斯信号的拟合程度,以此来判断合适的陷阱数。本发明判断陷阱数时的准确率比之前的已知方法高,能覆盖到大部分测到的rtn。
附图说明
[0025]
图1是模拟的两陷阱带噪声归一化rtn1信号。
[0026]
图2是模拟的两陷阱带噪声rtn1信号bic值随陷阱数变化的趋势图。
[0027]
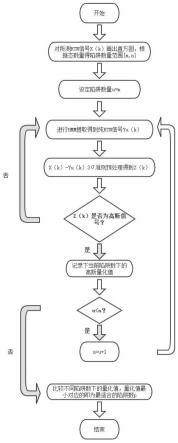
图3是本发明提供的基于高斯判断的陷阱数判断方法的流程框图。
[0028]
图4是模拟的两陷阱带有噪声的归一化rtn2信号。
[0029]
图5是模拟的两陷阱带有噪声的rtn2信号的bic值,高斯量化值随陷阱数变化的趋势图。
[0030]
图6是模拟的两陷阱带有噪声的归一化rtn3信号。
[0031]
图7是模拟的两陷阱带有噪声的rtn3信号的bic值,高斯量化值随陷阱数变化的趋势图。
[0032]
图8是实测的带噪声漏电流序列。
[0033]
图9是实测的带噪声漏电流序列的直方图。
[0034]
图10是实测的带噪声漏电流序列高斯量化值随陷阱数变化的趋势图。
具体实施方式
[0035]
为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合图示与具体实施例,进一步阐述本发明。
[0036]
1.整体算法
[0037]
参见图3,本发明提出的一种用于判断多陷阱rtn信号中陷阱数的方法,包括如下步骤:
[0038]
s1.在陷阱数量范围[m,n](n》m)内的值u进行hmm提取
[0039]
s2.不同陷阱数下所提取的rtn为yu(k),k=1,2,3
…
[0040]
s3.对z(k)=x(k)-yu(k),k=1,2,3
…
用3σ准则作预处理去掉局部无用值,在用db3小波分解5层,取中间2层小波系数进行统计分析,利用峰度公式和偏度公式计算小波系数的分布的峰度k和偏度s,若|k|《0.5且|s|》0.25,则为高斯信号,记录其量化值|k| |s|。
[0041]
s4.对不同u下的高斯量化值进行排序比较,得最小值|k| |s|对应的陷阱数p。
[0042]
2.高斯判断
[0043]
标准高斯信号的特征,偏度和峰度都接近0。
[0044]
对所测rtn信号减去hmm提取后的进行小波变换,用直方图统计小波系数的分布,利用如下峰度和偏度公式提取小波系数分布的特征,设定阈值进行高斯判别(例如峰度阈值为0.5,偏度阈值为0.25)。所测数据的峰度偏度绝对值同时满足小于阈值条件时为高斯信号,否则为非高斯信号。
[0045]
如果陷阱数下对所测时间序列的提取拟合的较好,则所测时间序列减去提出的纯rtn应为高斯信号,且不同陷阱数下,拟合得最好的高斯量化值最小。
[0046]
峰度公式:
[0047]
偏度公式:
[0048]
3.确定陷阱数搜寻范围
[0049]
画出所测时间序列的直方图,观察其态数量,当态数量在范围(2
k-1
,2k]内时,则其陷阱数量为k,陷阱数范围为[m,n]=[k-2,k 2](n》m且m》1)。
[0050]
搜寻陷阱数范围方法如下:
[0051]
输入:所测时间序列x(k),k=1,2,3
…
[0052]
输出:所测时间序列直方图分布图,态数量,陷阱数量范围[m,n]
[0053]
4.不同陷阱数下进行高斯判别及高斯量化值比较
[0054]
找到陷阱数范围后,便可以在设定的陷阱数下进行hmm提取,再对所测时间序列减去提出的纯rtn进行高斯判断,若为高斯信号,则记录其高斯量化值,并在范围内移动陷阱数量进入下一次提取;若不是高斯信号,则直接进入下一次提取。结束陷阱数范围内的所有提取后,将量化值进行排序,最小高斯量化值所对应的陷阱数即为最合适的hmm模型。
[0055]
陷阱数判断的算法如下:
[0056]
输入:所测时间序列x(k),k=1,2,3
…
和陷阱数量范围[m,n](n》m)
[0057]
输出:最合适的陷阱数p
[0058]
实施例
[0059]
(1)选取实测含rtn的电流序列为例(图8所示),绘制其直方图(图9所示)。
[0060]
(2)得到该序列的态数量为4,推断其陷阱数量2,搜寻陷阱数量范围为[1,4]。设定陷阱数u=1,对x(k)进行hmm提取得到yu(k),x(k)-yu(k)用3准则作预处理去掉局部无用值,在用db3小波基分解5层,取中间2层小波低频系数进行统计分析,利用峰度公式和偏度公式计算小波系数的分布的峰度k=-1.572286和偏度s=0.347720,不满足阈值要求k|《0.5且|s|》0.25,说明提取后的剩余信号非高斯信号。进行u=2时hmm提取,得其峰度k=0.003728和偏度s=0.199980,满足高斯阈值要求,记录高斯量化值0.203708。进行u=3时hmm提取,得其峰度k=0.112080和偏度s=0.114071,满足高斯阈值要求,记录高斯量化值0.226151。进行u=4时hmm提取,得其峰度k=-1.194817和偏度s=0.269338,不满足阈值要求,说明提取后的剩余信号非高斯信号。(高斯量化值随陷阱数的趋势图如图10所示)
[0061]
(3)最小高斯量化值所对应的陷阱数即为该rtn信号中的陷阱数模型,本实施例中陷阱数=2。
[0062]
本发明通过小波分解和高斯判断,在保证覆盖率的前提下对rtn的hmm模型做到了准确拟合。本发明对模拟的两陷阱rtn信号进行了验证,对于较为典型的rtn(图4),图5展示了本方法与bic方法的一致结果,即在合适的陷阱数时对应最小值。对于复杂rtn(图6),bic准则出错,而本方法依旧可以准确的判断出最优陷阱数,图7所示。从图中可以看出本方法判断陷阱数时的准确率比之前的已知方法高,能覆盖到大部分测到的rtn。
[0063]
在本文中,术语“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”、“竖直”、“水平”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了表达技术方案的清楚及描述方便,因此不能理解为对本发明的限制。
[0064]
在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,除了包含所列的那些要素,而且还可包含没有明确列出的其他要素。
[0065]
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等同物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。