技术特征:
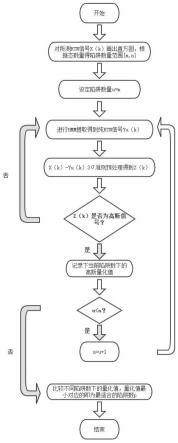
1.一种用于判断多陷阱rtn信号中陷阱数的方法,其特征在于,包括如下步骤:s1.在陷阱数量范围[m,n](n>m)内的值u进行hmm提取;s2.不同陷阱数下所提取的rtn信号为y
u
(k),k=1,2,3
…
;s3.对所测rtn信号减去hmm提取,即z(k)=x(k)-y
u
(k),k=1,2,3
…
;进行小波变换,用直方图统计小波系数的分布,利用峰度公式和偏度公式提取小波系数分布的峰度k和偏度s,并设定阈值进行高斯判别;若所测数据的峰度偏度绝对值同时满足小于阈值条件时为高斯信号,并记录其量化值|k| |s|,否则为非高斯信号;s4.对不同u下的高斯量化值进行排序比较,得最小值|k| |s|对应的陷阱数p。2.根据权利要求1所述的用于判断多陷阱rtn信号中陷阱数的方法,其特征在于,所述步骤s3中的峰度公式和偏度公式分别为和3.根据权利要求1所述的用于判断多陷阱rtn信号中陷阱数的方法,其特征在于,画出所测时间序列的直方图,观察其态数量,当态数量在范围(2
k-1
,2
k
]内时,则其陷阱数量为k,陷阱数范围为[m,n]=[k-2,k 2](n>m且m>1);搜寻陷阱数范围方法如下:输入:所测时间序列x(k),k=1,2,3
…
输出:所测时间序列直方图分布图,态数量,陷阱数量范围[m,n]。4.根据权利要求1所述的用于判断多陷阱rtn信号中陷阱数的方法,其特征在于,找到陷阱数范围后,在设定的陷阱数下进行hmm提取,再对所测时间序列减去提出的纯rtn进行高斯判断,若为高斯信号,则记录其高斯量化值,并在范围内移动陷阱数量进入下一次提取;若不是高斯信号,则直接进入下一次提取。结束陷阱数范围内的所有提取后,将量化值进行排序,最小高斯量化值所对应的陷阱数即为最合适的hmm模型;陷阱数判断的算法如下:输入:所测时间序列x(k),k=1,2,3
…
和陷阱数量范围[m,n](n>m)输出:最合适的陷阱数p。
技术总结
本发明公开了一种用于判断多陷阱RTN信号中陷阱数的方法,首先在陷阱数量范围内的值进行HMM提取;然后对所测RTN信号减去HMM提取后进行小波变换,用直方图统计小波系数的分布,利用峰度和偏度公式提取小波系数分布的峰度和偏度,并设定阈值进行高斯判别;若所测数据的峰度偏度绝对值同时满足小于阈值条件时为高斯信号,并记录其量化值;对不同值下的高斯量化值进行排序比较,得最小值对应的陷阱数。本发明通过小波分解和高斯判断,在保证覆盖率的前提下对RTN信号的HMM模型做到了准确拟合,随后分析提取前后相减所得剩余信号与高斯信号的拟合程度,以此来判断合适的陷阱数。本发明判断陷阱数时的准确率比之前的已知方法高,能覆盖到大部分测到的RTN信号。能覆盖到大部分测到的RTN信号。能覆盖到大部分测到的RTN信号。
技术研发人员:纪志罡 肖雨 任鹏鹏
受保护的技术使用者:上海交通大学
技术研发日:2022.04.01
技术公布日:2022/8/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。