1.本发明属于水下网衣清洗技术领域,具体涉及一种水下网衣爬行清洗装置及其清洗水下网衣的方法。
背景技术:
2.我国海洋水产养殖业迅猛发展,尤其是在外海养殖和半野生化养殖方面有着长足的进步,而无论是何种养殖方式都需要依靠养殖网箱进行,但在网箱养殖过程中,经常会出现大量附着物在网衣上滋生的情况,特别是在春夏季,附着物会阻碍水流的流通和水体交换,容易造成箱内水质的恶化,影响鱼类的生长,同时网衣上附着的藤壶、牡蛎和海藻等会增加网箱的整体重量,降低网箱的浮力效果,给水产养殖带来极大的危害。
3.目前,针对网衣的清洗方法主要有人工潜水清除法、阳光暴晒清除法、生物清除法和化学药剂清除法,但是以上几种清洗方式也存在较为明显的缺点,例如成本高、清理风险大、清洗效果不明显等。近年来市场上出现了一些网箱清洗装置来代替传统的清洗方式,其中现有装置多以履带和螺旋桨为推进方式,以高压水流冲刷网衣或以物理刷盘的方式来进行清洗,这类清洗方法短时间内会产生大量的附着物垃圾,对周围的水质产生较大的影响,而且较大程度的减少了网衣的使用寿命。进一步,由于现有水下清洗网衣的装置均是通过螺旋桨产生的推进力将其压于网衣之上,若网衣上附着有较长长度的海藻或者海带时,容易将其卷进高速旋转的螺旋桨之中,造成运行故障,并且在不使用洗网装置时,需要将其回收,期间投放和回收的过程将耗费相当多的人力和物理,增加了使用成本。总之,这类装置存在洗网污染大,减少网衣使用寿命,机械可靠性不高,不能在水下长期驻守等弊端。
技术实现要素:
4.针对上述问题,本发明提出一种水下网衣爬行清洗装置及其清洗水下网衣的方法,该清洗装置具有集网面爬行、网衣清洗、监测清洗效果、紧急上浮、水下长期驻留功能于一体的优点,具有结构可靠、运行稳定、成本低、清洗效果好、降低劳动强度的特点。
5.本发明采用的技术方案如下:
6.本发明一种水下网衣爬行清洗装置,包括壳体、爬行臂、夹爪、水射流机构、清扫机构、图像监测系统和紧急上浮机构;所述的壳体上部设置有顶盖,且壳体与顶盖之间设置有防水结构;沿壳体周向均布有四个爬行臂;每个爬行臂的末端均固定有一个夹爪;所述的水射流机构、清扫机构和紧急上浮机构均装配在壳体内部,且水射流机构的空化水射流喷头穿出壳体底面,清扫机构的刷盘和毛刷穿出壳体底面开设的槽口,紧急上浮机构的气体入口置于顶盖外。
7.所述的夹爪包括接触手、夹紧手一、夹紧手二、弹簧、外壳、接近开关、电磁铁、磁轴、连杆、固定架和固定条;所述的外壳与爬行臂末端固定连接;所述的固定条与外壳固定连接;所述的固定条上开设有通孔,通孔与磁轴构成滑动副;所述固定架固定在磁轴的上端,位于外壳内部并与固定条平行设置;所述固定架的两端与两个连杆的一端分别铰接;每
个连杆的另一端均铰接有一个滑块;一个滑块与夹紧手一固定连接,另一个滑块与夹紧手二固定连接;所述的固定条上开设有滑槽;两个滑块均与滑槽构成滑动副;所述接触手固定在磁轴的下端,且接触手与固定条之间设置有弹簧;所述的接近开关通过安装板固定在外壳内部,并设置在磁轴一侧上方位置;所述的电磁铁通过支撑座固定在外壳内部;所述的电磁铁与磁轴同轴设置。
8.优选地,所述的防水结构包括密封框架、密封橡胶和密封板;所述的密封框架置于壳体与顶盖之间,且密封框架两侧均固定有密封橡胶;所述的密封框架与顶盖之间的密封橡胶上还固定有密封板。
9.优选地,所述的爬行臂包括舵机一、臂一、舵机二、臂二、舵机三和臂三;所述舵机一的机身与壳体固定连接;所述臂一的一端与舵机一的输出轴固定连接;所述臂一的另一端与舵机二的机身固定连接;所述舵机二的输出轴与臂二的一端通过金属支架固定连接;所述臂二的另一端与舵机三的机身固定连接;所述舵机三的输出轴与臂三的一端固定连接;所述臂三的另一端为爬行臂末端,与夹爪的外壳固定连接。
10.更优选地,所述的舵机一上设置有防水外壳一,舵机二上设置有防水外壳二,舵机三上设置有防水外壳三。
11.优选地,所述的水射流机构包括空化水射流喷头、喷头安装架、喷头转接口和供水管;两个喷头安装架间距固定在壳体内,每个喷头安装架上间距固定有多个空化水射流喷头;所述的空化水射流喷头的喷射方向远离顶盖方向设置;各空化水射流喷头均经一个喷头转接口与供水管的输出端连接;所述供水管的输入端与水泵的输出端连接。
12.优选地,本发明还包括吸水机构;所述的吸水机构包括吸水管道、吸水口和过滤网;所述的吸水管道固定在壳体内,输出端与水泵的输入端连接;水泵的输出端处设置有单向阀一;所述的吸水管道设有若干个吸水口;所述的吸水口穿出壳体侧部,且吸水口朝向远离顶盖方向设置;所述的吸水口处固定有过滤网。
13.优选地,所述的清扫机构包括毛刷、刷盘和电机;所述的电机通过电机安装架固定在壳体内部底面上;所述刷盘通过联轴器与电机的输出轴固定连接;所述毛刷固定在刷盘的底面上。
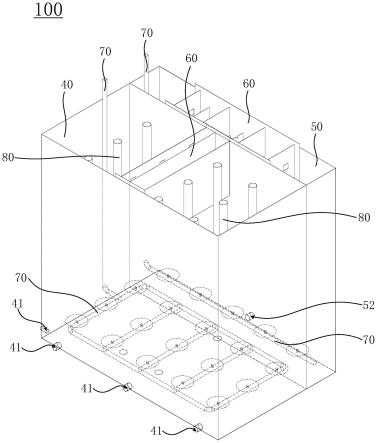
14.优选地,所述的紧急上浮机构包括单向阀二、储气箱、通气接口和通气管道;两个储气箱均与壳体的内壁面固定连接,且两个储气箱对称设置;每个储气箱的上表面均开设有进气孔;每个进气孔处均固定连接有通气接口;两个通气接口通过通气管道连接;每个储气箱的下表面均开设有排水口;每个排水口处均固定有单向阀二;所述通气管道的气体入口与网箱平台上的气罐通过单向阀三和输气管连接。
15.优选地,所述的图像监测系统包括摄像头、防水外壳和防水玻璃罩;所述摄像头固定在壳体的前端,且摄像头外罩有防水外壳,防水外壳与壳体固定;所述防水外壳上开设的矩形开口处固定有防水玻璃罩,防水玻璃罩位于摄像头正前方。
16.本发明一种水下网衣爬行清洗装置清洗水下网衣的方法,具体如下:
17.母船行驶至待清洗网箱上方水域,操作员将水下网衣爬行清洗装置自然下沉至水下;当图像监测系统监测到水下网衣爬行清洗装置即将与网衣接触时,控制器通过调整四个爬行臂的姿态,使四个爬行臂上的夹爪均对准网衣;当夹爪与网衣即将发生接触时,夹爪中的接触手先与网衣接触,并推动网衣在水中缓慢运动,此时接触手处于被压迫状态,弹簧
被压缩,磁轴沿轴向运动并靠近电磁铁,磁轴向上运动的同时拉动两个连杆沿铰接点摆动,带动两个滑块相向滑动,从而使夹紧手一和夹紧手二相向运动并夹紧网衣;当磁轴向上运动至被接近开关检测到时,接近开关将信号传输至控制器,控制器使电磁铁通电,使磁轴被电磁铁牢牢吸附,此时夹紧手一和夹紧手二最大程度的夹紧网衣;当夹爪无需夹紧网衣时,控制器控制电磁铁断电,在弹簧的作用下,带动磁轴复位,使夹紧手一和夹紧手二复位并松开网衣;在无需对网衣进行清洗时,四个爬行臂上的夹爪均牢牢抓紧网衣,水下网衣爬行清洗装置处于待命状态;当需要对网衣进行清洗时,图像监测系统中的摄像头对网衣进行检测,并将检测信号传输至控制器,控制器判断网衣需要被清洗的位置,通过四个爬行臂及四个夹爪反复夹紧、松开的过程实现水下网衣爬行清洗装置在网衣上的运动;当水下网衣爬行清洗装置运动至指定位置后,四个夹爪均夹紧网衣;此时,控制器启动水泵,使吸水机构吸水,并由水射流机构喷出,实现对网衣上污染物的初步清理;同时控制器启动清扫机构,对网衣作进一步清洗,再通过改变四个爬行臂的姿态调整清扫机构的位置实现对网衣当前位置的清洗;其中,水射流机构中空化水射流喷头喷出的空化水射流在网衣附近产生局部爆破力对网衣进行清理,且吸水机构吸水时产生的吸力与水射流机构喷水时产生的推力相互抵消;当完成当前指定位置的清洗后,水下网衣爬行清洗装置前往下一位置继续清洗任务。
18.本发明具有的有益效果是:
19.1、本发明通过爬行臂和夹爪实现水下网衣爬行清洗装置在水下网衣上的爬行运动;通过夹爪上的接触手与网衣接触,推动磁轴向夹爪内滑动,并拉动夹紧手一和夹紧手二相向运动实现夹紧动作;在夹爪内还设置有接近开关和电磁铁,当磁轴接近时能够通过电磁铁将磁轴牢牢吸附,使夹紧手一和夹紧手二始终保持强夹紧状态,有效防止夹爪从网衣上脱落。本发明中的夹爪相较于传统机械手进行了优化,将夹爪与网衣接触时相对运动产生的力作为驱动力,降低了控制精度的要求,且电磁铁吸附磁轴实现夹紧具有一定的可靠性。
20.2、本发明吸水机构中吸水口和水射流机构的空化水射流喷头均朝向远离顶盖方向设置,可以使吸水机构吸水时产生的吸力与水射流机构喷水时产生的推力在一定程度上相互抵消,能使水下网衣爬行清洗装置进行清洗作业保持相对稳定;另外,水射流机构喷出的空化水射流只是在水下网衣附近产生局部爆破力对水下网衣进行清理,不会像现有装置采用的高压水流冲刷网衣方式在短时间内产生大量的附着物垃圾,因此对周围的水质产生的影响较小,对网衣的使用寿命影响也较小;清扫机构通过电机驱动刷盘转动清洗的方式,使经过空化水射流清理后还未掉落的附着物从网衣上掉落。
21.3、本发明相较于传统网衣清洗装置具有能长期驻留水下的优点,只需要通过网箱平台上的电源提供少量电力,控制器即可控制电磁铁一直处于通电状态,让夹爪一直抓住网衣实现驻留,具有耗电量小、续航时间长的优点,经过一次投放后,无需人工进行重复的回收和投放过程,极大的减小了人力消耗;而需要回收时,也能通过紧急上浮机构实现全自动回收,无需人工干预;而紧急上浮机构中对称设置的两个储气箱同时注入空气,保证上浮的稳定性,通过自动注气的方式实现快速上浮,区别于传统通过人工拉拽上浮的方式,减小了对装备的损伤,提高了水下清洗装置的应急反应速度,适合推广应用。
22.4、本发明相较于通过螺旋桨进行水下移动的网衣清洗装置具有噪声小的优点,螺
旋桨在水下运动时会产生较大的噪声,对鱼类的生长环境有一定程度的影响;且螺旋桨在水下运动时极易缠绕水草等杂物,严重时会与鱼类发生碰撞,导致螺旋桨损坏,造成经济损失,而本发明的爬行运动方式极大的减少了在水下环境产生的噪音,且爬行臂配合夹爪的运动方式不会对鱼类造成伤害,也能最大限度的保证机构正常运行。
附图说明
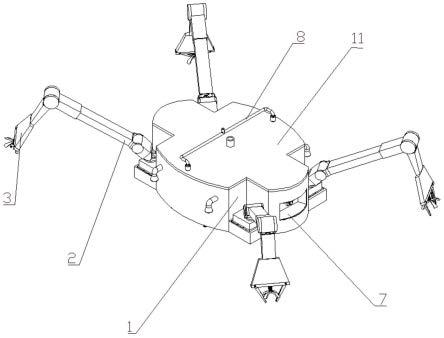
23.图1为本发明的整体结构立体图;
24.图2为本发明的底部结构示意图;
25.图3为本发明去除顶盖之后的内部结构示意图;
26.图4为本发明中爬行臂与夹爪的结构立体图;
27.图5为本发明中夹爪的结构示意图;
28.图6为本发明中水射流机构的结构立体图;
29.图7为本发明中吸水机构的结构立体图;
30.图8为本发明中清扫机构的结构立体图;
31.图9为本发明中紧急上浮机构的结构立体图。
具体实施方式
32.以下结合附图对本发明作进一步说明。
33.本发明一种水下网衣爬行清洗装置,如图1和2所示,包括壳体1、爬行臂2、夹爪3、水射流机构4、清扫机构6、图像监测系统7和紧急上浮机构8;壳体1上部设置有顶盖11,且壳体1与顶盖11之间设置有防水结构9;沿壳体1周向均布有四个爬行臂2;每个爬行臂2的末端均固定有一个夹爪3;如图2和3所示,水射流机构4、清扫机构6和紧急上浮机构8均装配在壳体1内部,且水射流机构4的空化水射流喷头4-1穿出壳体1底面,清扫机构6的刷盘6-2和毛刷6-1穿出壳体1底面开设的槽口,紧急上浮机构8的气体入口置于顶盖11外。
34.如图5所示,夹爪3包括接触手3-1、夹紧手一3-2、夹紧手二3-3、弹簧3-4、外壳3-6、接近开关3-7、电磁铁3-10、磁轴、连杆3-12、固定架和固定条3-5;外壳3-6与爬行臂2末端固定连接;固定条3-5与外壳3-6固定连接;固定条3-5上开设有通孔,通孔与磁轴构成滑动副;固定架固定在磁轴的上端,位于外壳3-6内部并与固定条3-5平行设置;固定架3-11的两端与两个连杆3-12的一端分别铰接;每个连杆3-12的另一端均铰接有一个滑块;一个滑块与夹紧手一3-2固定连接,另一个滑块与夹紧手二3-3固定连接;固定条3-5上开设有滑槽;两个滑块均与滑槽构成滑动副;接触手3-1固定在磁轴的下端,且接触手3-1与固定条3-5之间设置有弹簧3-4;接近开关3-7通过安装板3-8固定在外壳3-6内部,并设置在磁轴一侧上方位置;电磁铁3-10通过支撑座3-9固定在外壳3-6内部;电磁铁3-10与磁轴同轴设置。优选地,夹紧手一3-2和夹紧手二3-3的内侧面均固定有橡胶材质的锯齿结构3-13,保证夹紧手一3-2和夹紧手二3-3抓得更牢。
35.作为一个优选实施例,如图3所示,防水结构9包括密封框架9-1、密封橡胶9-2和密封板9-3;密封框架9-1置于壳体1与顶盖11之间,且密封框架9-1两侧均固定有密封橡胶9-2;密封框架9-1与顶盖11之间的密封橡胶9-2上还固定有密封板9-3,起到进一步密封效果。
36.作为一个优选实施例,如图4所示,爬行臂2包括舵机一2-1、臂一2-3、舵机二2-4、
臂二2-6、舵机三2-8和臂三2-9;舵机一2-1的机身与壳体1固定连接;臂一2-3的一端与舵机一2-1的输出轴固定连接;臂一2-3的另一端与舵机二2-4的机身固定连接;舵机二2-4的输出轴与臂二2-6的一端通过金属支架2-5固定连接;臂二2-6的另一端与舵机三2-8的机身固定连接;舵机三2-8的输出轴与臂三2-9的一端固定连接;臂三2-9的另一端为爬行臂2末端,与夹爪3的外壳3-6固定连接。
37.作为一个更优选实施例,舵机一2-1上设置有防水外壳一2-2,舵机二2-4上设置有防水外壳二2-10,舵机三2-8上设置有防水外壳三2-7。
38.作为一个优选实施例,如图6所示,水射流机构4包括空化水射流喷头4-1、喷头安装架4-2、喷头转接口4-3和供水管4-4;两个喷头安装架4-2间距固定在壳体1内,每个喷头安装架4-2上间距固定有多个空化水射流喷头4-1(或称空化水射流喷嘴,为现有技术,可以产生空化水射流);空化水射流喷头4-1的喷射方向远离顶盖11方向设置;各空化水射流喷头4-1均经一个喷头转接口4-3与供水管4-4的输出端连接;供水管4-4的输入端与水泵10的输出端连接。
39.作为一个更优选实施例,供水管4-4可以是软质橡胶管;软质橡胶管能减少水泵10工作时产生的冲击力。
40.作为一个优选实施例,如图7所示,本发明还包括吸水机构5;吸水机构5包括吸水管道5-1、吸水口5-2和过滤网5-3;吸水管道5-1固定在壳体1内,输出端与水泵10的输入端连接;吸水管道5-1设有若干个吸水口5-2;吸水口5-2穿出壳体1侧部,且吸水口5-2朝向远离顶盖11方向设置;吸水口5-2处固定有过滤网5-3;过滤网5-3能有效防止水中的杂质进入吸水管道内。
41.作为一个更优选实施例,水泵10的输出端处设置有单向阀一,防止水射流机构4中的水回流至吸水机构5中造成吸水机构5损坏。
42.作为一个优选实施例,如图8所示,清扫机构6包括毛刷6-1、刷盘6-2和电机6-5;电机6-5通过电机安装架6-4固定在壳体1内部底面上;刷盘6-2通过联轴器6-3与电机6-5的输出轴固定连接;毛刷6-1固定在刷盘6-2的底面上。
43.作为一个优选实施例,如图9所示,紧急上浮机构8包括单向阀二8-1、储气箱8-2、通气接口8-3和通气管道8-4;两个储气箱8-2均与壳体1的内壁面固定连接,且两个储气箱8-2对称设置;每个储气箱8-2的上表面均开设有进气孔;每个进气孔处均固定连接有通气接口8-3;两个通气接口8-3通过通气管道8-4连接;每个储气箱8-2的下表面均开设有排水口;每个排水口处均固定有单向阀二8-1;单向阀二8-1能防止外部的水回流至储气箱8-2内;通气管道8-4的气体入口与网箱平台上的气罐通过单向阀三和输气管连接。
44.作为一个优选实施例,如图2所示,图像监测系统7包括摄像头7-2、防水外壳7-1和防水玻璃罩7-3;摄像头7-2固定在壳体1的前端,且摄像头7-2外罩有防水外壳7-1,防水外壳7-1与壳体1固定;防水外壳7-1上开设的矩形开口处固定有防水玻璃罩7-3,防水玻璃罩7-3位于摄像头7-2正前方。
45.电机6-5、舵机一2-1、舵机二2-4、舵机三2-8、摄像头7-2、接近开关3-7、电磁铁3-10和水泵10均与控制器连接,电机6-5、舵机一2-1、舵机二2-4、舵机三2-8、电磁铁3-10和水泵10均受控制器控制,此处说明一下,由网箱平台上的电源给本发明进行供电。
46.在上述各项实施例均具备的情况下,本发明一种水下网衣爬行清洗装置清洗水下
网衣的方法,具体如下:
47.母船行驶至待清洗网箱上方水域,操作员将水下网衣爬行清洗装置自然下沉至水下;当图像监测系统7监测到水下网衣爬行清洗装置即将与网衣接触时,控制器通过调整四个爬行臂2的姿态,使四个爬行臂2上的夹爪3均对准网衣;当夹爪3与网衣即将发生接触时,夹爪3中的接触手3-1先与网衣接触,并推动网衣在水中缓慢运动,此时接触手3-1处于被压迫状态,弹簧3-4被压缩,磁轴沿轴向运动并靠近电磁铁3-10,磁轴向上运动的同时拉动两个连杆3-12沿铰接点摆动,带动两个滑块相向滑动,从而使夹紧手一3-2和夹紧手二3-3相向运动并夹紧网衣;当磁轴向上运动至被接近开关3-7检测到时,接近开关3-7将信号传输至控制器,控制器使电磁铁3-10通电,使磁轴被电磁铁3-10牢牢吸附,此时夹紧手一3-2和夹紧手二3-3最大程度的夹紧网衣;当夹爪3无需夹紧网衣时,控制器控制电磁铁3-10断电,在弹簧3-4的作用下,带动磁轴复位,使夹紧手一3-2和夹紧手二3-3复位并松开网衣;在无需对网衣进行清洗时,四个爬行臂2上的夹爪均牢牢抓紧网衣,水下网衣爬行清洗装置处于待命状态;当需要对网衣进行清洗时,图像监测系统7中的摄像头对网衣进行检测,并将检测信号传输至控制器,控制器判断网衣需要被清洗的位置,通过四个爬行臂2及四个夹爪3反复夹紧、松开的过程实现水下网衣爬行清洗装置在网衣上的运动;当水下网衣爬行清洗装置运动至指定位置后,四个夹爪均夹紧网衣;此时,控制器启动水泵10,使吸水机构5吸水,并由水射流机构4喷出,实现对网衣上污染物的初步清理;同时控制器启动清扫机构6,对网衣作进一步清洗,再通过改变四个爬行臂2的姿态调整清扫机构6的位置实现对网衣当前位置的清洗;其中,水射流机构4中空化水射流喷头4-1喷出的空化水射流在网衣附近产生局部爆破力对网衣进行清理,对周围的水质产生的影响小,对网衣的使用寿命影响也较小,且吸水机构吸水时产生的吸力与水射流机构喷水时产生的推力相互抵消,使水下网衣爬行清洗装置进行清洗作业时保持稳定;当完成当前指定位置的清洗后,水下网衣爬行清洗装置前往下一位置继续清洗任务。
48.作为一个优选实施例,网衣清洗完毕后,网箱平台上的电源只需提供少量电力,控制器即可控制电磁铁一直处于通电状态,让夹爪一直抓住网衣实现驻留,不进行回收,具有耗电量小、续航时间长的优点,经过一次投放后,无需人工进行重复的回收和投放过程,极大的减小了人力消耗;而需要回收时,控制电磁铁断电后,通过紧急上浮机构实现全自动回收,无需人工干预。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。