1.本发明属于曲面构件面形测量技术领域,具体涉及一种针对高深宽比曲面构件面形测量的测量系统及方法。
背景技术:
2.高深宽比曲面构件具有灵敏度高、位移量大、纵向有效利用空间广的特点,广泛应用于航空航天、生物医学、环境监控和国防军工等领域。沟槽结构是高深宽比构件的主要结构形式之一,高深宽比曲面构件表面沟槽宽度约为1~10μm,高度为10~500μm,深宽比在10:1到100:1之间,是微机电系统的重要组成部分,推动微机电系统向着低功耗、高性能、多功能的方向发展,有效降低了微机电系统的体积、重量和能耗,提高了系统的集成度,使微结构器件的驱动力、频率范围和灵敏度等性能显著提高。
3.对高深宽比曲面构件的精确测量是实现微结构器件精密加工与应用的基础,加工测量相辅相成。传统的曲面构件面形测量方法是通过白光干涉仪或者原子力显微镜,该方法存在以下几个方面的不足:(1)白光干涉仪测量范围小,纵向测量范围小于10μm,横向测量范围通常小于500μm,需要通过数百次以上的拼接来获得全表面轮廓形貌,受限于拼接精度,测量精度难以得到保障;(2)白光干涉仪的干涉条纹需要垂直于待测面,对于曲面的测量难度较高,且无法测量曲面构件表面的高深宽比微结构;(3)原子力显微镜具有较高的分辨率,但受限于亚接触式的测量模式,扫描效率低,单线扫描速度低于20μm/s,难以快速高效的获取元件的全表面轮廓形貌;(4)原子力显微镜的扫描探针对于深沟槽底部圆角存在探测盲区,无法精确测量。
技术实现要素:
4.本发明针对上述技术问题,本发明综合激光干涉光针在曲面轮廓、无损检测方面的优势以及高长径比扫描触针对大曲率、小间隙结构的检测优势,开发集成了针对高深宽比曲面构件面形测量的测量系统,并优化其测量方法,从而实现复杂高深宽比曲面构件跨尺度特征的全表面检测。
5.本发明的发明目的是通过以下技术方案实现的:
6.一种针对高深宽比曲面构件面形测量的测量系统,其包括:
7.双探头测量机构,其包括激光干涉光针及扫描触针,两者探头间隔设置,并依次对曲面构件进行扫描,其中激光干涉针用于对曲面构件表面轮廓进行扫描,扫描触针用于对曲面构件上的沟槽结构进行扫描;
8.探头驱动机构,其驱动双探头测量机构对曲面构件进行随形扫描,且探头驱动机构能够通过多轴联动使激光干涉光针和扫描触针的探头指向曲面构件表面法相,并作相应角度的正向反向偏转;
9.构件移动机构,其带动待测曲面构件在双针测量机构的测量范围内作回转运动。
10.作为优选,所述双探头测量机构还包括探头夹具,激光干涉光针及扫描触针均安
装在探头夹具上,激光干涉光针及扫描触针的探头背离设置,间隔180度。
11.作为优选,所述探头移动机构包括z轴滑座及滑动设置在z轴滑座上的z轴滑块,该z轴滑块能够在z轴滑座上沿z轴方向往复滑动;z轴滑块上固设有x轴滑座,x轴滑座上滑动设置有x轴滑块,该x轴滑块能够在x轴滑座上沿x轴方向往复滑动;x轴滑块上设有一b轴运动台,该b轴运动台能够绕b轴自转,且b轴平行于y轴。
12.作为优选,所述探头夹具固设在b轴运动台上,且激光干涉光针与扫描触针的探头均沿b轴运动台的径向向外设置,激光干涉光针与扫描触针通过b轴运动台转动实现换位。
13.作为优选,所述构件移动机构包括y轴运动台,y轴运动台能够沿y轴方向往复移动,y轴运动台上设c轴运动台,该c轴运动台能够绕c轴自转,且c轴平行于z轴;c轴运动台上固设有用于固定曲面构件的构件夹具。
14.一种针对高深宽比曲面构件面形测量的测量方法,其包括以下步骤:
15.步骤a,利用激光干涉光针对曲面构件表面进行随形扫描,获取曲面构件表面轮廓信息;
16.步骤b,利用扫描触针对曲面构件表面的沟槽结构进行扫描,获取沟槽内壁结构信息;
17.步骤c,将激光干涉光针扫描数据与扫描触针扫描数据进行拼接,即将步骤a中获得的曲面构件表面轮廓信息与步骤b中获得的沟槽内壁结构信息通过数据融合拼接,完成高深宽比曲面构件的全表面面形测量。
18.作为优选,所述步骤a中,激光干涉光针不对曲面构件上的沟槽内部结构进行扫描,仅获取曲面构件表面轮廓信息。
19.作为优选,所述步骤a包括以下子步骤:
20.a1.将待测曲面构件固定在构件夹具上;
21.a2.调整b轴运动台角度,使激光干涉光针测量方向正对曲面构件表面;
22.a3.通过z轴滑块与x轴滑块平动及b轴运动台回转进行三轴联动,使激光干涉光针探头跟踪曲面构件表面轮廓,且保证激光干涉光针探头始终指向曲面构件表面法向方向;在x轴滑块、z轴滑块、b轴运动台三轴联动驱动激光干涉光针运动的同时,通过c轴运动台驱动曲面构件回转运动,以在激光干涉光针跟随曲面构件表面运动的同时,曲面构件自身在回转运动,实现激光干涉光针对构件表面的随形扫描;
23.a4.激光干涉光针扫描完成后,在z轴滑块、x轴滑块及b轴运动台三轴联动下,激光干涉光针回位至测量起点。
24.作为优选,所述步骤b中,沟槽内壁结构信息由测量结果一与测量结构二通过数据拼接获得;扫描探针偏移曲面构件表面法向方向测得测量结果一和测量结构二,其中扫描探针测得测量结果一时,偏转角度记为测量角度一,扫描探针测得测量结果二时,偏转角度记为测量角度二;测量角度一与测量角度二的偏转方向相反。
25.作为优选,所述步骤b包括以下子步骤:
26.b1.激光干涉光针回位后,b轴运动台转动180度,调整扫描触针位置,使曲面构件表面在扫描触针的测量范围内,完成扫描探针与激光干涉光针换位;
27.b2.通过z轴滑块、x轴滑块、b轴运动台三轴联动,将扫描触针移动到沟槽结构附近,转动b轴运动台,使扫描触针偏移构件表面法向方向,偏移方向向右,偏转角度记为测量
角度一;在x轴、z轴、b轴三轴联动下,扫描触针沿着构件表面沟槽结构扫描,同时通过c轴运动台驱动构件回转运动,实现触针相对构件表面的随形扫描,扫描完成后,得到测量结果一,所述测量结果一为沟槽结构左半边侧面与底部形貌;在x轴、z轴、b轴三轴联动下,扫描触针回到初始位置;
28.b3.根据子步骤b2中的测量角度一,转动b轴运动台,使扫描触针反向偏转,即向左偏转,偏转角度记为测量角度二;在x轴、z轴、b轴三轴联动下,扫描触针沿着构件表面沟槽结构扫描,同时通过c轴运动台驱动构件回转运动,实现触针相对构件表面的随形扫描,扫描完成后,得到测量结果二,所述测量结果二为沟槽结构右半边侧面与底部形貌;
29.b4.将子步骤b2测得的测量结果一与子步骤b3测得的测量结果二进行数据拼接,得到沟槽结构完整形貌信息。
30.与现有技术相比,本发明具有以下有益效果:
31.(1)测量精度高,激光干涉光针与高长径比扫描触针组合的双探头测量系统可以实现高深宽比曲面构件面形的精确测量,解决了深沟槽底部和拐角微结构细节形貌的测量难题,无测量盲区;
32.(2)测量效率高,相比现有技术而言,在保证测量精度的同时,激光干涉光针与高长径比扫描触针组合的双探头测量效率高于仅通过触针测量,有效提高高深宽比曲面构件的测量效率;
33.(3)测量系统结构简单,测量过程除五轴运动台和双探头外,无需借助其他仪器,测量流程简易,操作难度低;
34.(4)数据处理简便,通过数据拼接实现曲面构件表面的面形测量,经过两次数据拼接即可完成数据处理过程,获得完整的高深宽比曲面构件面形。
附图说明
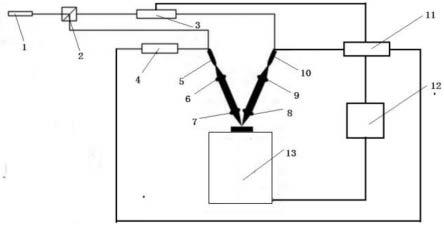
35.图1为本发明所述测量系统结构示意图;
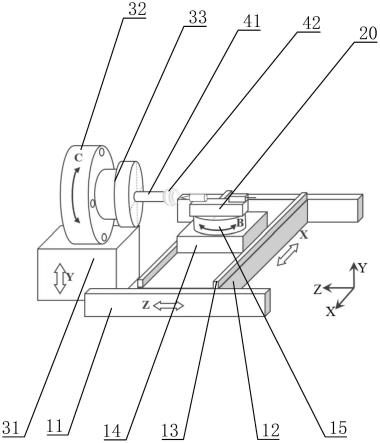
36.图2为本发明中双探头测量机构及待测曲面构件结构示意图;
37.图3为激光干涉光针随形扫描轮廓方法示意图;
38.图4为激光干涉光针随形扫描测量面形与实际面形偏差示意图;
39.图5为激光干涉光针与扫描探针切换方式示意图;
40.图6为扫描触针扫描高深宽沟槽结构方法示意图;
41.图7为激光干涉光针扫描数据与扫描触针扫描数据融合拼接示意图;
42.图中标记:z轴滑座11;z轴滑块12;x轴滑座13;x轴滑块14;b轴运动台15;双探头测量机构20;探头夹具21;激光干涉光针22;扫描触针23;y轴运动台31;c轴运动台32;c轴转接件33;构件夹具41;曲面构件42。
具体实施方式
43.下面结合附图所表示的实施例对本发明作进一步描述:
44.实施例1
45.如图1、图2所示,本实施例公开一种针对高深宽比曲面构件面形测量的测量系统,其用于实现复杂高深宽比曲面构件42跨尺度特征的全表面检测,该测量系统包括双探头测
量机构20、探头驱动机构及构件驱动机构。
46.双探头测量机构20,其包括光针及触针,该光针为激光干涉光针22,触针为高长径比扫描触针23,以方便其对高深宽比沟槽进行扫描探测;激光干涉光针22的探头与扫描触针23的探头间隔设置,并依次对曲面构件42进行扫描,其中激光干涉针用于对曲面构件42表面轮廓进行扫描,扫描触针23用于对曲面构件42上的沟槽结构进行扫描。
47.激光干涉光针22及扫描触针23均安装在探头夹具21上,激光干涉光针22及扫描触针23的探头背离设置,间隔180度,以方便激光干涉光针22及扫描触针23按序分别对曲面构件42进行单独扫描,避免单独扫描过程中,两者相互干扰。
48.探头驱动机构驱动双探头测量机构20对曲面构件42进行随形扫描,且探头驱动机构能够通过多轴联动使激光干涉光针22和扫描触针23的探头指向曲面构件42表面法相,并作相应角度的正向反向偏转。
49.探头驱动机构包括z轴滑座11及滑动设置在z轴滑座11上的z轴滑块12,该z轴滑块12能够在z轴滑座11上沿z轴方向往复滑动;z轴滑块12上固设有x轴滑座13,x轴滑座13上滑动设置有x轴滑块14,该x轴滑块14能够在x轴滑座13上沿x轴方向往复滑动;x轴滑块14上设有一b轴运动台15,该b轴运动台15能够绕b轴自转,且b轴平行于y轴。所述探头夹具21固设在b轴运动台15上,且激光干涉光针22与扫描触针23的探头均沿b轴运动台15的径向向外设置,激光干涉光针22与扫描触针23通过b轴运动台15转动实现换位。上述探头驱动机构通过z轴滑块12、x轴滑块14的平动以及b轴运动台15的转动,能够实现多轴联动,以将双探头测量机构20驱动至合适位置和合适角度,实现精准测量。
50.构件移动机构,其带动待测曲面构件42在双针测量机构的测量范围内作回转运动,所述构件移动机构包括y轴运动台31,y轴运动台31能够沿y轴方向往复移动,y轴运动台31上设c轴运动台32,该c轴运动台32能够绕c轴自转,且c轴平行于z轴;c轴运动台32的端面上设c轴转接件33,所述c轴转接件33与c轴运动台32同轴,c轴运用于固定曲面构件42的构件夹具41与c轴转接件33固接,本实施例中待测曲面构件42为具有高深宽比沟槽结构的球形构件,该曲面构件42的中心位于c轴延长线上,并跟随c轴运动台32沿y轴方向平动及沿c轴方向转动。
51.所述待测曲面构件42通过构件夹具41安装在c轴工作台上,随c轴工作台转动;探头夹具21位于b轴运动台15、z轴滑块12、x轴滑块14的叠加轴上,测量过程通过三轴联动,使激光干涉光针22和扫描触针23的探头能够指向曲面构件42表面法相,并作相应角度的正向反向偏转。本实施例所述双探头测量系统采用单点位移测量加多轴联动随形扫描的测量方法,来实现曲面构件42全表面的随形包络测量;为保证单个包络圆上的每个点都被测量到,构件需要在测量过程中旋转;为不断纵向扩展包络线,探头需要在测量过程中沿构件表面随形扫描,且测量方向一直以构件表面法向作为基准以保证测量精度。
52.上述面形测量系统综合激光干涉光针22在曲面轮廓、无损检测方面的优势以及高长径比扫描触针23对大曲率、小间隙结构的检测优势,开发了针对复杂微小构件的全表面检测系统,其集成了激光干涉光针22与扫描触针23,以激光干涉光针22检测曲面构件42表面结构形貌,以扫描触针23检测小空间大曲率沟槽结构,从而实现复杂高深宽比曲面构件42跨尺度特征的全表面检测。
53.实施例2
54.本实施例公开一种针对高深宽比曲面构件面形测量的测量方法,其采用上述测量系统进行测量。其测量步骤如下:
55.步骤a,利用激光干涉光针22对曲面构件42表面进行随形扫描,获取曲面构件42表面轮廓信息,该步骤中激光干涉光针22不对曲面构件42上的沟槽内部结构进行扫描,仅获取曲面构件42表面轮廓信息。具体步骤如下:
56.将待测曲面构件42固定在构件夹具41上,本实施例中待测曲面构件42为为具有高深宽比沟槽结构的球形构件,该曲面构件42的中心位于c轴延长线上。
57.如图3所示,调整b轴运动台15角度,使激光干涉光针22测量方向正对曲面构件42表面;通过z轴滑块12与x轴滑块14平动及b轴运动台15回转进行三轴联动,使激光干涉光针22探头跟踪曲面构件42表面轮廓,且保证激光干涉光针22探头始终指向曲面构件42表面法向方向;在x轴滑块14、z轴滑块12、b轴运动台15三轴联动驱动激光干涉光针22运动的同时,通过c轴运动台32驱动曲面构件42回转运动,以在激光干涉光针22跟随构件表面运动的同时,曲面构件42自身在回转运动,实现激光干涉光针22对曲面构件42表面的随形扫描。
58.激光干涉光针22扫描完成后,在z轴滑块12、x轴滑块14及b轴运动台15三轴联动下,激光干涉光针22回位至测量起点。扫描结果如图4所示,构件表面的高深宽比沟槽未扫描到,光针测量仅获取构件表面轮廓信息。
59.步骤b,利用扫描触针23对曲面构件42表面的沟槽结构进行扫描,获取沟槽内壁结构信息;本步骤中沟槽内壁结构信息由测量结果一与测量结构二通过数据拼接获得;扫描探针偏移曲面构件42表面法向方向测得测量结果一和测量结构二,其中扫描探针测得测量结果一时,偏转角度记为测量角度一,扫描探针测得测量结果二时,偏转角度记为测量角度二;测量角度一与测量角度二的偏转方向相反。具体步骤如下:
60.激光干涉光针22回位后,如图5所示,将b轴运动台15转动180度,调整扫描触针23位置,使曲面构件42表面在扫描触针23的测量范围内,完成扫描探针与激光干涉光针22换位。
61.通过z轴滑块12、x轴滑块14、b轴运动台15三轴联动,将扫描触针23移动到沟槽结构附近,转动b轴运动台15,使扫描触针23偏移构件表面法向方向,偏移方向向右,偏转角度记为测量角度一;在x轴、z轴、b轴三轴联动下,扫描触针23沿着构件表面沟槽结构扫描,同时通过c轴运动台32驱动构件回转运动,实现触针相对构件表面的随形扫描,扫描完成后,得到测量结果一,所述测量结果一为沟槽结构左半边侧面与底部形貌;在x轴、z轴、b轴三轴联动下,扫描触针23回到初始位置;根据测量角度一,转动b轴运动台15,使扫描触针23反向偏转,即向左偏转,偏转角度记为测量角度二;在x轴、z轴、b轴三轴联动下,扫描触针23沿着构件表面沟槽结构扫描,同时通过c轴运动台32驱动构件回转运动,实现触针相对构件表面的随形扫描,扫描完成后,得到测量结果二,所述测量结果二为沟槽结构右半边侧面与底部形貌。上述过程中测量角度一与测量角度二根据沟槽结构的深宽比进行确定,以保证扫描触针23能够探触扫描高深宽比沟槽的底部端角和侧面,通过左右偏转扫描分别获得沟槽结构右半边侧面与底部形貌以及沟槽结构左半边侧面与底部形貌,避免出现探测盲区,提高测量精度。
62.如图6所示,将测量结果一与测量结果二进行数据拼接,得到沟槽结构完整形貌信息。
63.步骤c,如图7所示,将激光干涉光针22扫描数据与扫描触针23扫描数据进行拼接,即将步骤a中获得的曲面构件42表面轮廓信息与步骤b中获得的沟槽完整形貌信息通过数据融合拼接,完成高深宽比曲面构件42的全表面面形测量。
64.本发明所述的用于高深宽比曲面构件42面形测量的测量系统与方法,通过激光干涉光针22扫描曲面整体轮廓,通过高长径比扫描触针23扫描高深宽比微结构,偏转扫描触针23正反向偏转扫描用于微结构底角与侧边扫描盲区的测量,结合点云配准算法将激光干涉光针22扫描数据与扫描触针23扫描数据拼接,实现高深宽比曲面构件42全表面轮廓的测量,提高测量精度与测量效率。
65.应该理解,在本发明的权利要求书、说明书中,所有“包括
……”
均应理解为开放式的含义,也就是其含义等同于“至少包含
……”
,而不应理解为封闭式的含义,即其含义不应该理解为“仅包含
……”
。以上所述,仅为本发明的具体实施方式,但本发明的保护范围并不局限于此,本技术领域的技术人员在本发明的实质范围内所做出的变化、改型、添加或替换,都应涵盖在发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。