1.本发明涉及光学三维检测技术领域,具体为一种高精度式激光投影视觉三维测量系统。
背景技术:
2.在工业生产过程中,物体的表面质量的情况会影响正常的工业生产。随着科技的飞速发展,现代工业自动化对工件几何尺寸的测量技术提出越来越高的要求。尤其是对于高精度的设备,对于工件的尺寸等表面信息的检测是必不可少的,传统的二维相机尺寸测量系统利用工业相机拍摄平面图像,通过分析灰度图像或彩色图像来计算被测对象上被测量目标的尺寸,此类系统采集的图像精度较差,噪声较大,影响后续测量精度,无法满足实际需要。
技术实现要素:
3.本发明的目的在于提供一种高精度式激光投影视觉三维测量系统,具备了通过采用三维测量系统,并配合图像处理单元,对相机采集图像进行数据平滑、去除噪声,来降低误差,提高图像精度的效果,解决了上述背景技术中所提到的问题。
4.为实现上述目的,本发明提供如下技术方案:一种高精度式激光投影视觉三维测量系统,包括计算机、时序同步装置、激光投影模块和图像采集模块,还包括工作台,所述激光投影模块和所述图像采集模块均与所述计算机连接,所述工作台上设置有支架,所述激光投影模块和所述图像采集模块均安装在所述支架表面,所述激光投影模块包括角度调节单元、激光投影装置、动态聚焦单元和投射单元,所述图像采集模块包括图像采集装置、图像处理单元和计算单元,所述工作台上放置有工件,所述工作台上设置有测量区域,所述工件位于测量区域的中心位置,所述图像处理单元包括高频图像采集单元、加权平均单元和转换单元,所述支架上设置有反馈控制器,所述反馈控制器与所述计算机信号连接。
5.可选的,所述反馈控制器包括多色led灯,不同颜色灯代表不同的工作距离,通过所述计算机向所述反馈控制器发送三维扫描距离信息,使得所述反馈控制器根据距离信息发出对应指示灯光,从而帮助人工操作时实时调整工作距离。
6.可选的,所述角度调节单元可以调节激光投影装置的光源发射角度,方便投射到适合的工件位置,进而提高工件相关尺寸的测量精度。
7.可选的,所述激光投影模块包括激光投影仪,所述激光投影仪竖直安装在所述支架上,所述图像采集装置包括cmos相机一和cmos相机二。
8.可选的,所述动态聚焦单元包括准直镜、调焦镜和调焦控制器,所述调焦控制器与所述计算机信号连接,所述投射单元为两个一维振镜组合而成。
9.可选的,所述激光投影仪为高亮度短焦激光投影仪,亮度3000lm,投影比小于1。
10.可选的,所述工业相机一和所述工业相机二均倾斜设置在所述支架表面,所述激光投影仪投射的光源构成的光源面与所述工业相机一和所述工业相机二的光轴之间形成
预设角度,避免出现所述激光投影仪的光源面与相机光轴平行或共面的情况。
11.可选的,所述cmos相机一和所述cmos相机二的表面呈环形阵列设置有若干光源,所述光源为发光二极管,用于增加相机采集到的所述工件表面的反射光强度。
12.与现有技术相比,本发明的有益效果如下:
13.一、本发明通过设置高频图像采集单元对图像采集装置拍摄的原始图像进行下层网络训练,获取工件图像的高频信息,再通过加权平均模块对原始信息和高频信息进行加权,获取到比原始图像精度更高的超分辨率重建图像一,最后再通过转换模块,利用亚像素卷积层将超分辨率重建图像一转换为超分辨率重建图像二,从而有效的提高图像的精度。
14.二、本发明通过在cmos相机一和cmos相机二的表面呈环形阵列设置若干光源,在使用时启动光源,从而增加相机采集到的工件表面的反射光强度,保证相机能够采集到清晰的图像,提高测量精度。
15.三、本发明通过时序同步装置同时启动cmos相机一和cmos相机二,保证图像的同步采集,降低误差。
附图说明
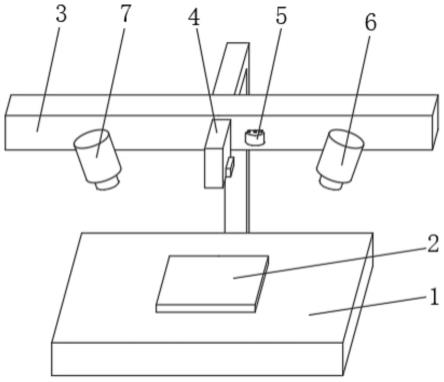
16.图1为本发明系统结构的示意图;
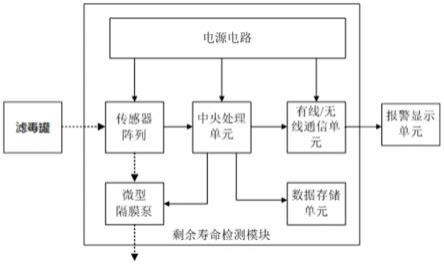
17.图2为本发明系统结构框图;
18.图3为本发明图像处理单元结构的框图;
19.图4为本发明cmos相机结构示意图。
20.图中:1、工作台;2、工件;3、支架;4、激光投影仪;5、反馈控制器;6、cmos相机一;61、光源;7、cmos相机二。
具体实施方式
21.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
22.请参阅图1至图4,本实施例中提供一种高精度式激光投影视觉三维测量系统,包括计算机、时序同步装置、激光投影模块和图像采集模块,其特征在于:还包括工作台1,激光投影模块和图像采集模块均与计算机连接,工作台1上设置有支架3,激光投影模块和图像采集模块均安装在支架3表面,激光投影模块包括角度调节单元、激光投影装置、动态聚焦单元和投射单元,图像采集模块包括图像采集装置、图像处理单元和计算单元,工作台1上放置有工件2,工作台1上设置有测量区域,工件2位于测量区域的中心位置,图像处理单元包括高频图像采集单元、加权平均单元和转换单元,支架3上设置有反馈控制器5,反馈控制器5与计算机信号连接。
23.更为具体的来说,在本实施例中,通过激光投影装置向工件2表面进行投影,在工件2表面形成激光光条,再通过时序同步装置图像采集装置,扫描工件2和周围环境并且拍摄其图像,然后图像经过图像处理单元进行处理,提高精度,再通过计算单元提取拍摄的工件2图像中激光光条的中心线,将中心线上的每一个点与相机坐标连成直线,然后求取直线
与对应光平面的交点,即可得到工件2表面的中心线在相机坐标系下的三维坐标,根据激光中心线的坐标信息来计算出三维空间中工件2表面的点云数据,将工件2表面所有点数据进行拟合,从而获得工件2所有点的三维坐标,并经过空间识别算法对三维测量数据进行修正,提高三维测量精度;
24.在图像处理单元中,通过均值滤波单元对图像进行数据平滑、去除噪声,来降低误差提高精度,均值滤波器的系统函数如下所示:
25.hm(i,j|m,n)=mn/1
26.其中m与n分别表示滤波器列与行方向的大小,i与j分别表示滤波器列与行方向的索引;
27.通过设置高频图像采集单元对图像采集装置拍摄的原始图像进行下层网络训练,获取工件2图像的高频信息,再通过加权平均模块对原始信息和高频信息进行加权,将高频信息添加至原始信息中,从而获取到比原始图像精度更高的超分辨率重建图像一,最后再通过转换模块,利用亚像素卷积层将超分辨率重建图像一转换为超分辨率重建图像二,从而有效的提高图像的精度。
28.进一步的,在本实施例中:反馈控制器5包括多色led灯,不同颜色灯代表不同的工作距离,通过计算机向反馈控制器5发送三维扫描距离信息,使得反馈控制器5根据距离信息发出对应指示灯光,从而帮助人工操作时实时调整工作距离。
29.更为具体的来说,在本实施例中。
30.进一步的,在本实施例中:角度调节单元可以调节激光投影装置的光源发射角度,方便投射到适合的工件位置,进而提高工件相关尺寸的测量精度。
31.进一步的,在本实施例中:激光投影模块包括激光投影仪4,图像采集装置包括cmos相机一6和cmos相机二7,通过采用cmos相机与一般ccd相机相比价格较低,功耗低,能够降低成本,成像速度快,分别率高,具有良好的动态性能,并配合使用低畸变大视场镜头,相机工作范围能够覆盖工件2全部,在使用时通过时序同步装置同时启动cmos相机一6和cmos相机二7,保证图像的同步采集,降低误差。
32.进一步的,在本实施例中:动态聚焦单元包括准直镜、调焦镜和调焦控制器,调焦控制器与计算机信号连接,投射单元为两个一维振镜组合而成,在使用时,动态聚焦单元用于优化激光投影仪4的投影激光,降低光束发散角,实现基于距离的动态聚焦,通过聚焦投射确保照射在工件2上的激光线条最窄,进而保证定位精度,通过设置投射单元为两个一维振镜组合而成,振镜扫描精度高、速度快和扫描范围大,振镜在工件2上形成预设的稳定激光图样,通过对振镜快速准确控制,能够实现高质量激光图样。
33.进一步的,在本实施例中:激光投影仪4为高亮度短焦激光投影仪,亮度大于3000lm,投影比小于1,在使用时可投射大视场高亮度条纹,覆盖所有相机有效测量范围。
34.进一步的,在本实施例中:工业相机一6和工业相机二7均倾斜设置在支架3表面,激光投影仪4投射的光源构成的光源面与工业相机一6和工业相机二7的光轴之间形成预设角度,避免出现激光投影仪4的光源面与相机光轴平行或共面的情况。
35.进一步的,在本实施例中:cmos相机一6和cmos相机二7的表面呈环形阵列设置有若干光源61,光源61为发光二极管,在使用时启动光源61,从而增加相机采集到的工件2表面的反射光强度,保证相机能够采集到清晰的图像。
36.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。