1.本公开涉及一种安装在包裹递送车辆中的系统,所述系统使得包裹能够被自动转移到路边接收器。
背景技术:
2.电子商务在全球范围内持续增长,其中最后一英里递送占运输费用的比例不断增加。不幸的是,包裹经常被盗,其中包裹盗窃在城市地区尤其高。关于这些和其他考虑,提出了本文的公开内容。
技术实现要素:
3.公开了一种安装在包裹递送车辆中的系统,所述系统使得包裹能够被自动转移到路边接收器,例如储物柜。首先,将包裹储存于在车辆内部的圆盘传送带上循环的隔间柜中。当车辆接近其目的地时,圆盘传送带使柜循环以将包裹带到其相应的门后面的位置。当车辆接近储物柜时,其使用车载传感器和处理器来迭代地标识储物柜,估计储物柜的相对姿势,规划将车辆带到期望的相对姿势的轨迹,并且执行所规划的轨迹。然后,车辆可与储物柜通信,提供访问代码,并且请求储物柜打开其门。如果门没有打开,则过程可终止并且车辆可继续进行下一次递送。如果门打开,则车载传感器和处理器可标识储物柜中用于包裹的合适位置。如果不存在合适的位置,则过程可终止并且车辆可继续进行下一次递送。
4.然后,传送机可枢转并移动到包裹门。然后可打开包裹门。可使用推动柱塞和从传送机拉出将包裹从柜中弹出。一旦车载传感器和处理器确定包裹已经完全离开车辆,则可停止传送机并且可关闭包裹门。车载传感器和处理器然后可规划将包裹从其当前位置移动到储物柜中的期望目的地的轨迹。然后,可移动传送臂以到达储物柜。最后,传送机可将包裹转移到储物柜中。
附图说明
5.参考附图阐述具体实施方式。使用相同的附图标记可指示类似或相同的项。各种实施例可利用除了附图中示出的元件和/或部件之外的元件和/或部件,并且一些元件和/或部件可能不存在于各种实施例中。附图中的元件和/或部件不一定按比例绘制。在整个本公开中,根据上下文,单数和复数术语能够可互换地使用。
6.图1示出了根据本公开的原理的用于将包裹递送到路边接收器的系统。
7.图2a至图2c示出了根据本公开的原理构造的递送车辆。
8.图3是示出了根据本公开的原理的用于将包裹递送到路边接收器的示例性步骤的流程图。
9.图4a至图4i示出了根据本公开的原理的用于将包裹递送到路边接收器的示例性步骤。
10.图5a和图5b示出了根据本公开的原理的用于将包裹递送到路边接收器的可替代
示例性步骤。
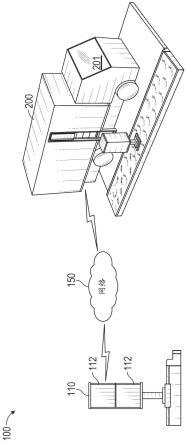
11.图6a和图6b示出了根据本公开的原理的车辆的替代示例性隔室。
具体实施方式
12.下文将参考附图更全面地描述本公开,其中示出了本公开的示例性实施例。然而,本公开可以许多不同形式来体现,并且不应被解释为受限于本文阐述的示例性实施例。相关领域技术人员将理解,在不脱离本公开的精神和范围的情况下可对各种实施例作出形式和细节上的各种改变。因此,本公开的广度和范围不应受到上述示例性实施例中的任何一个限制,而是应仅根据以下权利要求和其等效物限定。以下描述是为了说明目的而呈现,并且不意图是详尽性的或受限于所公开的精确形式。应当理解,替代实现方式可以任何组合来使用,以形成本公开的另外的混合实现方式。例如,关于特定装置/部件描述的任何功能性可通过另一个装置/部件来执行。另外,尽管已经描述了具体装置特性,但本公开的实施例可能涉及许多其他装置特性。另外,尽管已用特定于结构特征和/或方法动作的语言描述了实施例,但是应当理解,本公开不一定受限于所描述的特定特征或动作。相反,将具体特征和动作公开为实现实施例的说明性形式。
13.本文中使用的某些词语和短语仅是为了方便,并且此类词语和术语应被解释为指代本领域的普通技术人员通常以各种形式和等效形式所理解的各种对象和动作。
14.现在参考图1,提供了用于将一个或多个包裹递送到指定接收器的系统100。系统100可包括车辆200,其可经由网络150与接收器110(例如,路边锁箱)通信。网络150可包括各网络诸如局域网(lan)、广域网(wan)、电话网络、蜂窝网络、无线网络和/或专用/公共网络(诸如互联网)中的任一者或组合。例如,网络150可支持诸如tcp/ip、蓝牙、蜂窝、近场通信(nfc)、wi-fi、wi-fi直连、机器对机器通信、人对机器通信和/或可见光通信的通信技术。
15.支持车辆200与可包括在网络150中的通信装置(诸如路由器)之间的通信的无线通信链路的一些部分或所有部分可使用诸如或近场通信(nfc)、蜂窝、wi-fi、wi-fi直连、机器对机器通信、人对机器通信和/或车辆对外界(v2x)通信的各种类型的无线技术来实现。
16.接收器110可以是设置在车辆200可触及的区域中的路边储物柜,如下面进一步详细描述的。接收器110可包括一个或多个隔室,所述一个或多个隔室的尺寸和形状被设计成用于接收一个或多个包裹,每个隔室具有门,例如如图1所示的门112。接收器110可包括用于与车辆200通信的收发器和用于处理从车辆200接收的数据的处理器。例如,收发器可从车辆200接收访问代码,并且处理器可确定是否可接受访问代码。如果接受访问代码,则处理器将使对应的接收器门打开以接收包裹。如果拒绝访问代码,则处理器可向车辆200传输通知。替代地,如果拒绝访问代码,则处理器可不执行任何操作,并且接收器门将保持关闭。
17.车辆200可以是手动驾驶的车辆(例如,无自主),和/或被配置和/或编程为在完全自主(例如,无人驾驶)模式(例如,5级自主)下或在一种或多种部分自主模式(其可包括驾驶员辅助技术)下操作。部分自主(或驾驶员辅助)模式的示例在本领域中被广泛地理解为1级至4级自主。具有0级自主自动化的车辆可不包括自主驾驶特征。具有1级自主的自主车辆(av)可包括单个自动化驾驶员辅助特征,诸如转向或加速辅助。自适应巡航控制是1级自主系统的一个此类示例,其包括加速和转向两个方面。车辆中的2级自主可提供转向和加速功
能的部分自动化,其中自动化系统由执行非自动化操作诸如制动和其他控制的人类驾驶员监督。在一些方面,在2级和更高级别的自主特征情况下,主用户可在用户在车辆内部时控制车辆,或者在一些示例性实施例中,在车辆处于远程操作时,从远离车辆但在从车辆延伸长达几米的控制区内的位置控制车辆。车辆中的3级自主可提供对驾驶特征的条件自动化和控制。例如,3级车辆自主典型地包括“环境检测”能力,其中车辆可独立于当前的驾驶员而做出明智的决策,诸如加速驶过缓慢移动的车辆,而如果系统无法执行任务,则当前的驾驶员仍准备好重新取得对车辆的控制。4级自主车辆可独立于人类驾驶员操作,但仍可包括用于超驰操作的人类控制。4级自动化还可使自驾驶模式能够响应于预定义的条件触发(诸如道路危险或系统故障)进行干预。5级自主与无需人类输入以进行操作并且通常不包括人类操作的驾驶控制的自主车辆系统相关联。
18.车辆200可具有操作性地联接到收发器以与接收器110通信的控制模块201。此外,控制模块201可接收指示目标接收器的身份和位置的数据,并且规划到目标接收器的导航路线。当车辆200接近目标接收器(例如接收器110)时,其可使用车载传感器和处理器迭代地标识目标接收器、估计目标接收器的相对姿势、规划将车辆200带到期望的相对姿势的轨迹,并且执行所规划的轨迹。车辆200然后可与目标接收器通信,提供访问代码,并且请求目标接收器打开其门,例如门112。如果接收器门没有打开,则过程可终止并且车辆200可继续进行下一次递送。如果接收器门打开,车载传感器和处理器可标识目标接收器中的合适位置以递送包裹。如果不存在或找不到合适的位置,则过程可终止并且车辆200可继续进行下一次递送。除此之外,控制模块201可通信地耦合到本文描述的车辆200的部件,例如,圆盘传送带202、传送臂204、门212、可伸缩臂210、柱塞216等以指示部件执行赋予它们的功能。
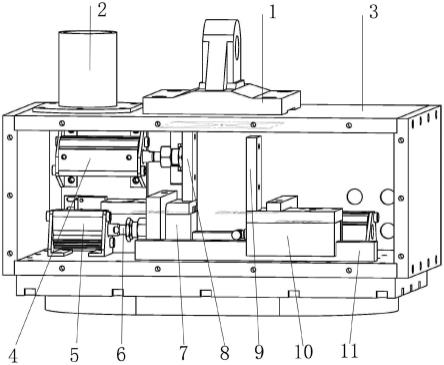
19.现在参考图2a至图2c,进一步详细描述了车辆200。车辆200可包括例如设置在车辆200的货物箱内的圆盘传送带202。圆盘传送带202可包括竖直堆叠的隔室的阵列(例如,柜),每个隔室的尺寸和形状被设计成在其中存储一个或多个包裹。给定隔室的包裹可与目标接收器相关联以递送到其中。每个隔室可包括其自己的门,例如,隔室门214。在一个实施例中,柜的每个隔室的尺寸可以是一致的。
20.替代地,如图6a和图6b所示,柜的隔室的尺寸可变化。例如,柜224的每个隔室的不同尺寸可以是固定的,如图6a所示,使得隔室的尺寸在朝向地面的方向上增大。因此,尺寸和形状被设计成接收包裹p1的尺寸的包裹的隔室c1可小于尺寸和形状被设计成接收包裹p2的尺寸的包裹的隔室c2。如本领域普通技术人员将理解的,变化的固定隔室尺寸可以其他模式(例如,尺寸在朝向地面的方向上减小)或者另一种随机分布进行分布。
21.替代地,柜(例如,柜226)的隔室可由等距间隔开的可移除搁架228形成,如图6b所示。因此,搁架228可移除以形成较大的隔室或添加以形成较小的隔室。因此,尺寸和形状被设计成接收包裹p3的尺寸的包裹的隔室c3可小于尺寸和形状被设计成接收包裹p4的尺寸的包裹的隔室c4。
22.再次参考图2a至图2c,圆盘传送带202可具有圆形例如椭圆形形状,使得圆盘传送带202可在货物箱车辆200内例如沿着集成在车辆200内的轨道旋转。此外,车辆200可包括递送窗口208,所述递送窗口208可沿着车辆200的侧面竖直延伸。递送窗口208可具有与圆盘传送带202的柜的尺寸相对应的尺寸,使得圆盘传送带202可旋转,使得柜可例如经由对准传感器与递送窗口208对准。如以上所描述的,圆盘传送带202的柜的每个隔室可具有其
自己的门。除此之外或替代地,递送窗口208可具有与圆盘传送带202的柜的每个隔室相对应的门。在一个实施例中,递送窗口208可相对于车辆200的货物箱固定。
23.在一些实施例中,车辆200不需要包括货物箱,使得圆盘传送带200是暴露的,并且因此是防风雨的。在这种实施例中,递送窗口208可沿着车辆200的侧面例如在联接到车辆200的轨道上水平滑动。例如,在车辆200接近接收器110并停止之后,递送窗口208可能不与接收器110完美对准。因此,递送窗口208可沿着轨道滑动,直到它例如经由对准传感器与接收器110对准。然后,圆盘传送带200可旋转直到具有目标隔室的目标柜与递送窗口208对准。
24.车辆200还可包括传送臂204,所述传送臂204可包括用于在其上移动包裹的传送带。传送臂204能够可滑动地联接到递送窗口208,使得传送臂204可沿着递送窗口208竖直地移动以与圆盘传送带202的柜的隔室竖直地对准。此外,传送臂204可经由可伸缩臂210可滑动地联接到递送窗口208。例如,可伸缩臂210的近端可在连接件212处枢转地且可滑动地联接到递送窗口208,并且可伸缩臂210的远端可在连接件206处枢转地联接到传送臂204。因此,传送臂204可经由连接件206在缩回位置(例如,收起位置)与伸出位置(例如,递送位置)之间转换,并且传送臂204可经由可伸缩臂210和连接件212沿着递送窗口208竖直地移动。此外,可伸缩臂210可围绕连接件212枢转以使传送臂204远离车辆200并且更靠近接收器110延伸,如图2a所示。
25.车辆200还可包括用于将目标隔室内的包裹弹出到传送臂204上的柱塞机构。例如,如图2c所示,车辆200可包括多个竖直堆叠的柱塞216,每个柱塞与圆盘传送带202的柜的隔室的后部对准。柱塞216可包括与隔室门平行延伸的扁平主体,并且尺寸被设计成配合在隔室内,使得当柱塞朝向隔室门移动时,柱塞将隔室中的包裹推出隔室并且推出到传送臂204上。替代地,柱塞机构可包括单个柱塞216,所述单个柱塞216可在车辆200内竖直平移以与目标隔室对准,使得仅需要一个柱塞来将包裹从对应的隔室弹出。
26.现在参考图3,提供了用于将一个或多个包裹递送到接收器110的示例性方法300。方法300的步骤中的一些可通过参考图4a至图4i进一步详细描述。当车辆200接近接收器110(例如,路边锁箱)时,在步骤302处,车辆200上的传感器可定位接收器110,使得车辆200可移动以将递送窗口208与接收器110对准,如图4a所示。例如,车载传感器和处理器可迭代地标识接收器110、估计接收器110的相对姿势、规划将车辆200带到期望的相对姿势的轨迹,并且执行所规划的轨迹以使递送窗口208与接收器110对准。车辆200上的对准传感器可用于促进与接收器110的对准。
27.在步骤304处,圆盘传送带202可在车辆200内旋转直到目标隔室与递送窗口208对准。车辆200然后可将访问代码(例如使接收器110打开门112的请求)传输到接收器110。如果访问代码被接受,则在步骤306处,接收器110的门112可打开,如图4b所示。在步骤308处,传送臂204可例如围绕连接件206枢转从缩回收起位置转换到伸出递送位置,如图4c所示,并且沿着递送窗口208滑动直到传送臂204与目标隔室对准,如图4d所示。在步骤310处,目标隔室的门214可打开,如图4e所示。
28.在步骤312处,柱塞机构216可用于将包裹p从目标隔室转移到传送臂204上,如图4f所示。除此之外,传送臂204的传送带可被致动以促进将包裹p转移到传送臂204上。在步骤314处,传送臂204可沿着递送窗口208滑动以将传送臂204与接收器110的开口对准,如图
4g所示。在步骤316处,传送臂204可定位在接收器110的开口附近。例如,可伸缩臂210的近端可围绕连接件212枢转,而传送臂204围绕连接件206枢转以维持传送机204的平坦表面以将包裹p维持在其上,从而使传送臂204朝向接收器110延伸,如图4h所示。在步骤318处,传送机204的传送带可被致动以将包裹p转移到接收器110中,如图4i所示。接收器110的门112然后可关闭以将包裹p固定在其中,并且传送臂204可返回到其缩回位置,并且门212可关闭以完成递送过程。如果需要将来自附加隔室的附加包裹递送到同一接收器,则可重复本文描述的步骤。
29.现在参考图5a和图5b,描述了用于在方法300的步骤316处将传送臂204定位在接收器110的开口附近的替代方法。这里,代替可伸缩臂210,车辆200可包括可伸缩臂220。可伸缩臂220的近端可在连接件222处枢转地联接到递送窗口208,如图5a所示。除此之外,传送臂204能够可滑动地且枢转地联接到可伸缩臂220,使得传送臂204可沿着可伸缩臂220竖直滑动。因此,在步骤316处,可伸缩臂220可围绕连接件222枢转以将传送臂204定位在接收器110的开口附近,如图5a所示,并且在步骤318处,可致动传送机204的传送带以将包裹p转移到接收器110中,如图5b所示。
30.在以上公开中,已经参考了形成以上公开的一部分的附图,附图示出了可实践本公开的具体实现方式。应当理解,在不脱离本公开的范围的情况下,可利用其他实现方式,并且可进行结构改变。说明书中对“一个实施例”、“实施例”、“示例实施例”、“示例实施例”等的引用指示所描述的实施例可包括特定特征、结构或特性,但是每一个实施例可不必包括所述特定特征、结构或特性。此外,此类短语不一定指相同的实施例。另外,当结合实施例描述特定特征、结构或特性时,无论是否明确描述,本领域的技术人员都将认识到结合其他实施例的此类特征、结构或特性。
31.本文所公开的系统、设备、装置和方法的实现方式可包括或利用包括硬件(诸如,例如本文所讨论的一个或多个处理器和系统存储器)的一个或多个装置。本文所公开的装置、系统和方法的实现方式可通过计算机网络进行通信。“网络”被定义为使得能够在计算机系统和/或模块和/或其他电子装置之间传输电子数据的一个或多个数据链路。当通过网络或另一通信连接(硬连线、无线或者硬连线或无线的任何组合)向计算机传递或提供信息时,所述计算机适当地将连接视为传输介质。传输介质可包括网络和/或数据链路,所述网络和/或数据链路可用于携载呈计算机可执行指令或数据结构的形式的期望的程序代码装置,并且可由通用或专用计算机访问。以上项的组合也应包括在非暂时性计算机可读介质的范围内。
32.计算机可执行指令包括例如当在处理器处执行时致使处理器执行特定功能或功能组的指令和数据。计算机可执行指令可能是例如二进制代码、中间格式指令(诸如汇编语言)或者甚至源代码。虽然已经用特定于结构特征和/或方法动作的语言描述了本主题,但是应当理解,在所附权利要求中限定的主题不一定限于以上描述的所述特征或动作。而是,所描述的特征和动作被公开作为实现权利要求的示例性形式。
33.本领域技术人员将了解,本公开可在具有许多类型的计算机系统配置的网络计算环境中实践,所述计算机系统配置包括内置式车辆计算机、个人计算机、台式计算机、膝上型计算机、消息处理器、手持式装置、多处理器系统、基于微处理器的或可编程的消费电子产品、网络pc、小型计算机、大型计算机、移动电话、pda、平板电脑、寻呼机、路由器、交换机、
各种存储装置等。本公开也可在分布式系统环境中实践,其中通过网络(通过硬连线数据链路,和/或无线数据链路)链接的本地和远程计算机系统都执行任务。在分布式系统环境中,程序模块可位于本地和远程存储器存储装置两者中。
34.另外,在适当的情况下,本文描述的功能可在硬件、软件、固件、数字部件或模拟部件中的一者或多者中执行。例如,一个或多个专用集成电路(asic)可被编程为执行本文所描述的系统和程序中的一者或多者。贯穿说明书以及权利要求使用某些术语指代特定系统部件。如本领域技术人员将理解,部件可通过不同的名称来指代。本文件不意图区分名称不同但功能相同的部件。
35.本公开的至少一些实施例已经涉及计算机程序产品,所述计算机程序产品包括存储在任何计算机可用介质上的这种逻辑(例如,以软件的形式)。这种软件当在一个或多个数据处理装置中被执行时致使装置如本文所描述那样进行操作。
36.尽管上文已描述了本公开的各种实施例,但是应当理解,仅通过示例而非限制的方式呈现本公开的各种实施例。相关领域技术人员将明白,在不脱离本公开的精神和范围的情况下可作出形式和细节上的各种改变。因此,本公开的广度和范围不应受到上述示例性实施例中的任何一个限制,而是应仅根据以下权利要求和其等效物限定。已经出于说明和描述的目的而呈现了前述描述。前述描述并不意图是详尽的或将本公开限制于所公开的精确形式。鉴于以上教导,许多修改和变化是可能的。另外,应当注意,前述替代实现方式中的任一者或全部可按任何所期望的组合使用,以形成本公开的附加混合实现方式。例如,相对于特定装置或部件描述的功能中的任一者可由另一个装置或部件执行。另外,尽管已经描述了具体装置特性,但本公开的实施例可能涉及许多其他装置特性。另外,尽管已用特定于结构特征和/或方法动作的语言描述了实施例,但是应当理解,本公开不一定受限于所描述的特定特征或动作。相反,将具体特征和动作公开为实现实施例的说明性形式。除非另有特别说明或在使用时在上下文内以其他方式理解,否则诸如尤其是“能够”、“可能”、“可以”或“可”的条件语言通常意图表达某些实施例可能包括某些特征、元件和/或步骤,而其他实施例可不包括某些特征、元件和/或步骤。因此,此类条件语言通常并不意图暗示一个或多个实施例无论如何都需要各特征、元件和/或步骤。
37.在本发明的一个方面,在所述车辆内移动所述圆盘传送带包括:在所述车辆内旋转所述圆盘传送带以将所述目标隔室与所述递送窗口对准。
38.在本发明的一个方面,将所述目标包裹从所述传送臂转移到所述路边接收器包括:经由联接到所述传送臂和所述递送窗口的可伸缩臂使所述传送臂朝向所述路边接收器延伸。
39.在本发明的一个方面,所述方法包括:在将所述目标隔室内的所述目标包裹通过所述递送窗口转移到所述传送臂上之前打开所述目标隔室的门。
40.在本发明的一个方面,所述方法包括:向所述路边接收器传输访问代码,所述访问代码包括使所述路边接收器的门打开的请求。
41.在本发明的一个方面,所述方法包括:接收路边接收器位置数据;以及规划将所述车辆的所述递送窗口与所述路边接收器对准的导航路线。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。