1.本实用新型涉及自动化拆袋设备技术领域,尤其涉及一种自动实现包装袋与物料分离的机械手。
背景技术:
2.轮胎、橡胶、食品、医药、精细化工等行业经常需要用到一种外包装是编织袋,内包装是塑料袋的物料。生产中,这类外包装进行拆袋的工艺,通常都是通过人工拆除编织袋上的缝合线,来拆开编织袋。这种方法比较原始,浪费时间和人力,效率低,而且容易人工用力不均匀破坏内包装塑料袋,因此亟需一种自动化的设备能够将编织袋的外袋开封,并保证拆袋过程中不伤及内袋,以提高拆袋的工作效率,节省人力资本,确保内部包装的完整性。
技术实现要素:
3.本实用新型为解决上述问题,提供一种自动实现包装袋与物料分离的机械手。
4.为解决上述技术问题,本实用新型的技术方案是:一种自动实现包装袋与物料分离的机械手,包括机械手箱体,机械手箱体的顶部安装有真空气管接头;机械手箱体的内底面上安装有两根平行的导轨,两根导轨上分别滑动连接有左滑块、右滑块,两块短行程气缸推动板分别与左滑块、右滑块固定连接,每块短行程气缸推动板均通过短行程气缸推动头与短行程气缸连接;两个长行程气缸通过长行程气缸浮动连接头分别与左侧插针连接板、右侧插针连接板连接,机械手箱体的内侧壁上安装有接近开关、接近检测块,接近开关、接近检测块位于长行程气缸和长行程气缸浮动连接头的下方;机械手箱体的侧壁开设有气缸气管连接孔,机械手箱体的底部中心开设有真空抽气孔,位于真空抽气孔两侧的机械手箱体的底部安装有插针固定板,插针固定板内过盈配合安装有插针,插针的内侧端设有插针挡板,插针挡板固定在机械手箱体的底部,两个插针固定板外环绕有真空海绵吸盘,真空海绵吸盘粘接在机械手箱体的底部。
5.进一步的,机械手箱体的顶部通过活动接头连接在机械臂上。
6.进一步的,短行程气缸通过短行程气缸固定架固定在机械手箱体的内底面上。
7.进一步的,长行程气缸通过长行程气缸固定架固定在机械手箱体的内侧壁上。
8.本实用新型取代原始人工作业过程,自动精准、高效实现外包装袋与被包装物料分离,节省了人力投入成本,并保证拆分过程中不会伤及内袋,安全可靠。
附图说明
9.图1是本实用新型结构示意图一;
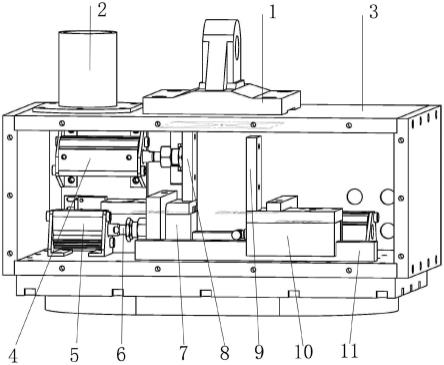
10.图2是本实用新型结构示意图二;
11.图3是本实用新型底部结构示意图;
12.图4是本实用新型外部结构示意图。
13.其中:1、活动接头;2、真空气管接头;3、机械手箱体;4、长行程气缸;5、短行程气
缸;6、短行程气缸推动头;7、左滑块;8、左侧插针连接板;9、右侧插针连接板;10、右滑块;11、导轨;12、插针挡板;13、真空抽气孔;14、插针;15、真空海绵吸盘;16、气缸气管连接孔;17、长行程气缸浮动连接头;18、长行程气缸固定架;19、接近开关;20、接近检测块;21、短行程气缸固定架;22、短行程气缸推动板。
具体实施方式
14.下面结合附图1-4对本实用新型的具体实施方式作进一步说明。
15.一种自动实现包装袋与物料分离的机械手,包括机械手箱体3,机械手箱体3由六块按规定尺寸加工好的厚钢板通过螺栓连接组成,机械手箱体3的顶部安装有真空气管接头2,机械手箱体3的顶部通过活动接头1连接在机械臂上;机械手箱体3的内底面上安装有两根平行的导轨11,两根导轨11上分别滑动连接有左滑块7、右滑块10,两块短行程气缸推动板22分别与左滑块7、右滑块10固定连接,每块短行程气缸推动板22均通过短行程气缸推动头6与短行程气缸5连接,短行程气缸5通过短行程气缸固定架21固定在机械手箱体3的内底面上;两个长行程气缸4通过长行程气缸浮动连接头17分别与左侧插针连接板8、右侧插针连接板9连接,长行程气缸4通过长行程气缸固定架18固定在机械手箱体3的内侧壁上,机械手箱体3的内侧壁上安装有接近开关19、接近检测块20,接近开关19、接近检测块20位于长行程气缸4和长行程气缸浮动连接头17的下方;机械手箱体3的侧壁开设有气缸气管连接孔16,机械手箱体3的底部中心开设有真空抽气孔13,位于真空抽气孔13两侧的机械手箱体3的底部安装有插针固定板,插针固定板内过盈配合安装有插针14,插针14的内侧端设有插针挡板12,插针挡板12固定在机械手箱体3的底部,两个插针固定板外环绕有真空海绵吸盘15,真空海绵吸盘15粘接在机械手箱体3的底部。
16.动作原理:机械手箱体3通过活动接头1连接在机械臂上,工作时智能识别定位,整体降落压在被分离包装袋上,通过真空气管接头2进行抽气至机械手箱体3内真空,真空海绵吸盘15吸住外包装袋,短行程气缸5、短行程气缸推动头6、短行程气缸推动板22开始作业,在密闭空间短行程推动左滑块7、右滑块10,真空抽气孔13处压力增强通过吸力将包装袋整体抬升20mm,气缸气管连接孔16注入气体,长行程气缸4和长行程气缸浮动连接头17共进运动,通过接近开关19、接近检测块20检测气缸运动是否到位,带动左侧插针连接板8、右侧插针连接板9,进而推动插针14落下,插入袋子,将外包装袋整体抬起与内部物料分离,机械手上升至安全位置并移动至废弃包装袋区,气缸气管连接孔16停止供气,长行程气缸浮动连接头17退回运动,通过接近开关19、接近检测块20检测气缸运动是否到位,插针14缩回复位,插针挡板12挡住包装袋,插针14与包装袋分离掉落,机械手整体回到原位,实现一个自动袋物分离作业周期。
17.以上所述,仅为本实用新型较佳的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型披露的技术范围内,根据本实用新型的技术方案及其实用新型构思加以等同替换或改变,都应涵盖在本实用新型的保护范围之内。
技术特征:
1.一种自动实现包装袋与物料分离的机械手,其特征在于,包括机械手箱体(3),机械手箱体(3)的顶部安装有真空气管接头(2);机械手箱体(3)的内底面上安装有两根平行的导轨(11),两根导轨(11)上分别滑动连接有左滑块(7)、右滑块(10),两块短行程气缸推动板(22)分别与左滑块(7)、右滑块(10)固定连接,每块短行程气缸推动板(22)均通过短行程气缸推动头(6)与短行程气缸(5)连接;两个长行程气缸(4)通过长行程气缸浮动连接头(17)分别与左侧插针连接板(8)、右侧插针连接板(9)连接,机械手箱体(3)的内侧壁上安装有接近开关(19)、接近检测块(20),接近开关(19)、接近检测块(20)位于长行程气缸(4)和长行程气缸浮动连接头(17)的下方;机械手箱体(3)的侧壁开设有气缸气管连接孔(16),机械手箱体(3)的底部中心开设有真空抽气孔(13),位于真空抽气孔(13)两侧的机械手箱体(3)的底部安装有插针固定板,插针固定板内过盈配合安装有插针(14),插针(14)的内侧端设有插针挡板(12),插针挡板(12)固定在机械手箱体(3)的底部,两个插针固定板外环绕有真空海绵吸盘(15),真空海绵吸盘(15)粘接在机械手箱体(3)的底部。2.根据权利要求1所述自动实现包装袋与物料分离的机械手,其特征在于,所述机械手箱体(3)的顶部通过活动接头(1)连接在机械臂上。3.根据权利要求1所述的自动实现包装袋与物料分离的机械手,其特征在于,所述的短行程气缸(5)通过短行程气缸固定架(21)固定在机械手箱体(3)的内底面上。4.根据权利要求1所述的自动实现包装袋与物料分离的机械手,其特征在于,所述的长行程气缸(4)通过长行程气缸固定架(18)固定在机械手箱体(3)的内侧壁上。
技术总结
本实用新型公开了一种自动实现包装袋与物料分离的机械手,机械手箱体的内底面上安装有两根平行的导轨,两根导轨上分别滑动连接有左滑块、右滑块,两块短行程气缸推动板分别与左滑块、右滑块固定连接,每块短行程气缸推动板均通过短行程气缸推动头与短行程气缸连接;两个长行程气缸通过长行程气缸浮动连接头分别与左侧插针连接板、右侧插针连接板连接;位于真空抽气孔两侧的机械手箱体的底部安装有插针固定板,两个插针固定板外环绕有真空海绵吸盘,真空海绵吸盘粘接在机械手箱体的底部。本实用新型取代原始人工作业过程,自动精准、高效实现外包装袋与被包装物料分离,节省了人力投入成本,并保证拆分过程中不会伤及内袋,安全可靠。安全可靠。安全可靠。
技术研发人员:鲍永岩 张壮 姜承琳 王行胜 郭文昕
受保护的技术使用者:大连易派机器人科技有限公司
技术研发日:2022.04.20
技术公布日:2022/8/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。