1.本发明属于仿生教具领域,具体涉及一种脊椎类动物仿生教具。
背景技术:
2.目前科普活动多以课本知识的深层拓展为主,形式较为单一,有关科学知识和动手能力的第二课堂类型越来越受到人们的关注,因为这种类型的第二课堂更易激发学生兴趣、挖掘学生特长,辅助学生及家长了解未来专业,培养专业兴趣,树立远大理想和人生规划,避免扎堆盲从从而全方面的提高其综合能力。
3.目前在玩具领域的数量和种类都偏少,类似的拼装产品有乐高玩具、慧鱼组件等拼装益智玩具,但两者的难度和设计自由度不适宜学校这种科普提高学习为主的场所,同时须购买大批量商业元件,且其多为设计师创造的模型,与课堂内联系较少,不适合做校园内科普产品,加之其无免费的系统教程,对应单一的拼装教程无法培养学生自主能动性。现智能交互、多元融合已经成为了玩具的新兴发展趋势。教具不仅能够实现零件的组装,还可以加入语音功能、变色灯光、运动模块等机构,可以增强教具与人的互动,增加教具寓教于乐的功能,赋予教具更多的形态与动态。
4.经对现有技术文献的检索发现,中国发明专利申请号cn201510234762.2,该技术公开了一种青少年科普教育专用的行走式机械兔,包括兔体主躯架、头部造型构件、内置式仿左眼微型摄像仪、左活动式调距眼眶、仿兔声蜂鸣器兔嘴装置、仿兔须内置遥控天线组件、内置式仿右眼微型摄像仪、右活动式调距眼眶、躯体伸缩支架弹簧、兔体辅躯架、后左腿联动构件、后右腿联动构件、后右横杆联动构件、后左横杆联动构件、后左足滑轮组件、后左滑轮、前左腿联动构件、前右腿联动构件、前左横杆联动构件、前左足滑轮组件、前右足滑轮组件、前左滑轮、前右横杆联动构件、前右滑轮、组合式带蓄电池传动机构和仿白兔造型的绒布外套组成,通过电机驱动,能让该教具运动,并实现相应的声音功能。但是该发明结构较复杂,也不能进行多次拆装,不适合年龄较小的学生。
5.中国专利申请号cn201922154222.x,该技术公开了一种关于steam教育的动物积木教具,包括躯体和五官组件。其通过不同组件内的凹槽内与贯通槽的组合,将各种组件组装在一起,并且一些部件之间可以相对运动。但是该结构相对简单,适合年龄不太大的儿童,也不能体现出生物原有的结构与运动特点。
6.中国专利申请号cn202120844587.x,该技术公开了一种犬类动物外科手术教学用仿真模型,包括躯干和皮肤,躯干的外侧包裹有一层皮肤,躯干的内侧贴合有仿真材料制作的内脏器官,内脏器官的内部包括用于模拟血液在体内循环供应的蠕动泵。但是该发明对于动物的体态运动缺乏展示,而且专业性太强,操作起来难度较大。
技术实现要素:
7.本发明旨在针对上述现有技术的不足,开发一种脊椎类动物仿生教具。本教具采用了脊椎柔性驱动的方式。与传统教具相比,通过柔性材料来实现脊椎的各个方向的运动,
固定孔,1218-肋板,122-绕线盘,123-脊椎电机,124-绳索,13-仿生尾部模块,131-尾部机架,132-齿条,133-尾部长连杆,134-尾部齿轮,135-尾部短连杆,136-尾巴,137-齿轮座,138-尾部固定杆,139-尾部电机,14-连接件,2-仿生上肢模块,21-上肢机架,22-上肢齿轮,23-曲柄,24-仿生翅翼,25-上肢连杆机构,251-滑杆,252-第一滑套,253-第二滑套,254-第一传动杆,255-第二传动杆,256-第一销轴,257-多自由度转动副,2571-基座,2572-转动轴,2573-转动体,2574-自由转动轴,2575-滑孔,258-第二销轴,259-滑动槽,26-上肢电机,3-仿生下肢模块,31-下肢机架,32-下肢齿轮,33-下肢摆杆,34-足部,35-下肢电机,36-下肢连杆机构,361-第一下肢短连杆,362-下肢长连杆,363-第二下肢短连杆。
具体实施方式
25.下面对本发明的实施例作详细说明,本实施例在以本发明技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例,下面以企鹅为例对本发明进行举例说明。
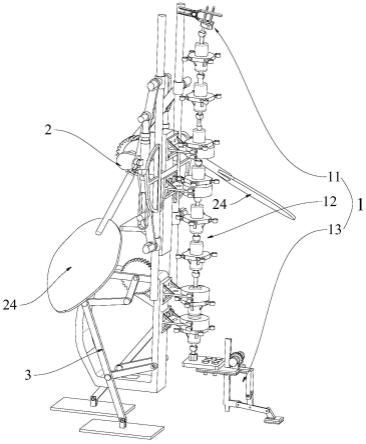
26.如图1至图10所示,本发明提供了一种脊椎类动物仿生教具,包括仿生头-脊椎-尾巴模块1、仿生上肢模块2和仿生下肢模块3;
27.如图2至图4所示,所述仿生头-脊椎-尾模块1包括从上至下依次相连的仿生头部模块11、仿生脊椎模块12和仿生尾部模块13;所述仿生脊椎模块12由多个脊椎单元121依次相连组成,所述脊椎单元121包括单元本体1211、球副壳体1212和卡套1213,所述单元本体1211顶部设有卡槽1214,底部设有球头1215,所述球副壳体1212由两个半壳12121组成,两个半壳12121通过卡套1213固定为一体然后安装在单元本体1211顶部的卡槽1214内,所述单元本体1211底部的球头1215安装在相邻单元本体1211顶部的球副壳体1212内,形成球面副,通过卡套1213对两个半壳12121施加挤压力,使得在外力作用下,球头1215在球副壳体1212内进行球副运动,失去外力作用下,能保持当前位置;所述仿生头部模块11底部设有与最顶部脊椎单元121相连的球头1215;所述仿生尾部模块13的顶部设有用于与最底部脊椎单元121相连的卡槽1214;
28.所述仿生上肢模块2通过连接件14安装在仿生脊椎模块12中上部的单元本体1211上,所述仿生下肢模块3通过连接件14安装在仿生脊椎模块12中下部的单元本体1211上。
29.通过本发明仿生脊椎模块12的设计,使得在外力作用下,本发明仿生脊椎模块12的各脊椎单元121之间能够在球副运动范围内自由摆动,模拟脊椎类动物的脊椎各种变形,并且还能保持形状,进行直观教学观察。
30.作为一种优选实施例,如图5所示,所述仿生尾部模块13包括尾部机架131、齿条132、尾部长连杆133、尾部齿轮134、尾部短连杆135和尾巴136,所述尾部机架131前端设有与最底部脊椎单元121相连的卡槽1214,尾部机架131中部设有上下贯穿的滑槽,所述齿条132能自由上下滑动的安装在滑槽内,所述尾部齿轮134通过齿轮座137安装在尾部机架131上,且与齿条132相啮合;所述尾部机架131后端设有向下延伸的尾部固定杆138,所述齿条132下端与尾部长连杆133一端铰接相连,尾部长连杆133另一端与尾巴136铰接相连,尾部长连杆133中部通过尾部短连杆135与尾部固定杆138下端铰接相连,所述尾部齿轮134通过外力或者尾部电机139驱动转动,尾部齿轮134转动通过齿条132及连杆机构带动尾巴136动作,仿生脊椎类动物尾部动作。
31.作为一种优选实施例,如图5所示,所述脊椎单元121的单元本体1211中部左、右、前、后四个方向分别设有一个固定孔1217,每个脊椎单元121相同一侧的固定孔1217依次通过绳索124相连,尾部机架131上设有四个对应的绕线盘122,每个绳索124下端均绕在相应的绕线盘122上,四个绕线盘122分别通过四个脊椎电机123(图中只画了一个)驱动,组成绳驱机构,通过电机驱动绕线盘122转动,绳索124拉动相应侧的脊椎单元121动作,实现仿生脊椎模块12的柔性动作。
32.作为一种优选实施例,如图4所示,所述脊椎单元121的单元本体1211为圆柱体,圆柱体中部设有固定板1216,固定板1216四周均布四个固定孔1217,固定板1216和圆柱体之间还设有提高强度的肋板1218。
33.需要说明的是,本发明绳驱机构并非必须部件,当没有绳驱机构时,通过手动施力,也可以实现仿生脊椎模块12的仿生动作和模拟教学。
34.作为一种优选实施例,如图6所示,所述仿生头部模块11包括下头部支架111和上头部支架112,上、下头部支架中部通过销轴相连形成剪刀型开合结构,上、下头部支架前端设置为仿脊椎类动物嘴部形状,上、下头部支架后端支架设有使得前端嘴部保持开状态的复位弹簧113,下头部支架111后端底部设有与脊椎单元121相连的球头1215,上头部支架112后端长于下头部支架111,形成便于手压的按压部114,通过手或者外力按压上头部支架112后端,即可模拟嘴部张开动作。
35.作为一种优选实施例,所述下头部支架111后端设有延伸到上头部支架112上方防止上、下头部支架111过度张开的限位框115。
36.作为一种优选实施例,如图7至图9所示,所述仿生上肢模块2包括上肢机架21、上肢齿轮22、两个曲柄23和两个仿生翅翼24,所述上肢机架21背面通过连接件14安装在中上脊椎单元121的单元本体1211上;所述上肢齿轮22安装在上肢机架21中部,并通过上肢电机26驱动,两个曲柄23对称的固定安装在上肢齿轮22两侧,两个仿生翅翼24分别安装在上肢机架21两侧,每个仿生翅翼24均通过上肢连杆机构25与相应侧的曲柄23相连,所述上肢齿轮22通过两个对称的曲柄23及上肢连杆机构25驱动两个仿生翅翼24交替扑动,进行脊椎类动物翅翼运动仿生。
37.作为一种优选实施例,如图8所示,所述上肢连杆机构25包括滑杆251、第一滑套252、第二滑套253、第一传动杆254、第二传动杆255、第二滑套253和多自由度转动副257,所述滑杆251固定安装在相应侧的上肢支架上,所述第一传动杆254中部设有与其垂直的第一销轴256,两个第一传动杆254上下方向相对设置,相对靠近一端通过第二销轴258铰接安装在曲柄23上,相对远离一端分别通过一个第一滑套252安装在滑杆251的上下两端,两个第一滑套252分别在滑杆251上下两端自由上下滑动,两个第一传动杆254分别与相应的第一滑套252铰接相连;所述第二传动杆255上部通过销轴铰接在位于上方的第一传动杆254的第一销轴256上,第二传动杆255下部设有沿其轴向的滑动槽259,所述滑动槽259套设在位于下方的第一传动杆254的第一销轴256上;所述第二滑套253能上下自由滑动的套设在第二传动杆255中部,并且第二传动杆255上下分别设有对第二滑套253极限限位的限位环;所述仿生翅翼24顶部铰接在第二滑套253上,仿生翅翼24中部通过沿其轴向的滑动副安装在多自由度转动副257上,所述多自由度转动副257固定安装在滑杆251外侧的上肢机架21上。
38.本发明通过上肢电机26驱动上肢齿轮22旋转,上肢齿轮22通过曲柄23带动两个第
一传动杆254摆动,两个第一传动杆254的摆动通过第二传动杆255带动仿生翅翼24摆动,仿生翅翼24在多自由度转动副257限位作用下摆动的同时上下滑动,由于两个曲柄23对称设置,因此两个仿生翅翼24刚好交替摆动,模拟脊椎动物,比如企业的翅翼动作。
39.作为一种优选实施例,如图9所示,所述多自由度转动副257包括基座2571、转动轴2572和转动体2573,所述基座2571安装在上肢机架21上,所述转动轴2572能自由转动的安装在基座2571上,所述转动体2573通过转动副(自由转动轴2574)安装在转动轴2572前端的c型槽内,所述转动体2573内设有供仿生翅翼24中部滑过的滑孔2575,所述转动副的轴线与转动轴2572垂直,所述滑孔2575的轴线与转动副的轴线垂直。
40.作为一种优选实施例,如图10所示,所述仿生下肢模块3包括下肢机架31、下肢齿轮32、两个下肢摆杆33和两个足部34,所述下肢机架31背部通过连接件14安装在中下脊椎单元121的单元本体1211上;所述下肢齿轮32安装在下肢机架31顶部,并通过下肢电机35驱动转动(齿轮啮合传动);两个下肢摆杆33分别固定在下肢齿轮32两侧的齿轮轴上,两个足部34安装于下肢机架31两侧,并且每个足部34均通过下肢连杆机构36与相应侧的下肢摆杆33相连,通过选择连个下肢摆杆33的相位,使得两个足部34交替运动。
41.作为一种优选实施例,所述下肢连杆机构36包括第一下肢短连杆361、下肢长连杆362和第二下肢短连杆363,所述第一下肢短连杆361一端铰接在下肢摆杆33外端,另一端铰接在下肢长连杆362顶部,下肢长连杆362底部与足部34铰接相连;所述第二下肢短连杆363一端与下肢长连杆362中部铰接相连,另一端铰接在下肢机架31相应侧底部。
42.本发明通过下肢电机35驱动下肢齿轮32转动,下肢齿轮32通过下肢摆杆33驱动及第一下肢短连杆361、下肢长连杆362和第二下肢短连杆363组成的下肢连杆机构36驱动足部34交替运动,模拟脊椎动物,比如企鹅的行走。
43.本发明的一种脊椎类动物仿生教具,其脊椎驱动形式不仅可以用于本种动物的结构设计,同样适用于其余各种动物仿生教具的制作与展示。该仿生教具不只适用于学校拓展教学,因其具有很大形态拓展性,还适合将其在作为研究动物形态的辅助用具或者是拼装玩具等方面进行应用推广。
44.以上实施方式仅用于说明本发明,而非对本发明的限制。尽管参照实施例对本发明进行了详细说明,本领域的普通技术人员应当理解,对本发明的技术方案进行各种组合、修改或者等同替换,都不脱离本发明技术方案的精神和范围,均应涵盖在本发明的权利要求范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。