1.本发明涉及一种卫星平地技术,特别是一种平地机平地基准面计算方法。
背景技术:
2.相较于其他平地技术,卫星平地技术适用于各种地形,具有不受阳光、风力、地势起伏等外界因素影响的优点,可以非常便捷地进行地形测量、路径规划、设计基准面和土地平整,智能化和自动化程度较高,并且可扩展功能多,有着非常好的工作效率与发展前景。但是,卫星平地系统仍存在以下不足:
3.1)平地系统对于地形的测量过程会对待平整地块造成一定程度的压实,增加了农田平地系统的负荷;
4.2)对于旱地平整作业,地形测量功能具有显著的指导作用。但是,由于水田作业的特殊性,在水田的平整作业中,为防止出现车辙过深的情况,水田平整作业前不宜进行过多的地形测量操作,以免对水田的平整效果造成影响。
技术实现要素:
5.本发明所要解决的技术问题是针对现有技术的上述缺陷,提供一种平地机平地基准面计算方法。
6.为了实现上述目的,本发明提供了一种平地机平地基准面计算方法,其中,包括如下步骤:
7.s100、抬升平地机,使平地机铲尖高于所在地块最高地势,保持机具高度不变,以设定路线匀速空跑一圈;
8.s200、实时获取平地机所经过路线各点的经纬度坐标及高程值,并对数据值进行预处理;
9.s300、根据预处理后的所述数据值求算平地或坡面的平地基准面的实时高程值;以及
10.s400、车载计算机根据经纬度信息将所述实时高程值与基准高程值进行比较,判断位置高低,并通过控制器向液压系统输出对应控制信号,控制平地铲升降。
11.上述的平地机平地基准面计算方法,其中,步骤s300中,若为平面,则对所述平地机所经过路线各点的数据值进行数值积分,并求得数据积分的均值作为平地基准面的高程值。
12.上述的平地机平地基准面计算方法,其中,所述平地机空跑路线为一连续的曲线,所述车载监控终端采集得到n 1个等距离散数据点,位置坐标为(xi,yi,zi),以低于最低点的高度为基准零点,以离散数据点为节点沿直线方向等距展开这条曲线并设相对高程曲线方程为z=f(x),则基准面高度值h0为:
13.14.其中:x为曲线z=f(x)的x轴向位置变量,z为对应位置x处的相对高程值;a、b分别为平面曲线z=f(x)在x轴的起始、结束坐标点;
15.利用复化柯特斯公式和矩形公式对采集得到的所述等距离散数据点进行数值求积,得到的近似值为:
[0016][0017]
其中,zk=f(xk);n=4r l,l<4;
[0018]
xk为等距离散数据点位置,zk为对应的相对高程值;n为数据点个数;l为n 1个数据点利用柯特斯公式以每5个点为一个区间进行数值求积后数据点不足5个的数量,用矩形公式求积;h为一个数值求积区间的长度;r为数值求积的区间个数;k为n 1个数据点在x轴上的位置标识;
[0019]
得到所述基准面高度值h0为:
[0020][0021]
上述的平地机平地基准面计算方法,其中,步骤s300中,若为坡面,则根据最小二乘法,求得所述平地机所经过路线各点的最佳拟合平面作为坡面的平地基准面,并求算所述坡面的平地基准面的高程值。
[0022]
上述的平地机平地基准面计算方法,其中,所述平地机所经过路线各点的位置坐标为(xi,yi,zi),i≤n,n 1为采集点的总数,坡面的平地基准面的方程为z=ax by c(a、b、c为方程的待定系数),由最小二乘法,得到离散点的最佳拟合平面;
[0023]
所述离散点到拟合平面距离的平方和为:
[0024][0025]
分别求a,b,c的偏导,并求得各偏导的极值点:
[0026][0027][0028][0029]
其中:la、lb、lc分别为l方程关于a,b,c的偏导。
[0030]
利用解线性方程组的克莱姆法则,得到a,b,c的值及坡面基准面z=ax by c。
[0031]
上述的平地机平地基准面计算方法,其中,所述设定路线为“∞”路线。
[0032]
上述的平地机平地基准面计算方法,其中,步骤s200中,所述平地机的车载监控终端通过gnss接收机实时获取平地机所经过路线各点的经纬度坐标及高程。
[0033]
上述的平地机平地基准面计算方法,其中,还包括步骤:
[0034]
s500、对地块地势高的地点进行铲土,并把土运送到地势低于基准面的地点填土。
[0035]
本发明的技术效果在于:
[0036]
本发明的卫星平地机平地基准面的计算方法,在地形数据采集路径相对简单、高程数据相对较少的情况下,可以快速、准确地计算平地基准面,减少平地作业工作量与土壤压实度,提高作业效率。
[0037]
以下结合附图和具体实施例对本发明进行详细描述,但不作为对本发明的限定。
附图说明
[0038]
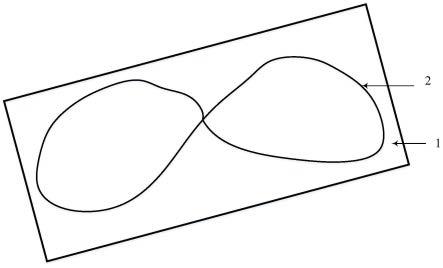
图1为本发明一实施例的地形数据采集轨迹线示意图。
[0039]
其中,附图标记
[0040]1ꢀꢀ
地块
[0041]2ꢀꢀ
路线
具体实施方式
[0042]
下面结合附图对本发明的结构原理和工作原理作具体的描述:
[0043]
参见图1,图1为本发明一实施例的地形数据采集轨迹线示意图。本发明的平地机平地基准面计算方法,包括如下步骤:
[0044]
步骤s100、抬升平地机,使平地机铲尖高于所在地块1最高地势,保持机具高度不变,拖拉机在地块1以“∞”路线2,匀速空跑一圈;
[0045]
步骤s200、平地机车载监控终端通过gnss接收机实时获取平地机所经过路线2各点的经纬度坐标及高程,并对数据值进行预处理;
[0046]
步骤s300、若为平面,则对这些数据点进行数值积分,并求得数据积分的均值,此均值即为平地基准面的高程值;若为坡面,则根据最小二乘法,求得这些数据点的最佳拟合平面,此平面即为坡面的平地基准面;
[0047]
步骤s400、车载计算机根据经纬度信息将实时高程与基准高程进行比较,判断位置高低,并通过控制器向液压系统输出相应控制信号,控制平地铲升降。以及还可包括:
[0048]
步骤s500、对地块1地势高的地点进行铲土,并把土运送到地势低于基准面的地点填土。
[0049]
其中步骤s300的具体数据处理方法如下:
[0050]
若为平面,则采用如下方法:
[0051]
空跑路线2为一连续的曲线,车载监控终端则采集得到n 1个等距离散数据点,位置坐标为(xi,yi,zi),以低于最低点的某高度为基准零点,以离散数据点为节点沿直线方向等距展开这条曲线并设相对高程曲线方程为z=f(x),则基准面高度值h0为:
[0052][0053]
其中:x为曲线z=f(x)的x轴向位置变量,z为对应位置x处的相对高程值;a、b分别为平面曲线z=f(x)在x轴的起始、结束坐标点。
[0054]
利用复化柯特斯公式和矩形公式对采集得到的等距离散数据点进行数值求积,则可得的近似值为:
[0055][0056]
其中:zk=f(xk);n=4r l,l<4;
[0057]
xk为等距离散数据点位置,zk为对应的相对高程值;n为数据点个数;l为n 1个数据点利用柯特斯公式以每5个点为一个区间进行数值求积后数据点不足5个的数量,用矩形公式求积;h为一个数值求积区间的长度;r为数值求积的区间个数;k为n 1个数据点在x轴上的位置标识。
[0058]
则基准面高度h0可表示为:
[0059][0060][0061]
若为坡面,则采用如下方法:
[0062]
沿着地形数据采集路径得到的点的位置坐标为(xi,yi,zi,),i≤n,n 1为采集点的总数。设坡面平地基准面的方程为z=ax by c(a、b、c为方程的待定系数),由最小二乘法,则可得到离散点的最佳拟合平面。
[0063]
根据定义,离散点到拟合平面距离的平方和为:
[0064][0065]
为使l值最小,则分别求关于a,b,c的偏导,并求得各偏导的极值点:
[0066][0067]
其中:la、lb、lc分别为l方程关于a,b,c的偏导。
[0068]
利用解线性方程组的克莱姆法则,得到a,b,c的值及坡面基准面z=ax by c。
[0069]
当然,本发明还可有其它多种实施例,在不背离本发明精神及其实质的情况下,熟悉本领域的技术人员当可根据本发明作出各种相应的改变和变形,但这些相应的改变和变形都应属于本发明所附的权利要求的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
