1.本实用新型涉及一种用于取样检测的自动取样单元,具体是一种适用于对通过原奶罐车运输来的原奶进行自动取样的自动取样单元,属于原奶检测技术领域。
背景技术:
2.奶是多种分子组成的复杂混合物,它具有很高的营养价值,随着人们生活水平的提高,奶及奶制品渐渐的成了人们日常生活中重要的营养品之一。要想生产出优质的奶及奶制品,必须选用优质的原奶。奶站收购的原奶需符合《gb6914—86》的感官指标、理化指标及微生物指标等标准要求,要求以正常饲养的无传染病和乳房炎的健康母牛挤出的常乳,不得有微生物和杂质混合在原奶中,且要求细菌总数小于50万/ml,不得含有青霉素、残留清洗液和消毒剂等阻碍发酵剂正常发酵的物质;牛乳总固形不低于11.5%,含脂率不低于3.2%。
3.奶站收购原奶后通常以原奶罐车灌装运输的方式送至奶制品加工企业,且为保证后续的奶及奶制品质量,奶及奶制品加工企业必须对原奶罐车中的原奶进行严格的入厂检验。原奶检验通常包括感官指标检验、理化指标检验及微生物指标检验,通常是打开原奶罐车顶部的车顶密封盖5进行取样后送至生化室进行检验,且为保证检验的准确性,要求短时间内将盛装有原奶样品的密闭样品瓶送至生化室、以降低外界环境对原奶样品的影响。原奶罐车顶部的车顶密封盖5通常是包括上下连接的内盖和外盖的双层密封盖结构,如图16所示,为了便于快速打开关闭,双层密封盖结构一般采用外盖通过轴向方向水平设置的铰接轴铰接安装在原奶罐车顶部,且外盖通过梅花锁紧螺母51以及铰接安装在原奶罐车顶的、可翻转并沿外盖径向方向卡入外盖锁紧卡口的铰接锁紧螺栓52压实密封锁紧,外盖上还设有便于拉动外盖使其绕铰接轴旋转打开的拉杆53。传统的原奶取样与送样过程通常是人工完成,即取样人员爬至原奶罐车顶部后人工打开车顶密封盖5,再通过舀取工具将原奶取样至原奶样品瓶,将原奶样品瓶交至送样人员进行送样后再将车顶密封盖5复位密封。这种传统的人工取样送样的方式,一方面,作业人员不仅劳动强度大、而且登高作业具有安全隐患;另一方面,取样作业受人为因素影响较大,取样效率与取样人员的作业经验、责任心以及取样人员的疲劳程度有关;再一方面,人工取样的方式在原奶罐车内原奶液面的浅层进行取样比较容易、而在原奶罐车内原奶液面的深层进行取样比较困难,由于浅层原奶在取样时与外界空气接触,其受外界污染的可能性较大,因此浅层原奶取样获得的原奶样品的检测指标与深层原奶的检测指标有可能存在差异。
技术实现要素:
4.针对上述现有技术存在的问题,本实用新型提供一种原奶罐车自动取样单元,针对通过原奶罐车运输来的原奶,能够在实现快速自动取样的前提下实现提高原奶检测的准确性,可以极大降低人为因素对原奶取样送检过程的干扰,特别适用于奶及奶制品加工企业原奶入厂检验的原奶罐车自动化取样系统。
5.为了实现上述目的,本原奶罐车自动取样单元设置在取样平台上,包括行走底盘、工具台架、取样抓取码放机械臂、采样台架和自动取样电控装置;
6.行走底盘是通过直线导轨坐标移动的rgv结构;
7.固定安装在行走底盘上的工具台架用于定位码放取样工具,取样工具包括车顶密封盖启闭工具、打捞耙、搅拌杆和采样工具;
8.安装在行走底盘上的取样抓取码放机械臂包括用于坐标移动的坐标驱动总成,取样抓取码放机械臂的末节臂端部设有取样抓取码放机械手,取样抓取码放机械手上设有包括两个可开合设置的夹持指的夹持组件,夹持指铰接安装在取样抓取码放机械手上、且夹持指与夹持指开合控制机构传动连接;
9.采样台架固定安装在行走底盘上,包括用于平移交接样品瓶的承接台和定位设置在承接台上方的漏斗组件,承接台的台面是包括台面输送带驱动部件的台面平移循环带式输送结构,漏斗组件包括漏斗体;
10.自动取样电控装置包括自动取样控制器和自动取样控制回路,自动取样控制器分别与行走底盘、取样抓取码放机械臂、取样抓取码放机械手和承接台的台面输送带驱动部件电连接。
11.作为本实用新型的进一步改进方案,取样抓取码放机械臂的坐标驱动总成至少包括控制沿水平左右方向移动的x坐标驱动总成、控制沿水平前后方向移动的y坐标驱动总成和控制沿竖直上下方向移动的z坐标驱动总成,取样抓取码放机械手通过可绕x坐标轴旋转的a坐标驱动总成和/或可绕y坐标轴旋转的b坐标驱动总成安装在取样抓取码放机械臂上。
12.作为本实用新型的进一步改进方案,车顶密封盖启闭工具包括梅花锁紧螺母旋转机械手,梅花锁紧螺母旋转机械手至少包括可沿竖直上下方向移动的z坐标驱动总成和可绕z坐标轴旋转的c坐标驱动总成,梅花锁紧螺母旋转机械手上设有多个沿周向方向均布设置的夹持卡爪、且夹持卡爪通过沿梅花锁紧螺母旋转机械手径向方向伸缩设置的卡爪伸缩控制部件安装在梅花锁紧螺母旋转机械手上,自动取样控制器与车顶密封盖启闭工具的梅花锁紧螺母旋转机械手电连接。
13.作为本实用新型的进一步改进方案,采样工具的杆体底端设有定量采样桶。
14.作为本实用新型的进一步改进方案,采样工具底端的定量采样桶包括重锤底板,重锤底板通过上大下小的锥面配合连接结构与定量采样容器连接、且定量采样桶内部设有可保持重锤底板沿定量采样桶轴向方向运动的保持机构;漏斗组件漏斗体的漏斗大口端对应重锤底板的位置定位设有竖直向上伸出设置的顶杆。
15.作为本实用新型的进一步改进方案,取样平台上还设有盛装有可定期更换的清水的清水箱和盛装有可定期更换的消毒液的消毒箱。
16.作为本实用新型的进一步改进方案,搅拌杆是空心管结构、且搅拌杆的顶端通过软管与氮气输入源连接。
17.作为本实用新型的进一步改进方案,取样抓取码放机械手和/或行走底盘上还设有视觉检测探头。
18.作为本实用新型的进一步改进方案,漏斗组件包括多个沿承接台的输送方向并排设置的漏斗体。
19.作为本实用新型的进一步改进方案,承接台上还设有沿其输送方向设置的样品瓶
导向定位机构。
20.与现有技术相比,本原奶罐车自动取样单元用于对原奶罐车进行自动取样、并将原奶样品注入由样品瓶升降输送单元输出的样品空瓶内后再输出至样品瓶升降输送单元,对原奶罐车进行自动取样过程中,通过取样抓取码放机械手抓取车顶密封盖启闭工具进行动作可以实现将车顶密封盖打开,通过取样抓取码放机械手抓取打捞耙进行动作可以实现对罐内原奶表层进行打捞,通过取样抓取码放机械手抓取搅拌杆进行动作可以实现对罐内原奶进行均匀搅拌,通过取样抓取码放机械手抓取抓取采样工具进行动作可以实现对罐内原奶进行取样、并通过漏斗组件将定量采样桶内的原奶样品注入到空样品瓶中,可以实现在对原奶罐车中的原奶进行快速自动取样并送样的前提下实现提高原奶检测的准确性,可以极大降低人为因素对原奶取样送检过程的干扰,特别适用于奶及奶制品加工企业原奶入厂检验的原奶罐车自动化取样系统。
附图说明
21.图1是原奶罐车自动化取样系统的三维结构示意图;
22.图2是图1的主视图;
23.图3是原奶罐车自动化取样系统样品瓶收发装置及样品瓶启闭瓶盖装置外保护瓶启闭瓶盖部分的三维结构示意图;
24.图4是原奶罐车自动化取样系统样品瓶启闭瓶盖装置内样品瓶启闭瓶盖部分的三维结构示意图;
25.图5是原奶罐车自动化取样系统喷码装置的三维结构示意图;
26.图6是原奶罐车自动化取样系统冰箱、外保护瓶缓存架、内样品瓶缓存架和保存样品清理装置的三维结构示意图;
27.图7是原奶罐车自动化取样系统样品瓶升降输送单元的三维结构示意图;
28.图8是图7的局部放大视图;
29.图9是本实用新型的三维结构示意图;
30.图10是本实用新型工具台架的三维结构示意图;
31.图11是本实用新型采样工具定量采样桶的结构示意图;
32.图12是本实用新型车顶密封盖启闭工具的三维结构示意图;
33.图13是本实用新型采样台架的三维结构示意图;
34.图14是本实用新型取样抓取码放机械手的三维结构示意图;
35.图15是采用原奶罐车自动化取样系统对原奶罐车进行自动取样时的三维结构示意图;
36.图16是原奶罐车车顶密封盖的三维结构示意图。
37.图中:1、样品瓶气动输送单元,11、气动输送管路,2、样品瓶处理单元,21、样品瓶收发装置,211、底托板,212、底托板升降机构,22、样品瓶启闭瓶盖装置,221、夹瓶机构,2211、夹持伸缩缸,2212、夹持卡头,222、旋盖机构,2221、旋盖支撑架,2222、旋盖机械手,23、样品瓶抓取码放机械臂,231、样品瓶抓取码放机械手,24、喷码装置,25、冰箱,26、保存样品清理装置,3、样品瓶升降输送单元,31、升降台,32、升降台升降控制装置,4、自动取样单元,41、行走底盘,42、工具台架,421、车顶密封盖启闭工具,422、采样工具,4221、重锤底
板,4222、保持机构,43、取样抓取码放机械臂,431、取样抓取码放机械手,44、采样台架,441、承接台,442、漏斗组件,4421、顶杆,5、车顶密封盖,51、梅花锁紧螺母,52、铰接锁紧螺栓,53、拉杆。
具体实施方式
38.下面以设置有本原奶罐车自动取样单元的原奶罐车自动化取样系统为例、结合附图对本实用新型做进一步说明。
39.如图1、图2所示,原奶罐车自动化取样系统包括样品瓶气动输送单元1、样品瓶处理单元2、样品瓶升降输送单元3、自动取样单元4和集中电控单元。
40.样品瓶气动输送单元1包括气动输送管路11和样品瓶气动输送电控装置,内径尺寸与样品瓶外径尺寸配合设置的气动输送管路11与可产生正压或负压的风源连接,样品瓶气动输送电控装置包括样品瓶气动输送控制器,样品瓶气动输送控制器与风源电连接,通过正压送风推动位于气动输送管路11内的样品瓶移动、或者通过负压吸风拉动位于气动输送管路11内的样品瓶移动。
41.固定安装在地面的样品瓶处理单元2包括样品瓶收发装置21、样品瓶启闭瓶盖装置22、样品瓶交接装置、喷码装置24和样品瓶处理电控装置;
42.如图3所示,样品瓶收发装置21用于对自气动输送管路11输送来的盖有瓶盖的样品空瓶进行自动承接、或者将盛装有原奶样品的盖有瓶盖的样品瓶自动送入气动输送管路11,样品瓶收发装置21包括与竖直设置的气动输送管路11的收发端口对应设置的底托板211以及与底托板211连接的底托板升降机构212,底托板升降机构212可以是伸缩缸结构、也可以是齿轮齿条结构等其他直线往复运动结构,对自气动输送管路11输送来的盖有瓶盖的样品空瓶进行自动承接时,底托板211处于高位呈贴近气动输送管路11收发端口的状态,自气动输送管路11输送来的盖有瓶盖的样品空瓶可被正压风送至底托板211上,控制底托板升降机构212的降下动作可以实现底托板211托载着样品空瓶降下至设定低位位置、实现自动承接,将盛装有原奶样品的盖有瓶盖的样品瓶自动送入气动输送管路11时,盛装有原奶样品的盖有瓶盖的样品瓶被送至处于低位位置的底托板211上,控制底托板升降机构212的升起动作可以实现底托板211托载着盛装有原奶样品的盖有瓶盖的样品瓶升起至设定高位位置、实现将其送入负压风的气动输送管路11收发端口;
43.如图3、图4所示,样品瓶启闭瓶盖装置22通过贯穿样品瓶启闭瓶盖装置22的样品瓶平移输送机构与样品瓶收发装置21对接,样品瓶平移输送机构可以是通过整个链带或输送带实现平移输送样品瓶的带式输送结构、也可以是通过传动链带动拨齿或推板实现平移输送样品瓶的传动链推送式输送结构等其他平移输送结构,样品瓶启闭瓶盖装置22包括水平设置的夹瓶机构221和竖直设置的旋盖机构222;夹瓶机构221包括伸缩方向垂直于样品瓶平移输送机构输送方向设置的夹持伸缩缸2211,夹持伸缩缸2211的伸缩端设有与样品瓶的瓶体尺寸配合的夹持卡头2212,夹持伸缩缸2211可以单边设置为一件、也可以双边对置设置为两件,通过控制夹持伸缩缸2211的伸缩动作可以实现夹持卡头2212的合毕夹持状态或分离放行状态;旋盖机构222包括旋盖支撑架2221和安装在旋盖支撑架2221上的旋盖机械手2222,旋盖机械手2222对应夹持卡头2212合毕夹持状态时的夹持中心设置、且旋盖机械手2222至少通过可沿竖直上下方向移动的z坐标驱动总成和可绕z坐标轴旋转的c坐标驱
动总成安装在旋盖支撑架2221上,旋盖机械手2222上设有多个沿周向方向均布设置的夹持卡爪、且夹持卡爪通过沿旋盖机械手2222径向方向伸缩设置的卡爪伸缩控制部件安装在旋盖机械手2222上,卡爪伸缩控制部件可以是直线运动的伸缩缸、也可以是旋转运动的驱动电机,通过控制卡爪伸缩控制部件的动作可以实现多个夹持卡爪同步缩入的夹持状态或同步伸出的非夹持状态;
44.样品瓶交接装置用于样品瓶处理单元2与样品瓶升降输送单元3之间的样品瓶交接,样品瓶交接装置可以直接是与样品瓶升降输送单元3对接设置的样品瓶平移输送机构、通过平移输送的方式进行样品瓶的交接,也可以是单独设置的具有样品瓶抓取码放机械手231的样品瓶抓取码放机械臂23、通过抓取码放样品瓶的方式进行样品瓶的交接;
45.如图5所示,喷码装置24对应样品瓶平移输送机构的输送方向沿样品瓶平移输送机构设置,用于根据检测项目对盛装有原奶样品的盖有瓶盖的样品瓶进行喷码;
46.样品瓶处理电控装置包括样品瓶处理控制器、样品瓶收发控制回路、样品瓶输送控制回路、样品瓶启闭瓶盖控制回路和样品瓶喷码控制回路,样品瓶处理控制器分别与底托板升降机构212、样品瓶平移输送机构、夹持伸缩缸2211、旋盖机械手2222、样品瓶交接装置和喷码装置24电连接。
47.如图7所示,样品瓶升降输送单元3包括安装在升降台架上的升降台31、升降台升降控制装置32和样品瓶升降输送电控装置;如图8所示,升降台31的台面是包括台面输送带驱动部件的台面平移循环带式输送结构,为保证升降过程中样品瓶的定位,升降台31上还设有样品瓶夹持定位机构,样品瓶夹持定位机构可以是如图8所示的定位杆结构、也可以是定位板条结构等结构;升降台升降控制装置32包括升降台升降驱动部件,升降台升降驱动部件可以是升降液压缸结构、通过液压控制升降液压缸的方式控制升降台31的升降,升降台升降驱动部件也可以是驱动电机结构、通过驱动电机带动传动链或传动带的方式控制升降台31的升降;样品瓶升降输送电控装置包括样品瓶升降输送控制器和样品瓶升降输送控制回路,样品瓶升降输送控制器分别与升降台31的台面输送带驱动部件和升降台升降控制装置32的升降台升降驱动部件电连接。
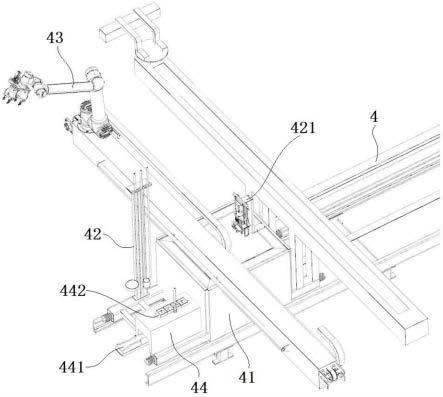
48.自动取样单元4通过取样平台水平架设安装在样品瓶处理单元2的上方,如图9所示,自动取样单元4包括行走底盘41、工具台架42、取样抓取码放机械臂43、采样台架44和自动取样电控装置;
49.行走底盘41包括车轮和与车轮传动连接的车轮驱动机构,车轮驱动机构可以是电动机驱动的电控驱动结构、也可以是液压马达驱动的液压驱动结构等驱动结构,通过控制车轮驱动机构可以实现行走底盘41的坐标移动;为了简化机构设置,行走底盘41可以是不设置转向机构的直线往复移动模式,为进一步实现准确坐标移动,行走底盘41可以是通过直线导轨坐标移动的rgv结构、也可以是基于激光导航或视觉导航或磁条导航坐标移动的agv结构;
50.如图10所示,固定安装在行走底盘41上的工具台架42用于定位码放取样工具,取样工具包括用于打开原奶罐车车顶密封盖5的车顶密封盖启闭工具421、用于打捞异物的打捞耙、用于搅拌的搅拌杆、用于采样的采样工具422等,打捞耙、搅拌杆和采样工具422上还可以设置温度传感器;如图12所示,车顶密封盖启闭工具421包括梅花锁紧螺母旋转机械手,梅花锁紧螺母旋转机械手至少包括可沿竖直上下方向移动的z坐标驱动总成和可绕z坐
标轴旋转的c坐标驱动总成,梅花锁紧螺母旋转机械手上设有多个沿周向方向均布设置的夹持卡爪、且夹持卡爪通过沿梅花锁紧螺母旋转机械手径向方向伸缩设置的卡爪伸缩控制部件安装在梅花锁紧螺母旋转机械手上,卡爪伸缩控制部件可以是直线运动的伸缩缸、也可以是旋转运动的驱动电机,通过控制卡爪伸缩控制部件的动作可以实现多个夹持卡爪同步缩入的夹持状态或同步伸出的非夹持状态;如图11所示,采样工具422底端设有定量采样桶;
51.安装在行走底盘41上的取样抓取码放机械臂43至少包括控制沿水平左右方向移动的x坐标驱动总成、控制沿水平前后方向移动的y坐标驱动总成和控制沿竖直上下方向移动的z坐标驱动总成,取样抓取码放机械臂43可以采用如图9所示的关节机械臂结构、也可以采用门式桁架机械臂结构等其他机械臂结构;如图14所示,取样抓取码放机械臂43的末节臂端部设有通过可绕x坐标轴旋转的a坐标驱动总成和/或可绕y坐标轴旋转的b坐标驱动总成安装在取样抓取码放机械臂43上的取样抓取码放机械手431,取样抓取码放机械手431上设有包括两个可开合设置的夹持指的夹持组件,夹持指铰接安装在取样抓取码放机械手431上、且夹持指与夹持指开合控制机构传动连接,夹持指开合控制机构可以是通过液压缸控制的液压控制结构、也可以是通过气缸控制的气动控制结构、或者是通过电动缸控制的电控结构等其他开合控制结构,为实现稳固夹持,夹持组件可并列设置为两组,为实现定位捕捉图像画面以及准确定位夹持,取样抓取码放机械手431和/或行走底盘41上还设有视觉检测探头;
52.如图13所示,采样台架44固定安装在行走底盘41上,包括可与升降台31对接的承接台441和定位设置在承接台441上方的漏斗组件442,承接台441的台面也是包括台面输送带驱动部件的台面平移循环带式输送结构,为保证样品瓶准确定位承接漏斗组件442,承接台441上还设有样品瓶导向定位机构,样品瓶导向定位机构可以是如图13所示的定位杆结构、也可以是定位板条结构等结构;漏斗组件442可以包括多个并排设置的漏斗体(如图13所示为四个);
53.自动取样电控装置包括自动取样控制器和自动取样控制回路,自动取样控制器分别与行走底盘41的车轮驱动机构、取样抓取码放机械臂43的坐标驱动总成、取样抓取码放机械手431的坐标驱动总成、取样抓取码放机械手431的夹持指开合控制机构、车顶密封盖启闭工具421的梅花锁紧螺母旋转机械手和承接台441的台面输送带驱动部件电连接。
54.集中电控单元包括中央控制器,中央控制器分别与样品瓶气动输送单元1的样品瓶气动输送控制器、样品瓶处理单元2的样品瓶处理控制器、样品瓶升降输送单元3的样品瓶升降输送控制器和自动取样单元4的自动取样控制器电连接。
55.为了防止样品瓶通过气动输送管路11进行气动输送过程中因振动等原因造成瓶盖的意外松动、进而造成原奶样品渗漏污染气动输送管路11的现象,进一步的,样品瓶是包括配套设置的外保护瓶和内样品瓶的双瓶结构,且外保护瓶和内样品瓶均分别具有可拆卸的瓶盖;气动输送管路11的内径尺寸与外保护瓶的外径尺寸配合设置;如图3、图4所示,样品瓶启闭瓶盖装置22包括外保护瓶启闭瓶盖部分和内样品瓶启闭瓶盖部分,如图1、图2所示,样品瓶交接装置包括具有样品瓶抓取码放机械手231的样品瓶抓取码放机械臂23,样品瓶抓取码放机械臂23至少包括控制沿水平左右方向移动的x坐标驱动总成、控制沿水平前后方向移动的y坐标驱动总成和控制沿竖直上下方向移动的z坐标驱动总成,样品瓶抓取码
放机械臂23可以采用如图1、图2所示的关节机械臂结构、也可以采用门式桁架机械臂结构等其他机械臂结构,样品瓶抓取码放机械手231通过可绕x坐标轴旋转的a坐标驱动总成和/或可绕y坐标轴旋转的b坐标驱动总成安装在样品瓶抓取码放机械臂23的末节臂端部,样品瓶抓取码放机械手231上设有包括两个可开合设置的夹持指的夹持组件,夹持指铰接安装在样品瓶抓取码放机械手231上、且夹持指与夹持指开合控制机构传动连接,夹持指开合控制机构可以是通过液压缸控制的液压控制结构、也可以是通过气缸控制的气动控制结构、或者是通过电动缸控制的电控结构等其他开合控制结构,为实现定位捕捉图像画面以及准确定位夹持,样品瓶抓取码放机械手231上也还设有视觉探头,样品瓶抓取码放机械臂23的坐标驱动总成、样品瓶抓取码放机械手231的坐标驱动总成和样品瓶抓取码放机械手231的夹持指开合控制机构分别与样品瓶处理控制器电连接。在样品瓶启闭瓶盖装置22的外保护瓶启闭瓶盖部分将外保护瓶的瓶盖打开后,可以通过样品瓶抓取码放机械臂23将内样品瓶自外保护瓶内部取出后码放至样品瓶启闭瓶盖装置22的内样品瓶启闭瓶盖部分打开内样品瓶的瓶盖,然后将内样品瓶交接至样品瓶升降输送单元3进行后续的样品采集;反之,采集有原奶样品的内样品瓶可以通过样品瓶抓取码放机械臂23码放入外保护瓶、并通过样品瓶启闭瓶盖装置22的外保护瓶启闭瓶盖部分加盖瓶盖,最后通过样品瓶收发装置21送入气动输送管路11。
56.为了避免后续的检测争议,需对部分同一原奶罐车采集的原奶样品进行设定时间的保存,因此进一步的,如图1、图2、图6所示,样品瓶处理单元2还包括冰箱25、外保护瓶缓存架、内样品瓶缓存架和保存样品清理装置26,保存样品清理装置26包括样品倾倒槽和喷淋消毒机构;采集有原奶样品的内样品瓶可通过样品瓶抓取码放机械臂23依次码放入冰箱25内进行冷冻保存,与内样品瓶配套的外保护瓶可通过样品瓶抓取码放机械臂23依次码放在外保护瓶缓存架上进行缓存,至设定的保存时间后,可通过样品瓶抓取码放机械臂23将冰箱25内的内样品瓶取出后码放在内样品瓶缓存架上进行解冻,解冻并开盖后可通过样品瓶抓取码放机械臂23将内样品瓶中的原奶样品倾倒入保存样品清理装置26的样品倾倒槽、并进行临时喷淋消毒,然后将临时消毒后的内样品瓶码放至样品瓶启闭瓶盖装置22的内样品瓶启闭瓶盖部分加盖瓶盖,再将盖有瓶盖的内样品瓶通过样品瓶抓取码放机械臂23码放入外保护瓶、并通过样品瓶启闭瓶盖装置22的外保护瓶启闭瓶盖部分加盖瓶盖,最后通过样品瓶收发装置21送入气动输送管路11分流至实验室进行再次消毒。
57.为了在一次取样采集后对打捞耙、搅拌杆、取样工具等工具进行消毒清理,进一步的,如图1、图2所示,自动取样单元4的取样平台上或样品瓶升降输送单元3的升降台架上还设有盛装有可定期更换的清水的清水箱和盛装有可定期更换的消毒液的消毒箱。在打捞耙、搅拌杆、取样工具等工具以及漏斗组件442使用后,可通过取样抓取码放机械臂43将其先置入消毒箱进行消毒后、再置入清水箱进行清洗,以避免交叉污染。
58.为了在取样前对原奶罐车内的原奶进行均匀搅拌、以获得更准确的原奶样品,进一步的,搅拌杆是空心管结构、且搅拌杆的顶端通过软管与氮气输入源连接,即,通过取样抓取码放机械手431抓取搅拌杆进行机械运动搅拌的同时、通过输入的氮气进行进一步搅拌,从而可以实现更均匀的搅拌效果。
59.为了简化采样过程、提高取样效率,进一步的,如图11所示,采样工具422底端的定量采样桶包括重锤底板4221,重锤底板4221通过上大下小的锥面配合连接结构与定量采样
容器连接、且定量采样桶内部设有可保持重锤底板4221沿定量采样桶轴向方向运动的保持机构4222,保持机构4222可以是如图11所示的可限制重锤底板4221翻转的限位块结构、也可以是配合设置在重锤底板4221和定量采样桶内壁上的导向槽及导向凸起结构等其他结构;如图13所示,漏斗组件442漏斗体的漏斗大口端对应重锤底板4221的位置定位设有竖直向上伸出设置的顶杆4421。如此设置,在通过取样抓取码放机械手431抓取着采样工具422进行采样时,只需竖直上下运动使定量采样桶没入原奶液面以下,原奶压力作用即可推动重锤底板4221沿定量采样桶轴向方向向上运动实现定量采样桶底端开启,待定量采样桶内部灌满原奶后,重锤底板4221可在自身重力作用下复位实现闭合;在取样抓取码放机械手431抓取着采样工具422进行取样时,只需对正漏斗组件442后竖直向下运动设定距离即可使重锤底板4221被顶杆4421顶开实现定量采样桶开启、定量采样桶内的原奶样品即可流入漏斗组件442的漏斗体中。
60.为了提高取样效率,进一步的,如图1、图2、图15所示,自动取样单元4相对于样品瓶升降输送单元3对称设置为两套,两套自动取样单元4共用同一个样品瓶升降输送单元3。
61.原奶罐车自动化取样系统的中央控制器可以与奶及奶制品加工企业的数字总线进行连接实现集中数字化管理。原奶罐车自动化取样系统初始状态时,自动取样单元4的行走底盘41位于与样品瓶升降输送单元3对接的状态、升降台31位于样品瓶升降输送单元3底层的交接位置,具体的工作流程如下:
62.原奶罐车进厂后可根据sap系统中的采集任务号触发本原奶罐车自动化取样系统,原奶罐车根据具体采样地址停滞在指定的取样工位;
63.如图15所示,原奶罐车停滞在指定的取样工位后,进行取样确认程序,中央处理器通过视觉检测探头自动拍照识别车辆车牌、并与sap系统中的信息进行比对,判断拉运时间的符合性,如出现异常结果自动识别报警,报警状态后检测人员可以人为选择停止/继续,或依据设定程序实现不同环节分别自动执行停止/继续,数据信息自动保存并上传至lims系统;中央控制器控制行走底盘41启动并沿取样平台往返巡航,通过视觉检测探头自动对原奶罐车车顶密封盖5进行拍照并定位车顶密封盖5的具体坐标位置,自动判定车顶密封盖5的铅封或锁是否正常以及车体卫生的符合性,如出现异常结果则自动识别报警,报警状态后检测人员可以选择停止/继续,或依据设定程序实现不同环节分别自动执行停止/继续;数据信息自动保存并上传至lims系统;
64.取样确认程序后进行取样程序,中央控制器控制行走底盘41回到初始位置,然后控制取样抓取码放机械臂43依次将浸泡在消毒箱中的打捞耙、搅拌杆、采样工具422等工具以及漏斗组件442抓取到清水箱中冲洗,冲洗后分别抓取到工具台架42和采样台架44上;中央控制器根据车顶密封盖5的具体坐标位置控制行走底盘41移动并定位至车顶密封盖5附近,自动匹配蓝牙锁信息后打开车顶密封盖5的蓝牙锁;中央控制器控制取样抓取码放机械手431抓取车顶密封盖启闭工具421后通过梅花锁紧螺母旋转机械手旋松车顶密封盖5上的梅花锁紧螺母51,然后坐标移动推动铰接锁紧螺栓52使其沿铰接中心翻转让位脱离车顶密封盖5的外盖锁紧卡口,中央控制器控制取样抓取码放机械手431将车顶密封盖启闭工具421放回工具台架42后,控制取样抓取码放机械手431稳固夹持车顶密封盖5的拉杆53、并坐标移动使车顶密封盖5绕其铰接轴翻转打开,即完成车顶密封盖5的打开工作,同时数据信息自动保存并上传至lims系统;
65.然后中央控制器通过视觉检测探头先对罐内原奶表层进行图像采集,然后中央控制器控制取样抓取码放机械手431抓取打捞耙并坐标移动、对罐内原奶表层进行打捞并对打捞耙上的原奶脂进行图像采集,然后将采集的原奶表层图像和原奶脂图像与内置的标准原奶表层图像和原奶脂图像核对符合性、并上传至lims系统,同步图像存档48小时,对事先录入到lims系统中的空样品罐档案进行自动识别是否为空罐;打捞耙上的温度传感器在打捞时可自动测量原奶温度,将结果上传至lims系统与设定的原奶检测温度范围比对,存在异常可终止流程并系统报警,数据信息自动保存并上传至lims系统;
66.以上步骤都满足采集要求后,中央控制器控制行走底盘41回到初始位置,取样平台下层的样品瓶处理单元2通过样品瓶收发装置21将气动输送管路11输送来的设定容量的空样品瓶进行承接、并输送至样品瓶启闭瓶盖装置22进行开瓶盖,开瓶盖后的空样品瓶通过样品瓶交接装置码放至升降台31上,可针对微生物样品、理化样品及留样样品一次码放四个空样品瓶,然后中央控制器先控制升降台31载着空样品瓶提升至取样平台、再控制升降台31和承接台441的台面输送带驱动部件同时同向输送,空样品瓶即转载至承接台441上、并位于漏斗组件442的正下方待命;中央控制器控制行走底盘41移动并定位至车顶密封盖5附近后控制取样抓取码放机械手431抓取搅拌杆并坐标移动将其插入至罐底部,机械搅拌的同时通氮气搅拌;搅拌后,中央控制器控制取样抓取码放机械手431抓取采样工具422并坐标移动将其插入至罐内液面高度一半的位置通过定量采样桶进行定量取样,取样后坐标移动至漏斗组件442上方、并通过漏斗组件442将定量采样桶内的原奶样品注入到空样品瓶中,依次完成针对微生物样品、理化样品及留样样品的四个样品;然后中央控制器控制行走底盘41回到初始位置,并控制升降台31和承接台441的台面输送带驱动部件同时反向输送,盛装有原奶样品的样品瓶即转载至升降台31上,升降台31降下复位后待命,同时中央控制器控制取样抓取码放机械手431依次将取样工具放至清水箱中冲洗后浸泡在消毒箱中待命,完成同一原奶罐车的全部取样任务后,中央控制器控制取样抓取码放机械手431将车顶密封盖5关闭;
67.中央控制器控制样品瓶交接装置将升降台31上的盛装有原奶样品的样品瓶按原位置依次放回样品瓶启闭瓶盖装置22进行加盖瓶盖,完成盖瓶盖的盛装有原奶样品的样品瓶通过样品瓶平移输送机构输送至喷码装置24进行码贴标机、赋予每份样品唯一标识(二维码或条形码),打码贴标信息来自lims系统;需要发送至实验室的完成打码贴标的样品瓶通过样品瓶抓取码放机械臂23一一对应放置在自带rfid卡的外保护瓶内、并通过样品瓶启闭瓶盖装置22的外保护瓶启闭瓶盖部分加盖瓶盖,通过读写卡器将内样品瓶和外保护瓶与传送瓶信息绑定实现全过程样品的追溯,根据lims系统指令通过样品瓶收发装置21分别发到各指定化验室,数据信息自动保存并上传至lims系统,消毒过的洁净样品空瓶从化验室沿气动输送管路11返回;需备份的完成打码贴标的样品瓶经司机电子签名后由样品瓶抓取码放机械臂23一一对应放置在冰箱25的托盘中,分日期冰冻保存,保存计时到达留样时间(8天)后通过样品瓶抓取码放机械臂23取出后码放在内样品瓶缓存架上进行解冻,解冻后通过样品瓶抓取码放机械臂23码放至样品瓶启闭瓶盖装置22的内样品瓶启闭瓶盖部分进行开盖,然后通过样品瓶抓取码放机械臂23将瓶内的原奶样品倾倒入保存样品清理装置26的样品倾倒槽、并进行临时喷淋消毒,然后将临时消毒后的内样品瓶码放至样品瓶启闭瓶盖装置22的内样品瓶启闭瓶盖部分加盖瓶盖,再将盖有瓶盖的内样品瓶通过样品瓶抓取码
放机械臂23码放入外保护瓶、并通过样品瓶启闭瓶盖装置22的外保护瓶启闭瓶盖部分加盖瓶盖,最后通过样品瓶收发装置21送入气动输送管路11分流至实验室进行彻底消毒,数据信息自动保存并上传至lims系统。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。