1.本实用新型涉及机器人技术领域,具体涉及一种能够多维空间作业的新型机器人。
背景技术:
2.随着科学技术的不断发展,移动机器人得到了广泛的应用,其优势是:可替代越来越高的人力成本,耐用度高、无疲倦感,而且可在污染环境、危险环境中执行任务,以及可执行对人体有伤害的任务。但是,在一些现场环境极其恶劣场景下,需要机器人不仅实现地面行走,还需要进行壁面吸附及动力驱动,尤其是可实现直角壁面之间的快速过渡(从地面直接运动到竖直壁面),这对机器人的设计提出很高要求。
技术实现要素:
3.1.所要解决的技术问题:
4.针对上述技术问题,本实用新型提供一种能够多维空间作业的新型机器人,改善现有机器人难以同时满足多维空间运动的弊端,提升现有机器人运动效率。以该机器人为平台,可广泛应用于复杂环境条件下的搜救、监视和壁面作业等工作领域。
5.2.技术方案:
6.一种能够多维空间作业的新型机器人,其特征在于:包括车架结构与控制电路;所述车架结构包括车架、四个车轮以及两个推进涵道;以车架延伸的方向为x轴方向, y轴方向与车架延伸的方向垂直;所述车架沿x轴方向的前后端均设置为中空框架,中空框架上端均安装推进涵道;所述推进涵道包括环形框架及位于环形框架中间的涵道风扇;所述环形框架可旋转的连接至车架的上表面,其中空的部分与车架的中空部分对应;所述环形框架的旋转轴的方向为y轴方向;所述涵道风扇可旋转的安装于框架中间,所述涵道风扇的旋转轴方向为x轴方向;所述车架下表面车架与车轮之间设置车架减震装置。
7.所述控制电路包括主控芯片、控制前面两个车轮运动的两个对应的y轴舵机及其控制电路、控制每个环形框架旋转轴转动的对应的y舵机及其控制电路、控制每个涵道风扇旋转轴转动的对应的x舵机及其控制电路、姿态传感器、激光测距传感器以及无线通讯模块;所述轴舵机及其控制电路、无刷电机及其控制电路、x轴舵机及其控制电路、姿态传感器、激光测距传感器以及无线通讯模块均与主控芯片相连。
8.还包括遥控器;所述遥控器包括单片机stc89c52rc、4
×
4矩阵键盘、液晶显示屏lcd1602以及无线收发器芯片nrf24l01;所述4
×
4矩阵键盘输入指令至单片机stc89c52rc;单片机stc89c52rc通过与之相连的无线收发器芯片nrf24l01将指令传输至控制电路;显示屏显示机器人当前工作状态。
9.进一步地,所述控制电路的具体型号为:主控芯片的型号为stc89c52rc、无线通讯模块为nrf24l01、姿态传感器为jy61-mpu6050、舵机均为sg90-9g、舵机控制电路的电路板为wtservo16、无刷电机为x2216-kv2400、无刷电机控制电路的电路板为sky walker-60a。
10.3.有益效果:
11.(1)本实用新型的机器人通过设置与其车架两边的车轮实现水平移动,通过设置车架上方的可调风向的推进涵道实现机器人各个方向上的移动;推进涵道的风扇旋转后产生旋翼推力可以实时抵消机器人的重力,实现机器人在垂直壁面行走。如果产生的旋翼推力大于机器人的重力从而能够实现其在天花板上行走。通过调节两个推进涵道旋转后产生的旋翼推力的大小与方向从而能够实现其在多维空间的运动。
12.(2)本实用新型中的控制电路中,执行端由stc89c52rc、nrf24l01、jy61-mpu6050、wtservo16控制板、sg90-9g舵机、sky walker-60a、x2216-kv2400等组成。nrf24l01负责接收控制指令;stc89c52rc将控制指令及jy61-mpu6050数据转换为控制wtservo16的指令数据包,并由串口发送;wtservo16将接收到的串行通信指令转换为控制sg90-9g舵机及sky walker-60a的pwm控制信号;sky walker-60a根据pwm波控制x2216-kv2400的转速。对执行端的要求是快速响应,使旋翼产生的推力可以实时抵消机器人的重力,避免机器人因重力抵消不足而发生掉落。
13.(3)本实用新型中的遥控器中,矩阵键盘及液晶显示屏作为人机交互终端,由键盘向系统发出指令,显示屏显示机器人当前工作状态;由nrf24l01将指令发送到执行端。控制指令包括无刷电机的加减速、加速至满速、减速至零;控制机器人前进、后退、左右转向;地面与壁面运行模式切换。显示内容包括电机当前转速、机器人的转向状态及运行模式等。对遥控端的要求是准确发送指令并显示状态信息。
附图说明
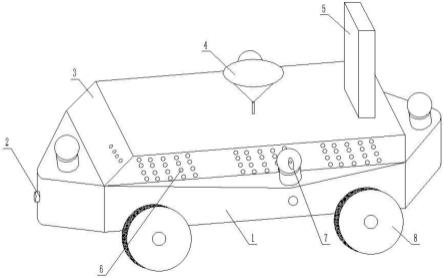
14.图1为本实用新型中机器人的俯视图;
15.图2为本实用新型中机器人的仰视图;
16.图3为本实用新型中机器人的控制系统示意图。
具体实施方式
17.下面结合附图对本实用新型进行具体的说明。
18.如附图1至附图2所示,一种能够多维空间作业的新型机器人,包括车架结构与控制电路;所述车架结构包括车架、四个车轮1以及两个推进涵道2;以车架延伸的方向为x轴方向, y轴方向与车架延伸的方向垂直;所述车架沿x轴方向的前后端均设置为中空框架,中空框架上端均安装推进涵道;所述推进涵道包括环形框架3及位于环形框架中间的涵道风扇4;所述环形框架可旋转的连接至车架的上表面,其中空的部分与车架的中空部分对应;所述环形框架的旋转轴5的方向为y轴方向;所述涵道风扇可旋转的安装于框架中间,所述涵道风扇的旋转轴6方向为x轴方向;所述车架下表面车架与车轮之间设置车架减震装置;
19.如附图3所示,所述控制电路包括主控芯片、控制前面两个车轮运动的两个对应的y轴舵机及其控制电路、控制每个环形框架旋转轴转动的对应的y舵机7及其控制电路、控制每个涵道风扇旋转轴转动的对应的x舵机8及其控制电路、姿态传感器、激光测距传感器以及无线通讯模块;所述轴舵机及其控制电路、无刷电机及其控制电路、x轴舵机及其控制电路、姿态传感器、激光测距传感器以及无线通讯模块均与主控芯片相连;
20.还包括遥控器;所述遥控器包括单片机stc89c52rc、4
×
4矩阵键盘、液晶显示屏lcd1602以及无线收发器芯片nrf24l01;所述4
×
4矩阵键盘输入指令至单片机stc89c52rc;单片机stc89c52rc通过与之相连的无线收发器芯片nrf24l01将指令传输至控制电路;显示屏显示机器人当前工作状态。
21.进一步地,所述控制电路的具体型号为:主控芯片的型号为stc89c52rc、无线通讯模块为nrf24l01、姿态传感器为jy61-mpu6050、舵机均为sg90-9g、舵机控制电路的电路板为wtservo16、无刷电机为x2216-kv2400、无刷电机控制电路的电路板为sky walker-60a。
22.具体实施例:
23.本机器人平台通过遥控器发送指令至机器人的执行端,机器人的控制装置根据指令内容,调节其中的舵机、电机的转速与方向,控制推进涵道改变风道的流向,即旋翼高速旋转产生的推力方向可以改变,实现机器人的地面行走、壁面吸附及动力驱动,因此可用于全地形作业、尤其可实现直角壁面之间的快速过渡(从地面直接运动到竖直壁面),改善现有机器人难以同时满足多维空间运动的弊端,提升现有机器人运动效率。以该机器人为平台,可广泛应用于复杂环境条件下的搜救、监视和壁面作业等工作领域。
24.本机器人的控制系统由两部分组成:遥控端及执行端。
25.遥控端由stc89c52rc、4
×
4矩阵键盘、lcd1602(hd44780)液晶显示屏及nrf24l01组成。矩阵键盘及液晶显示屏作为人机交互终端,由键盘向系统发出指令,显示屏显示机器人当前工作状态;由nrf24l01将指令发送到执行端。控制指令包括无刷电机的加减速、加速至满速、减速至零;控制机器人前进、后退、左右转向;地面与壁面运行模式切换。显示内容包括电机当前转速、机器人的转向状态及运行模式等。对遥控端的要求是准确发送指令并显示状态信息。
26.执行端由stc89c52rc、nrf24l01、jy61-mpu6050、wtservo16控制板、sg90-9g舵机、sky walker-60a、x2216-kv2400等组成。nrf24l01负责接收控制指令;stc89c52rc将控制指令及jy61-mpu6050数据转换为控制wtservo16的指令数据包,并由串口发送;wtservo16将接收到的串行通信指令转换为控制sg90-9g舵机及sky walker-60a的pwm控制信号;sky walker-60a根据pwm波控制x2216-kv2400的转速。对执行端的要求是快速响应,使旋翼产生的推力可以实时抵消机器人的重力,避免机器人因重力抵消不足而发生掉落。
27.虽然本实用新型已以较佳实施例公开如上,但它们并不是用来限定本实用新型的,任何熟习此技艺者,在不脱离本实用新型之精神和范围内,自当可作各种变化或润饰,因此本实用新型的保护范围应当以本技术的权利要求保护范围所界定的为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。