1.本实用新型涉及多光光电吊舱技术领域,具体为一种高集成度小型三光吊舱。
背景技术:
2.光电吊舱主要应用于移动平台,典型应用是无人机及无人车中,其需要在移动过程中观测远处的目标;当采用光学变焦放大时,视场角会很小,此时运载平台细微的抖动,都会导致视频画面来回跳动,无法看清;因此三轴增稳技术可使得运动中画面仍是稳定的,达到有效观测的目的。
3.在各种复杂及多变的应用中,如夜晚,复杂背景条件下,可见光画面无法有效分辨目标时,热红外成像就成为一种有效的补充,对温差目标进行成像,如电力巡线中,用热成像发现异常热源,用可见光变焦看清细节。找出异常原因,清除隐患。
4.当采用机器视觉时,我们很难直观的判断视场中目标物体的远近,而激光测距就能给出精准的距离数据,从而协助实现目标定位之类的功能。
5.多光三轴增稳吊舱,能让无人机类设备的作用大大增加,操作简化,在各种复杂场景中都能发挥出实时监控观测的作用。
技术实现要素:
6.本实用新型的目的在于提供了一种高集成度小型三光吊舱,解决了背景技术中的问题。
7.为实现上述目的,本实用新型提供如下技术方案:一种高集成度小型三光吊舱,包括对外接口控制盒、yaw轴电机、pitch轴电机、可见光变焦控制电路板、激光测距仪、变焦可见光镜头、红外热成像、isp编码处理器板、roll电机,所述yaw轴电机安装在对外接口控制盒底端,所述激光测距仪与变焦可见光镜头、红外热成像外部分别设置有上舱体与下舱体,所述pitch轴电机安装在吊舱结构的侧面,所述变焦可见光镜头安装在红外热成像顶端,所述激光测距仪安装在变焦可见光镜头与红外热成像一侧。
8.优选的,所述isp编码处理器板安装在下舱体内壁上,所述roll电机安装在激光测距仪与变焦可见光镜头、红外热成像外部,且所述roll电机与yaw轴电机连接,主isp处理器用于视频图像,网络协议的处理,而多个mcu分别用于各功能模块的独立控制。相互间用uart串口进行命令交互。
9.优选的,所述对外接口控制盒内置yaw电机控制电路,对外接口协议转换电路,所述yaw轴电机采用连续360度旋转电机,内置滑环,水平转动。
10.优选的,所述pitch轴电机采用限位电机,控制俯仰角度,所述可见光变焦控制电路板是对变焦可见光镜头的控制,与isp处理器间的命令交互,与接口控制mcu间的通讯。
11.优选的,所述激光测距仪是单发单收激光模块,高精度测量直线距离,所述变焦可见光镜头采用光学变焦,实现高清视频。
12.优选的,所述红外热成像对热温度进行显示,采用多种伪彩模式并测温,所述roll
电机采用双限位电机,用于横滚方向增稳。
13.优选的,所述isp编码处理器板对可见光的af值计算、双路视频的画中画合成、多码流的输出、本地双码流的录像、网络控制协议的收发,主isp编码处理器,对cmos传感器进行设置,并进行3a处理,usb口接收热成像的640*512视频流及温度信息,将两路视频流,内部h264硬编码,并合成后rtsp码流输出,压缩后视频进行本地tf卡存储,isp处理器接收串口的命令,也同步接收来自于网络udp命令,在内部进行处理,进行录像、拍照、文件读取、时间设置、视频参数设置、画中画工作模式设置等,将其它命令进行透传处理,实时将每帧视频的af计算值通过uart端口送往马达控制mcu处理器,并在主isp处理器上做相应的云平台推流协议;
14.马达控制mcu主要实现变焦镜头的控制,可见光镜头采用一体机机芯镜头,zoom与focus均采用螺杆步进马达来控制。根据外部的命令,来控制zoom马达实现视频图像的放大缩小功能,根据内部的对焦曲线,将focus同步调整至合适位置,并通过uart实时读取isp处理器的计算af值;做为图像的对焦清晰度,来控制focus马达做相应的运动.通过高速的马达运动及实时图像处理,根据对焦算法实现focus马达最终停留在图像最清晰的位置;完成自动对焦功能;当激光测距功能使能时,mcu会定时读取激光测距的测量值,分别送往接口mcu和isp处理器,送往地面站进行显示,马达控制mcu接收串口的命令,分别来自于接口mcu和isp网络udp命令;在内部进行处理,进行变焦,手动聚焦,ircut切换,马达位置输出等操作,将其它命令进行透传处理;
15.通讯接口mcu主要实现外部接口命令的转发,吊舱参数的保存。即将外部接收到的命令,如果是云台控制相关的命令,转发至云台控制mcu,相关控制相关的命令,转发给马达控制mcu;其内部对云台漂移根据磁编码做相应的去漂移处理;
16.云台控制mcu主要执行云台增稳的功能,其控制三个马达,分别控制yaw轴,roll轴,pitch轴的稳定;实时高速读取imu芯片的三轴加速度及三轴陀螺仪参数,来感知球体的姿态及运动趋势,结合三轴磁编码来检测三轴电机的位置;用pid算法进行位置快速纠正,实现云台的增稳;云台控制mcu会根据外部的指令在增稳的同时来控制相机的指向;实现航向及俯仰的控制;同时也会实时输出三轴电机的实际位置;用于吊舱结合激光测距来实现目标位置的解算。
17.本实用新型提供了一种高集成度小型三光吊舱。该高集成度小型三光吊舱具备以下有益效果:
18.实现了小型,紧凑性的三光吊舱设计,使得小型无人机能够带动三光相机,并实现多种功能的融合。在实用中使无人机发挥更大的作用。降低了产品的成本,并使得三光应用的场合大大增加,创造更多的社会效益。
附图说明
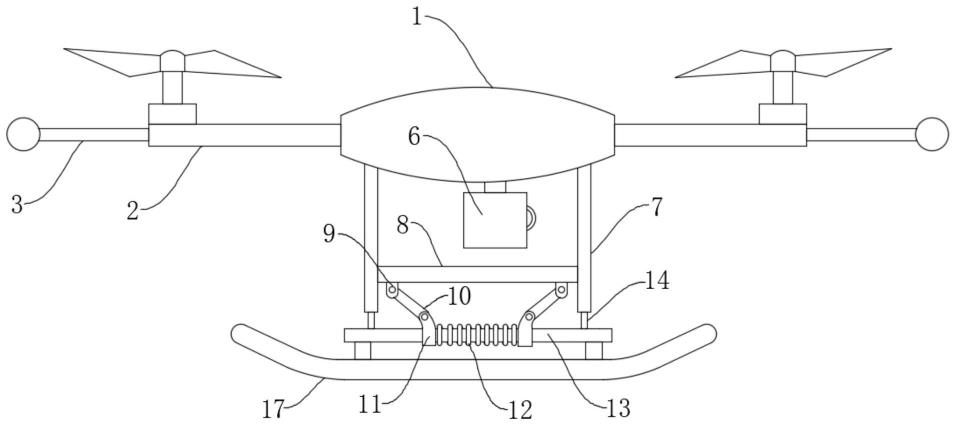
19.图1为本实用新型三光吊舱结构布局图;
20.图2为本实用新型三光设备相互间信号控制框图;
21.图3为本实用新型多处理器间的通信控制路径。
22.图中:1.对外接口控制盒 2.yaw轴电机 3.pitch轴电机 4.可见光变焦控制电路板 5.激光测距 6.变焦可见光镜头 7.红外热成像 8.isp编码处理器板 9.roll轴电机。
具体实施方式
23.如图1-3所示,本实用新型提供一种技术方案:一种高集成度小型三光吊舱,包括对外接口控制盒1、yaw轴电机2、pitch轴电机3、可见光变焦控制电路板4、激光测距仪5、变焦可见光镜头6、红外热成像7、isp编码处理器板8、roll电机9,yaw轴电机2安装在对外接口控制盒1底端,激光测距仪5与变焦可见光镜头6、红外热成像7外部分别设置有上舱体与下舱体,pitch轴电机3安装在吊舱结构的侧面,变焦可见光镜头6安装在红外热成像7顶端,激光测距仪5安装在变焦可见光镜头6与红外热成像7一侧,isp编码处理器板8安装在下舱体内壁上,roll电机9用与yaw轴电机(2)倾斜45度角放置,电机一侧与yaw轴电机(2)连接,另一侧与pitch轴电机(3)连接。主isp处理器用于视频图像,网络协议的处理。而多个mcu分别用于各功能模块的独立控制。相互间用uart串口进行命令交互,对外接口控制盒1内置yaw电机控制电路,对外接口协议转换电路,yaw轴电机2采用连续旋转电机,内置滑环,水平转动,pitch轴电机3采用限位电机,控制俯仰角度,可见光变焦控制电路板4是对变焦可见光镜头的控制,与isp处理器间的命令交互,与接口控制mcu间的通讯,激光测距仪5是单发单收激光模块,高精度测量直线距离,变焦可见光镜头6采用光学变焦,实现高清视频,红外热成像7对热温度进行显示,采用多种伪彩模式并测温,roll电机9采用限位电机,用于横滚方向增稳;
24.isp编码处理器板8对可见光的af值计算、双路视频的画中画合成、多码流的输出、本地双码流的录像、网络控制协议的收发,主isp编码处理器,对cmos传感器进行设置,并进行3a处理,usb口接收热成像的640*512视频流及温度信息,将两路视频流,内部h264硬编码,并合成后rtsp码流输出,压缩后视频进行本地tf卡存储,isp处理器接收串口的命令,也同步接收来自于网络udp命令,在内部进行处理,进行录像、拍照、文件读取、时间设置、视频参数设置、画中画工作模式设置等,将其它命令进行透传处理,实时将每帧视频的af计算值通过uart端口送往马达控制mcu处理器,并在主isp处理器上做相应的云平台推流协议;
25.马达控制mcu主要实现变焦镜头的控制,可见光镜头采用一体机机芯镜头,zoom与focus均采用螺杆步进马达来控制。根据外部的命令,来控制zoom马达实现视频图像的放大缩小功能,根据内部的对焦曲线,将focus同步调整至合适位置,并通过uart实时读取isp处理器的计算af值;做为图像的对焦清晰度,来控制focus马达做相应的运动.通过高速的马达运动及实时图像处理,根据对焦算法实现focus马达最终停留在图像最清晰的位置;完成自动对焦功能;当激光测距功能使能时,mcu会定时读取激光测距的测量值,分别送往接口mcu和isp处理器,送往地面站进行显示,马达控制mcu接收串口的命令,分别来自于接口mcu和isp网络udp命令;在内部进行处理,进行变焦,手动聚焦,ircut切换,马达位置输出等操作,将其它命令进行透传处理;
26.通讯接口mcu主要实现外部接口命令的转发,吊舱参数的保存。即将外部接收到的命令,如果是云台控制相关的命令,转发至云台控制mcu,相关控制相关的命令,转发给马达控制mcu;其内部对云台漂移根据磁编码做相应的去漂移处理;
27.云台控制mcu主要执行云台增稳的功能,其控制三个马达,分别控制yaw轴,roll轴,pitch轴的稳定;实时高速读取imu芯片的三轴加速度及三轴陀螺仪参数,来感知球体的姿态及运动趋势,结合三轴磁编码来检测三轴电机的位置;用pid算法进行位置快速纠正,实现云台的增稳;云台控制mcu会根据外部的指令在增稳的同时来控制相机的指向;实现航
向及俯仰的控制;同时也会实时输出三轴电机的实际位置;用于吊舱结合激光测距来实现目标位置的解算。
28.附图2为三光设备相互间信号控制框图,可见光通过cmos传感器输出视频mipi码流,热成像模块输出usb yuv2原始码流,均输入至isp处理器,由isp处理器对图像进行处理,进行视频拼接,h264编码后,从网口输出;对于可见光进行af值的计算,并将结果实时送往马达控制mcu;在mcu中对电机驱动芯片进行控制;马达控制mcu会实时通过uart端口读取激光测距模块的测量数据,输出给isp处理器及接口mcu,分别从接口mcu的串口输出或者从isp的网络,udp模式送往地面站;通讯接口mcu收发命令,当接收到云台控制时,将命令送往云台控制mcu处理器,并实时读取云台的姿态信息,反馈给isp处理器,由isp通过udp协议送往地面站。
29.附图3为多处理器间的通信控制路径图,吊舱有两种收发外部命令的端口,分别是isp处理器侧的网络udp命令,和接口mcu的uart串口命令。
30.当isp收到外部命令时,如果是自身的录像,相机参数命令,就直接处理,如果是其它命令,就转发给马达控制mcu。
31.当马达控制mcu收到命令,如果是镜头控制命令,就直接处理,如果是云台控制命令,就转发给接口mcu;如果是相机参数命令,就转发给isp处理器。
32.当接口mcu收到命令,如果本地参数,就直接读写;如果是相机相关的命令,就转发给马达控制mcu;如果是云台命令,就转发给云台控制mcu。
33.网络与串口间的命令可以用些模式进行命令的透传,以实现对吊舱外的其它设备进行命令控制,用于用户的命令扩展。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。