1.本发明涉及林业监管技术领域,尤其涉及一种林业有害生物飞机防治智能监管装置。
背景技术:
2.林业是指保护生态环境保持生态平衡,培育和保护森林以取得木材和其他林产品、利用林木的自然特性以发挥防护作用的生产部门,在林业树木种植过程中,会通过飞机智能监管方式进行有害生物的防治,主要是利用安装在无人机下方的摄像头,利用无人机的飞行带动摄像头对更多位置的林业树木进行监管;
3.但此种方式还存在以下不足之处:摄像头采用可拆装的固定的方式安装在无人机的下方,每次使用前以及使用后,都需要进行一次安装或拆卸操作,操作较为繁琐,且安装后的摄像头,在无人机起飞过程中,还可能与地面发生接触,影响摄像头表面的洁净度。
技术实现要素:
4.本发明的目的是为了解决背景技术中所提出的问题,而提出的一种林业有害生物飞机防治智能监管装置。
5.为了实现上述目的,本发明采用了如下技术方案:
6.一种林业有害生物飞机防治智能监管装置,包括无人机、摄像头,所述无人机上通过竖直升降结构安装有遮挡环;
7.所述无人机的下表面固定安装有伺服电机,所述伺服电机的驱动端固定安装有转动轴,所述转动轴与遮挡环之间安装有往复升降结构;
8.所述遮挡环内通过滑动组件安装有圆形安装盘,所述圆形安装盘的中间位置开设有与转动轴相配合的通孔,所述圆形安装盘与往复升降结构之间还配合安装有高度调整结构;
9.所述转动轴上通过连动组件安装有安装环,所述安装环通过单向轴承一安装有齿轮一,且齿轮一与圆形安装盘之间安装有同步升降组件;
10.所述圆形安装盘通过连接机构安装有齿环,所述圆形安装盘的下表面通过轴体转动安装有一个连接齿轮,且连接齿轮同时与齿轮一以及齿环相啮合;
11.所述摄像头通过杆体一固定安装在齿环上,所述齿环的下表面固定安装有杆体二,且杆体二的下端固定安装有配重块,且配重块、摄像头的中心以及转动轴的轴心三者处于同一直线上。
12.在上述的一种林业有害生物飞机防治智能监管装置中,所述竖直升降结构由固定盘、限位滑杆、限位挡块以及升降滑杆组成,所述无人机上固定安装有多个固定盘,每个所述固定盘的下表面均固定安装有一个限位滑杆,每个所述限位滑杆的下端均固定安装有一个限位挡块,所述遮挡环的外壁固定安装有多个升降滑杆,且升降滑杆滑动安装在相应的限位滑杆上。
13.在上述的一种林业有害生物飞机防治智能监管装置中,所述滑动组件由条形滑槽一、条形滑块一组成,所述遮挡环的内壁上开设有多个条形滑槽一,每个所述条形滑槽一上均滑动安装有一个条形滑块一,且条形滑块一的一端与圆形安装盘固定连接。
14.在上述的一种林业有害生物飞机防治智能监管装置中,所述往复升降结构由连接杆、磁性圆盘一、磁性圆盘二组成,所述转动轴上通过单向轴承二安装有圆盘,所述圆盘上固定安装有多个连接杆,每个所述连接杆的一端均固定安装有一个磁性圆盘一,且相邻两磁性圆盘一下表面的磁性相反,所述遮挡环上固定安装有多个与磁性圆盘一相配合的磁性圆盘二,且相邻两磁性圆盘二上表面的磁性相反。
15.在上述的一种林业有害生物飞机防治智能监管装置中,所述高度调整结构由磁性块一以及磁性块二组成,每个所述连接杆上均固定安装有一个磁性块一,且相邻两磁性块一下表面的磁性相反,所述圆形安装盘的上表面固定安装有多个与磁性块一相配合的磁性块二,且相邻两磁性块二上表面的磁性相反。
16.在上述的一种林业有害生物飞机防治智能监管装置中,所述连动组件由条形滑槽二、条形滑块二组成,所述转动轴上开设有多个条形滑槽二,每个所述条形滑槽二上均滑动安装有一个条形滑块二,且条形滑块二的一端与安装环的内壁固定连接。
17.在上述的一种林业有害生物飞机防治智能监管装置中,所述同步升降组件由环形阶梯槽一、阶梯滑块一组成,所述圆形安装盘的下表面开设有环形阶梯槽一,所述齿轮一的上表面固定安装有多个与环形阶梯槽一相配合的阶梯滑块一。
18.在上述的一种林业有害生物飞机防治智能监管装置中,所述连接机构由环形阶梯槽二、阶梯滑块二组成,所述圆形安装盘的下表面开设有环形阶梯槽二,所述齿环的上表面固定安装有多个与环形阶梯槽二相配合的阶梯滑块二。
19.与现有的技术相比,本发明优点在于:
20.1:通过遮挡环与圆形安装盘的配合使用,使得摄像头在无需使用时可受到遮挡环对其提供的一定安全保护,同时在所需使用时,可快速将摄像头移动至遮挡环的下方进行使用。
21.2:通过单向轴承一与单向轴承二的配合使用,使得摄像头可在所需时在水平位置发生移动,从而便于更好的进行拍摄所需,同时通过配重块的设置,使得摄像头的设置并不会对无人机整体的重心产生较大的偏移,提高整体使用时的稳定性。
22.3:通过磁性圆盘一与磁性圆盘二以及磁性块一与磁性块二之间的配合使用,使得连接杆转动时可快速使得遮挡环上移、圆形安装盘下移,从而快速使得摄像头移动至遮挡环的下方进行使用。
附图说明
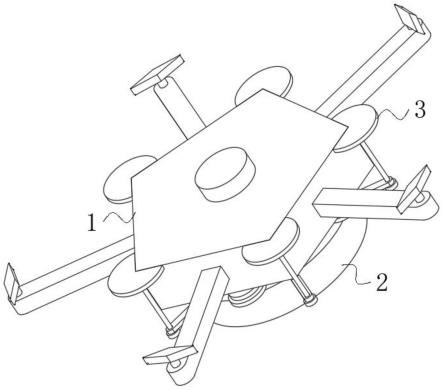
23.图1为本发明提出的一种林业有害生物飞机防治智能监管装置的结构示意图;
24.图2为本发明提出的一种林业有害生物飞机防治智能监管装置中无人机的结构示意图;
25.图3为图1中去除无人机并旋转一定角度后的结构示意图;
26.图4为图3中遮挡环部分旋转一定角度后的放大示意图;
27.图5为图3中圆形安装盘部分旋转一定角度后的结构示意图;
28.图6为图5中遮挡环部分旋转一定角度后的结构仰视图;
29.图7为为图6中a部分的结构放大示意图;
30.图8为图6中齿环部分旋转一定角度后的结构示意图;
31.图9为图6中圆形安装盘旋转一定角度后的示意图。
32.图中:1无人机、2遮挡环、3固定盘、4限位滑杆、5限位挡块、6升降滑杆、7伺服电机、8转动轴、9连接杆、10磁性圆盘一、11磁性圆盘二、12条形滑槽一、13条形滑块一、14圆形安装盘、15磁性块一、16通孔、17条形滑槽二、18条形滑块二、19安装环、20单向轴承一、21齿轮一、22环形阶梯槽一、23阶梯滑块一、24环形阶梯槽二、25阶梯滑块二、26齿环、27连接齿轮、28配重块、29摄像头。
具体实施方式
33.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
34.参照图1-4,一种林业有害生物飞机防治智能监管装置,包括无人机1、摄像头29,无人机1上通过竖直升降结构安装有遮挡环2;
35.无人机1的下表面固定安装有伺服电机7,伺服电机7的驱动端固定安装有转动轴8,转动轴8与遮挡环2之间安装有往复升降结构;
36.上述值得注意的有以下几点:
37.1、竖直升降结构由固定盘3、限位滑杆4、限位挡块5以及升降滑杆6组成,无人机1上固定安装有多个固定盘3,每个固定盘3的下表面均固定安装有一个限位滑杆4,每个限位滑杆4的下端均固定安装有一个限位挡块5,遮挡环2的外壁固定安装有多个升降滑杆6,且升降滑杆6滑动安装在相应的限位滑杆4上。
38.2、往复升降结构由连接杆9、磁性圆盘一10、磁性圆盘二11组成,转动轴8上通过单向轴承二安装有圆盘,圆盘上固定安装有多个连接杆9,每个连接杆9的一端均固定安装有一个磁性圆盘一10,且相邻两磁性圆盘一10下表面的磁性相反,遮挡环2上固定安装有多个与磁性圆盘一10相配合的磁性圆盘二11,且相邻两磁性圆盘二11上表面的磁性相反。
39.3、通过竖直升降机构与往复升降结构的配合使用,使得遮挡环2可在整体装置使用时控制遮挡环2上移,将摄像头29露出至其下方进行使用。
40.参照图1、图3-7,遮挡环2内通过滑动组件安装有圆形安装盘14,圆形安装盘14的中间位置开设有与转动轴8相配合的通孔16,圆形安装盘14与往复升降结构之间还配合安装有高度调整结构;
41.上述值得注意的有以下几点:
42.1、滑动组件由条形滑槽一12、条形滑块一13组成,遮挡环2的内壁上开设有多个条形滑槽一12,每个条形滑槽一12上均滑动安装有一个条形滑块一13,且条形滑块一13的一端与圆形安装盘14固定连接。
43.2、滑动组件的设置使得圆形安装盘14可在所需时沿条形滑槽一12的方向发生滑动,且在条形滑块一13与条形滑槽一12的配合下会使得圆形安装盘14与遮挡环2之间在能
发生一定幅度的竖直方向上的相对滑动的同时,二者不会彻底分离。
44.3、高度调整结构由磁性块一15以及磁性块二(图中未画出)组成,每个连接杆9上均固定安装有一个磁性块一15,且相邻两磁性块一15下表面的磁性相反,圆形安装盘14的上表面固定安装有多个与磁性块一15相配合的磁性块二,且相邻两磁性块二上表面的磁性相反。
45.参照图6-9,转动轴8上通过连动组件安装有安装环19,安装环19通过单向轴承一20安装有齿轮一21,且齿轮一21与圆形安装盘14之间安装有同步升降组件;
46.上述值得注意的有以下几点:
47.1、连动组件由条形滑槽二17、条形滑块二18组成,转动轴8上开设有多个条形滑槽二17,每个条形滑槽二17上均滑动安装有一个条形滑块二18,且条形滑块二18的一端与安装环19的内壁固定连接。
48.2、同步升降组件由环形阶梯槽一22、阶梯滑块一23组成,圆形安装盘14的下表面开设有环形阶梯槽一22,齿轮一21的上表面固定安装有多个与环形阶梯槽一22相配合的阶梯滑块一23。
49.3、同步升降组件的设置使得齿轮一21会随着圆形安装盘14在竖直方向上进行上下移动,但不影响齿轮一21相对圆形安装盘14在水平方向上的转动。
50.参照图6-9,圆形安装盘14通过连接机构安装有齿环26,圆形安装盘14的下表面通过轴体转动安装有一个连接齿轮27,且连接齿轮27同时与齿轮一21以及齿环26相啮合;
51.摄像头29通过杆体一固定安装在齿环26上,齿环26的下表面固定安装有杆体二,且杆体二的下端固定安装有配重块28,且配重块28、摄像头29的中心以及转动轴8的轴心三者处于同一直线上;
52.上述值得注意的有以下两点:
53.1、连接机构由环形阶梯槽二24、阶梯滑块二25组成,圆形安装盘14的下表面开设有环形阶梯槽二24,齿环26的上表面固定安装有多个与环形阶梯槽二24相配合的阶梯滑块二25。
54.2、连接机构的设置使得齿环26相对圆形安装盘14可发生水平方向上的相对转动,但齿环26会随着圆形安装盘14在竖直方向上同时进行移动。
55.进一步说明,上述固定连接,除非另有明确的规定和限定,否则应做广义理解,例如,可以是焊接,也可以是胶合,或者一体成型设置等本领域技术人员熟知的惯用手段。
56.本发明中,当使用该装置时,开启伺服电机7,伺服电机7工作通过转动轴8带动连接杆9、磁性圆盘一10转动(此时单向轴承二自锁,但单向轴承一20处于可转动状态,为便于理解,磁性圆盘一10的个数设置为4个,磁性圆盘一10转动90
°
,使其转动至下一相邻磁性圆盘一10上);此时磁性圆盘二11所受到的磁性由初始的相斥转换为相吸,然后在吸力作用下带动遮挡环2上移;
57.连接杆9转动的同时带动磁性块一15一并转动,此时磁性块一15与相应磁性块二之间的磁性由初始的相吸转换为相斥,从而也使得圆形安装盘14受到一个向下的作用力,从而带动摄像头29下移进行使用;
58.当需要调整摄像头29在水平出的位置时,可通过伺服电机7带动转动轴8反向转动,此时连接杆9在单向轴承二的作用下不会发生转动,但在单向轴承一20的作用下会带动
齿轮一21转动,齿轮一21转动通过连接齿轮27带动齿环26转动,齿环26转动即带动摄像头29在水平位置发生移动,从而便于更好的进行拍摄所需。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。