1.本发明涉及鱼类形态学领域,具体涉及一种三维鱼体姿态参数化建模方法。
背景技术:
2.随着我国鱼类养殖的蓬勃发展,对水下鱼类姿态的监测和研究在对提高水产养殖经济效益方面有重要的作用。在水下生态环境中最为常见且种类众多的水产品就是鱼类,在研究鱼类的饮食习性和运动规律等方面,除了体型的参数,鱼的姿态信息尤为重要,此外,对鱼的游泳姿态分析在水产养殖的精准投喂和捕捞等方面起到一定的作用。
3.对鱼类姿态的研究方式主要分为两种:第一种是靠传统的有经验的养殖人的观察,这种方法需要养殖人定时定点去养殖基地观察鱼的活动情况,并且需要有长期经验的人工来记录的一维数据并不能直接的展示出详直观且详细的鱼体运动姿态信息,第二种是通过图片或者视频的方法去获取的二维信息会有大量的冗余信息以及存在图像中鱼没有完整出现的问题,而且图像只能看到一个角度的鱼信息,若通过图像对鱼直接进行重构,需要大量的清晰鱼体姿态数据,这是不容易实现的。只依用一维或者二维信息不能构建出完整的鱼类生长过程中的姿态信息,并对其进行全面的分析。例如,分析鱼类姿态信息中的各鱼鳍摆动频率和摆动方式都会反应出鱼的生命体征的健康信息。
技术实现要素:
4.本发明人针对三维鱼体参数化建模方法研究时,发现可以通过对鱼类进行参数化建模从而生成不同姿态的真实的三维鱼体模型,在后续的工作中,再利用生成的不同三维鱼体模型,实现对鱼类运动规律的全面分析,实现对鱼的种类的精准识别和捕捉。
5.为了实现上述目的,本发明提供的技术方案如下:
6.步骤1:获取各个真实鱼体的姿态图像数据和三维鱼体姿态扫描数据;
7.步骤11:根据上述图像和扫描数据构建初始姿态的鱼体三维模板网格;
8.步骤12:根据真实的鱼体骨骼系统简化骨骼关节,定义简化后的鱼体骨架;
9.步骤13:根据定义的关节位置对鱼体模板网格进行分块;
10.步骤14:对三维扫描鱼体姿态数据做网格注册的预处理,将三维鱼体模板网格变形到各扫描的姿态数据,获得拓扑结构相同的数据集;
11.步骤2:提取模板网格与拓扑对齐后的数据之间的变形特征,生成的刚性变形空间和非刚性变形空间;
12.步骤3:训练模型,求解刚性变形空间和非刚性变形空间之间的线性关系;
13.步骤4:给定高层语义参数,输入到参数化模型中,给出对应的三维鱼体姿态模型。
14.本技术方法具有如下有益效果:目前基于真实数据的鱼体姿态参数化建模很少,本技术基于扫描鱼体姿态数据设计了一种三维鱼体姿态参数化建模方法,该方法能够根据输入的高层参数生成不同姿态的鱼体模型,能够实现三位鱼体姿态模型的构建,克服了人工提供一维数据的不直观以及人力成本大的缺点,以及二维图形中只能拍摄同一时刻有限
个视觉角度的缺点,解决了不能对鱼类姿态进行全面的分析的问题。此外,三维鱼体姿态数据在水产养殖还有很多其他应用,例如,在精准投喂时根据鱼的游泳姿态实现对鱼类饲料投放多少进行把控。
15.本技术的参数化鱼体姿态方法有如有益效果:
16.本技术方法基于真实鱼体数据进行建模,与专业建模师的动画建模不同,生成的网格模型更具有价值。该方法与专业建模师的建模相比更快,减少了专业建模师构建大量姿态的工作时间。
17.充分学习姿态相关的变形特征,能计算出符合真实鱼体姿态的变形。
附图说明
18.下面对本发明中所需要使用的附图进行介绍。
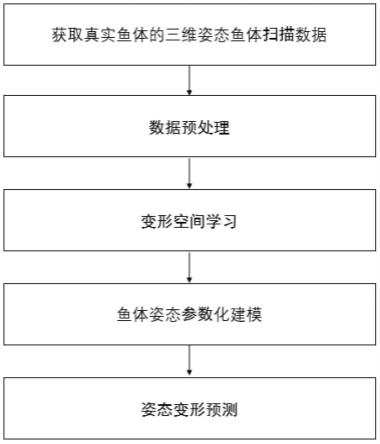
19.图1为基于三维鱼体姿态参数化建模方法技术路线;
20.图2是采集真实鱼体搭建的激光扫描仪扫描平台;
21.图3是由真实鱼体构建出的鱼体模板;
22.图4为本发明基于真实鱼体关节系统定义的鱼体骨架;
23.图5为以一个三角形为例,解释整个网格变形映射的过程;
24.图6为基于三维鱼体姿态参数化建模方法流程图。
具体实施方式
25.为了对本发明的技术方案更加清晰的说明,下面将基于实施例中的附图对本发明进行详细地描述此外,此处描述的实施例仅用以解释本发明,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
26.目前基于有经验的人工提供地文本数据和基于图像地二维数据,很难获取到完整的三维鱼体姿态信息,从而不能对鱼的生长发育进行全面的分析。当基于二维信息对水下养殖鱼类精准捕捉时,难以全面分析鱼体的身长和体型宽窄等信息,使得难以捕捉到目标鱼。因此,构建三维鱼类姿态数据集,并将三维鱼体姿态参数化建模对水产养殖精准化管理起着非常重要的作用。
27.常见的三维模型构建方法有以下两种:第一种是基于结构光或者激光雷达等技术对物体进行重建,但是对水水下环境来说结构光和激光会受到水的折射的影响,雷达在水下也会衰减。第二种是基于多目视觉的重建,即在水下多视角拍摄,基于此图像重建三维模型,但是同样会受到自然光在水下发生折射的影响,多目高清摄像机的成本较高,且难以控制同时捕捉某一时刻的多角度图像。
28.实施例一
29.如图1所示,本发明实施例提供一种基三维鱼体姿态参数化建模方法,包括下述步骤:
30.步骤1:获取样本数据,对数据进行预处理;
31.步骤2;提取模板网格与拓扑对齐后的数据之间的变形特征,生成的刚性变形空间和非刚性变形空间;
32.步骤3:训练模型,求解刚性变形空间和非刚性变形空间之间的线性关系;
33.步骤4:给定高层语义参数,输入到参数化模型中,给出对应的三维鱼体姿态模型。
34.在上述的步骤1中,本实例的方法具体包括如下步骤:
35.步骤11:搭建激光扫描平台,如图2所示。从扫描的鱼体姿态数据集中挑选尺寸合适的一条三维网格模型,并基于此,由专业模型设计师依据扫描数据实例,简化出相同尺寸和姿态的网格模型,并将简化后完整的网格模型定义为鱼体模板,与扫描数据相比鱼体模板有均匀的面片和较少的定点数量,鱼体模板参考图3;
36.步骤12:参考真实的鱼类骨骼系统和运动方式,简化鱼的骨骼,定义鱼的骨骼关节,简化后的鱼体骨架模型参考图4;
37.步骤13:在步骤12之后,基于简化后的鱼体骨骼数量和关节位置将鱼体模板对进行分块,这是为后面的参数化鱼体网格做准备,分块网格模型参考图5;
38.步骤14:先将采集的样本数据进行下采样处理,采集的原始点云数据顶点数量庞大,会对后面的操作造成影响。之后去除扫描数据的离散顶点,在采集过程中会扫描到场景中的旁边的物体,所以会有离散顶点的出现,这些离散顶点需要除掉。最后,将这些扫描数据实例与步骤11中定义的鱼体模板非刚性对齐,使其拓扑结构一致,拥有相同的顶点数和面片数;
39.步骤21:利用步骤14得到的相同拓扑的鱼体姿态数据集和步骤11的鱼体模板,计算实例数据与鱼体模板相同分块的之间的刚性和非刚性变形矩阵。首先计算对应分块的绝对旋转矩阵,由于存在非刚性变形,则计算近似的绝对旋转矩阵r={r1,r2,...,r
l
};
40.步骤22:将步骤21中计算的全局旋转矩阵转化成相对旋转矩阵,在这里本发明认为,一个关节,只与最近的两个关节存在非刚性变形的关系,所以与距离最近的两个关节计算相对旋转矩阵,假设当前关节点所属的分块的绝对旋转矩阵为r1,且与其最近的两个关节点所属的分块的绝对旋转矩阵为r2,r3,那么它们对应的相对旋转矩阵为
41.步骤23:本发明认为鱼体姿态网格发生了刚性和非刚性变形,发生网格变形经过非刚性和刚性变形两步。为了方便表示变形过程,图5将一个三角形作为一个实施例,三角形的两个边可以描述一个三角,可以看到对三角形进行非刚性变形和刚性变形可以得到最终变形后的三角形;
42.步骤24:在鱼体姿态实例已知的情况下,可以得到步骤22的旋转矩阵r={r1,r2,...,r
l
}。利用实例数据以及旋转矩阵r={r1,r2,...,r
l
}通过求解目标函数,得到一个估计的矩阵q={q1,q2,...,qf},其中目标函数公式具体表示如下:
[0043][0044]
其中,为实例数据的旋转矩阵,q为实例yi的非刚性变形矩阵,v
k,j
为鱼体模板上的边,为实例数据yi上对应的边,同时约束项保证了相邻的三角形非刚性变形矩阵的相似;
[0045]
步骤31:为了刚好的表示关节旋转,我们将旋转矩阵进行降为twist向量,之间的具体公式参考如下:
[0046][0047]
其中,m
i,j
为相对旋转矩阵中的元素,i,j为矩阵元素的行数和列数,m为相对旋转矩阵;
[0048]
步骤32:上述步骤31,可以得到所有实例数据与鱼体模板之间的刚性变形矩阵计算出来的twist向量,利用线性回归计算刚性变形矩阵与非刚性变形矩阵之间的线性关系,求解两者之间的系数。在本发明中认为影响某个分块非刚性变形只与关节点距离最近的两个关节点的旋转存在关系,所以本发明将两个twist向量和一个偏量进行合并,得到一个7*1的向量;
[0049]
步骤33:基于此,计算由实例数据估计出来的非刚性变形矩阵和7*1向量之间的线性系数,具体公式参见如下:
[0050][0051]
步骤41:输入与步骤12定义的关节点对应的高层语义鱼体姿态参数,将对应的姿态参数对关节点所在的鱼体分块网格进行旋转,得到旋转后刚性变形的鱼体姿态模型,此时的鱼体没有非刚性变形的变化;
[0052]
步骤42:将步骤41得到的刚性鱼体网格模型与鱼体模板相对应的分块做计算出近似的旋转矩阵r,再利用步骤32得到的线性系数与r估算出一组非刚性变形矩阵q,如果只对离散的三角形变形,那么不会生成一个完整的鱼体网格,所以利用三角形边的信息相互制约,使其计算最优值能够生成一个完整的目标鱼体姿态网格;
[0053][0054]
如图6所示,展示的是三维鱼体参数化建模方法的流程图。
[0055]
本发明公开的一种三维鱼体姿态参数化方法,能够通过输入少量的高层语义参数对与鱼体网格模型进行变形,得到不同姿态的鱼体网格数据,为三维鱼体姿态网格数据集的构建提供了有效的方法。
[0056]
以上所述仅为本发明的实施例,并不用来限制本发明,凡是在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。