技术特征:
1.一种基三维鱼体姿态参数化建模方法,其特征在于,包括下述步骤:步骤1:获取样本数据,对数据进行预处理;步骤2:提取模板网格与拓扑对齐后的数据之间的变形特征,生成的刚性变形空间和非刚性变形空间;步骤3:训练模型,求解刚性变形空间和非刚性变形空间之间的线性关系;步骤4:给定高层语义参数,输入到参数化模型中,给出对应的三维鱼体姿态模型。2.根据权利要求1所述的一种基三维鱼体姿态参数化建模方法,其特征在于,所述步骤1具体包括:步骤11:搭建激光扫描平台,从扫描的鱼体姿态数据集中挑选尺寸合适的一条三维网格模型,并基于此,由专业模型设计师依据扫描数据实例,简化出相同尺寸和姿态的网格模型,并将简化后完整的网格模型定义为鱼体模板,与扫描数据相比鱼体模板有均匀的面片和较少的顶点数量;步骤12:参考真实的鱼类骨骼系统和运动方式,简化鱼的骨骼,定义鱼的骨骼关节;步骤13:在步骤12之后,基于简化后的鱼体骨骼数量和关节位置将鱼体模板对进行分块,这是为后面的参数化鱼体网格做准备;步骤14:先将采集的样本数据进行下采样处理,采集的原始点云数据顶点数量庞大,会对后面的操作造成影响;之后去除扫描数据的离散顶点,在采集过程中会扫描到场景中的旁边的物体,所以会有离散顶点的出现,这些离散顶点需要除掉;最后,将这些扫描数据实例与步骤11中定义的鱼体模板非刚性对齐,使其拓扑结构一致,拥有相同的顶点数和面片数。3.根据权利要求1所述的一种基三维鱼体姿态参数化建模方法,其特征在于,所述步骤2具体包括:步骤21:利用步骤14得到的相同拓扑的鱼体姿态数据集和步骤11的鱼体模板,计算实例数据与鱼体模板相同分块的之间的刚性和非刚性变形矩阵。首先计算对应分块的绝对旋转矩阵,由于存在非刚性变形,则计算近似的绝对旋转矩阵r={r1,r2,...,r
l
};步骤22:将步骤21中计算的全局旋转矩阵转化成相对旋转矩阵,在这里本发明认为,一个关节,只与最近的两个关节存在非刚性变形的关系,所以与距离最近的两个关节计算相对旋转矩阵,假设当前关节点所属的分块的绝对旋转矩阵为r1,且与其最近的两个关节点所属的分块的绝对旋转矩阵为r2,r3,那么它们对应的相对旋转矩阵为步骤23:本发明认为鱼体姿态网格发生了刚性和非刚性变形,发生网格变形经过非刚性和刚性变形两步;为了方便表示变形过程,三角形的两个边可以描述一个三角,可以看到对三角形进行非刚性变形和刚性变形可以得到最终变形后的三角形;步骤24:在鱼体姿态实例已知的情况下,可以得到步骤22的旋转矩阵r={r1,r2,...,r
l
};利用实例数据以及旋转矩阵r={r1,r2,...,r
l
}通过求解目标函数,得到一个估计的矩阵q={q1,q2,...,q
f
},其中目标函数公式具体表示如下:
其中,为实例数据的旋转矩阵,q为实例y
i
的非刚性变形矩阵,v
k,j
为鱼体模板上的边,为实例数据y
i
上对应的边,同时约束项保证了相邻的三角形非刚性变形矩阵的相似。4.根据权利要求1所述的一种基三维鱼体姿态参数化建模方法,其特征在于,所述步骤3具体包括:步骤31:为了刚好的表示关节旋转,我们将旋转矩阵进行降为twist向量,之间的具体公式参考如下:公式参考如下:其中,m
i,j
为相对旋转矩阵中的元素,i,j为矩阵元素的行数和列数,m为相对旋转矩阵;步骤32:上述步骤31,可以得到所有实例数据与鱼体模板之间的刚性变形矩阵计算出来的twist向量,利用线性回归计算刚性变形矩阵与非刚性变形矩阵之间的线性关系,求解两者之间的系数;在本发明中认为影响某个分块非刚性变形只与关节点距离最近的两个关节点的旋转存在关系,所以本发明将两个twist向量和一个偏量进行合并,得到一个7*1的向量;步骤33:基于此,计算由实例数据估计出来的非刚性变形矩阵和7*1向量之间的线性系数,具体公式参见如下:5.根据权利要求1所述的一种基三维鱼体姿态参数化建模方法,其特征在于,所述步骤4具体包括:步骤41:输入与步骤12定义的关节点对应的高层语义鱼体姿态参数,将对应的姿态参数对关节点所在的鱼体分块网格进行旋转,得到旋转后刚性变形的鱼体姿态模型,此时的鱼体没有非刚性变形的变化;步骤42:将步骤41得到的刚性鱼体网格模型与鱼体模板相对应的分块做计算出近似的旋转矩阵r,再利用步骤32得到的线性系数与r估算出一组非刚性变形矩阵q,如果只对离散的三角形变形,那么不会生成一个完整的鱼体网格,所以利用三角形边的信息相互制约,使其计算最优值能够生成一个完整的目标鱼体姿态网格;其中,y
j,k
表示待求解鱼体姿态网格中p
k
的第j个顶点,式(4)采用最小二乘法来求解。
技术总结
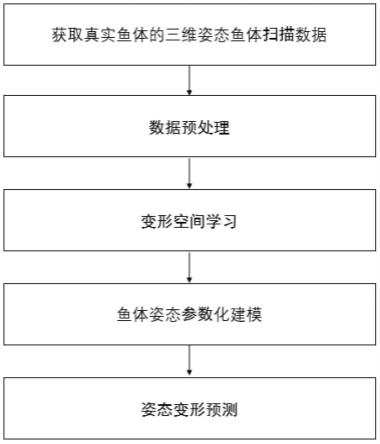
本发明公开了一种三维鱼体姿态建模方法,所述方法,包括:步骤1:获取真实三维鱼体姿态数据;步骤2:基于真实鱼体姿态数据定义鱼体模板和鱼体骨架模型,并将鱼体模板进行按照鱼体骨架关节划分成几个分块,同时对扫描实例做预处理;步骤3:使用鱼体姿态建模方法对鱼体姿态数据集进行参数化建模,训练实例数据,优化得到姿态变形所需要的参数;步骤4:输入高层语义参数,能够对鱼体姿态进行预测生成不同姿态的网格数据,为三维鱼体姿态数据集的构建提供了一种可行的方法。一种可行的方法。一种可行的方法。
技术研发人员:石敏 赵国亮 王素琴 朱登明
受保护的技术使用者:华北电力大学
技术研发日:2022.06.06
技术公布日:2022/8/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。