1.本发明涉及航空航天飞行控制技术领域,特别涉及一种外部扰动下的多航天器姿态跟踪预设性能控制方法及系统。
背景技术:
2.随着航天任务多样化,多航天器飞行研究得到迅速发展,姿态协同作为多航天器飞行基础技术,是当前多航天器飞行控制的重要一环。多航天器个体之间通过信息传递,不断调整自身姿态到达一致。在实际太空环境中,航天器会受到重力、稀薄大气阻力、太阳辐射等引起的未知干扰力矩的影响,极大程度上影响到航天器的控制,使得子航天器不能达到一致,对多航天器飞行任务造成不良影响。因此,研究受扰多航天器系统的控制方法具有重要的意义,亟需一种更加可靠的控制方法。
3.应该注意,上面对技术背景的介绍只是为了方便对本技术的技术方案进行清楚、完整的说明,并方便本领域技术人员的理解而阐述的。不能仅仅因为这些方案在本技术的背景技术部分进行了阐述而认为上述技术方案为本领域技术人员所公知。
技术实现要素:
4.本发明的目的是,针对上述背景技术中存在的不足,提供一种外部扰动下的多航天器姿态跟踪预设性能控制方案,以使多航天器系统在收到外部扰动的情况下正常快速地达到姿态一致,尽可能避免不良影响。
5.为了达到上述目的,本发明提供了一种外部扰动下的多航天器姿态跟踪预设性能控制方法,包括如下步骤:
6.s1,建立领导者航天器和多个跟随者航天器的动力学和运动学模型;
7.s2,在每个跟随者航天器中设置状态观测器,通过状态观测器来估计领导者航天器的姿态和角速度;
8.s3,建立状态观测器和跟随者航天器自身状态的误差数学模型;
9.s4,根据误差数学模型设置自适应预设性能控制器,通过自适应预设性能控制器,使误差始终保持在预设的性能约束函数之内。
10.进一步地,s1中领导者航天器基于姿态四元数的运动学和动力学方程如下:
[0011][0012]
ω0=wv
[0013][0014]
其中为领导者的姿态单位四元数,为领导者的角速度,x
×
为斜对称阵,具体定义如下:
[0015][0016]
跟随者航天器基于姿态四元数的运动学和动力学方程如下:
[0017][0018][0019][0020]
其中为跟随者的姿态单位四元数,为跟随者的角速度,为正定惯量矩阵,ui为控制力矩,t
di
为干扰力矩。
[0021]
进一步地,s2中第i个跟随者航天器通过以下状态观测器来估计领导者航天器的状态:
[0022][0023][0024][0025][0026]
其中为姿态四元数估计值,为角速度估计值,μ1,μ2》0为可调参数,η0(t)=q0(t),ξ0(t)=ω0(t),为第i个跟随者航天器邻居的集合。
[0027]
进一步地,s3中状态观测器与跟随者航天器之间的误差如下:
[0028][0029][0030][0031]
其中为姿态误差,为角速度误差,ki》0为可调参数,式中
[0032]
在第i个跟随者航天器中建立的误差运动学和误差动力学方程如下:
[0033]
[0054]
其中,r
i1
、r
i2
、ni>0都是可调参数,pi(0)已知。
[0055]
本发明还提供了一种外部扰动下的多航天器姿态跟踪预设性能控制系统,包括领导者航天器、跟随者航天器、状态观测器以及自适应预设性能控制器,所述状态观测器位于所述跟随者航天器上,用于估计领导者航天器的姿态和角速度,所述自适应预设性能控制器依据所述状态观测器和所述跟随者航天器自身状态的误差数学模型,控制所述跟随者航天器的姿态,使误差始终保持在预设的范围之内。
[0056]
本发明的上述方案有如下的有益效果:
[0057]
本发明提供的外部扰动下的多航天器姿态跟踪预设性能控制方案,在跟随者航天器中设计了状态观测器用来估计领导者航天器的状态信息,并在此基础上提出了一种自适应预设性能控制器,可使多航天器系统在收到外部扰动的情况下正常快速地达到姿态一致,能够实现真正的分布式控制,无需全局信息;自适应预设性能控制器可使稳态下的误差耦合项始终保持在规定的预设性能函数内;具有较强的鲁棒性,能够有效应对外部扰动,在此控制器作用下的姿态误差为最终一致有界;
[0058]
本发明的其它有益效果将在随后的具体实施方式部分予以详细说明。
附图说明
[0059]
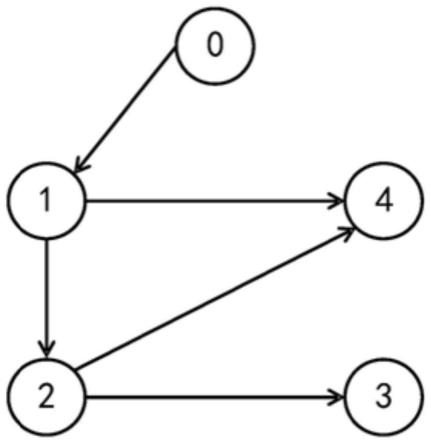
图1为本发明的仿真拓扑图;
[0060]
图2为跟随者航天器1误差耦合项曲线;
[0061]
图3为跟随者航天器2误差耦合项曲线;
[0062]
图4为跟随者航天器3误差耦合项曲线;
[0063]
图5为跟随者航天器4误差耦合项曲线。
具体实施方式
[0064]
为使本发明要解决的技术问题、技术方案和优点更加清楚,下面将结合附图及具体实施例进行详细描述。显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。此外,下面所描述的本发明不同实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互结合。
[0065]
在本发明的描述中,为了简单说明,该方法或规则作为一系列操作来描绘或描述,其目的既不是对实验操作进行穷举,也不是对实验操作的次序加以限制。例如,实验操作可以各种次序进行和/或同时进行,并包括其他再次没有描述的实验操作。此外,所述的步骤不都是在此描述的方法和算法所必备的。本领域技术人员可以认识和理解,这些方法和算法可通过状态图或项目表示为一系列不相关的状态。
[0066]
本发明涉及航空航天飞行控制技术领域,姿态协同作为多航天器飞行基础技术,是当前多航天器飞行控制的重要一环,多航天器个体之间通过信息传递,不断调整自身姿态到达一致。在实际太空环境中,航天器会受到重力、稀薄大气阻力、太阳辐射等引起的未知干扰力矩的影响,极大程度上影响到航天器的控制,使得子航天器不能达到一致,对多航天器飞行任务造成不良影响。研究受扰多航天器系统的控制方法具有重要的意义,基于此,
本发明的实施例1提供了一种外部扰动下的多航天器姿态跟踪预设性能控制方法,旨在解决上述问题。
[0067]
该方法具体包括如下步骤:
[0068]
s1:设置一组含有虚拟领导者航天器和多个跟随者航天器的多航天器系统作为研究对象,将航天器视为刚体,建立航天器动力学和运动学模型。
[0069]
其中,领导者航天器基于姿态四元数的运动学和动力学方程如下:
[0070][0071]
ω0=wv
[0072][0073]
其中为领导者的姿态单位四元数,为领导者的角速度,x
×
为斜对称阵,具体定义如下:
[0074][0075]
跟随者航天器基于姿态四元数的运动学和动力学方程如下:
[0076][0077][0078][0079]
其中为跟随者i的姿态单位四元数,为跟随者的角速度,为正定惯量矩阵,ui为控制力矩,依靠控制器对航天器姿态进行控制,t
di
为干扰力矩,例如重力、稀薄大气阻力、太阳辐射等引起的未知干扰力矩。
[0080]
s2:在每个跟随者航天器中设置状态观测器,通过状态观测器来估计领导者航天器的姿态和角速度。
[0081]
本实施例中具体如图1所示,以一个领导者航天器(编号为0)和4个跟随者航天器(编号1-4)为例进行说明。第i(i=1-4)个跟随者航天器中有以下状态观测器来估计领导者航天器的状态:
[0082][0083]
[0084][0085][0086]
其中为姿态四元数估计值,为角速度估计值,μ1,μ2》0为可调参数,η0(t)=q0(t),ξ0(t)=ω0(t),为第i个跟随者航天器邻居的集合。
[0087]
具体地,跟随者航天器1能够直接接收领导者航天器的姿态信息,因此自身状态观测器中η0(t)=q0(t),ξ0(t)=ω0(t),并根据此信息和以上动态方程计算自身状态观测器信息η1(t)和ξ1(t),同时向跟随者航天器2和跟随者航天器4发送自身状态观测器信息η1(t)和ξ1(t)。跟随者航天器2能够接收跟随者航天器1的观测器信息η1(t)和ξ1(t),用于计算自身状态观测器信息η2(t)和ξ2(t)并向跟随者航天器3和跟随者航天器4发送;同理,跟随者航天器3能够接收跟随者航天器2的观测器信息η2(t)和ξ2(t),用于计算自身状态观测器信息η3(t)和ξ3(t);同理,跟随者航天器4能够接收跟随者航天器1和跟随者航天器2的观测器信息η1(t)、η2(t)、ξ1(t)和ξ2(t),用于计算自身状态观测器信息η4(t)和ξ4(t)。
[0088]
s3:在第i个跟随者航天器中建立状态观测器和跟随者航天器自身状态的误差数学模型。
[0089]
其中,状态观测器与跟随者航天器之间的误差如下:
[0090][0091][0092][0093]
其中为姿态误差,为角速度误差,ki>0为可调参数,式中
[0094]
在第i个跟随者航天器中根据以上定义的误差建立的误差运动学和误差动力学方程如下:
[0095][0096][0097][0098]
其中
[0099][0100][0101][0102][0103]
s4:根据误差数学模型设置自适应预设性能控制器,通过自适应预设性能控制器,可以使此误差始终保持在预设的性能约束函数之内。
[0104]
具体地,预设性能函数为:
[0105]-b
iy
ρ
iy
<z
iy
<ρ
iy
,ifz
iy
(0)>0
[0106]-ρ
iy
<z
iy
<b
iy
ρ
iy
,ifz
iy
(0)<0,y=1,2,3
[0107]
ρ
iy
=(ρ
iy
0-ρ
iy∞
)e-ft
ρ
iy∞
[0108]
其中b
iy
,f,ρ
iy0
,ρ
iy∞
均为可调参数;f>0,ρ
iy0
>ρ
iy∞
>0。
[0109]
设置归一化误差s
iy
=z
iy
/ρ
iy
,经如下转换函数t
iy
得转换误差x
iy
:
[0110][0111]
因此设置的自适应预设性能控制器如下:
[0112]
ui(t)=-gix
i-(κ
i0
κi(t))zi[0113][0114]
其中gi,κ
i0
》0为可调参数,pi(t),φi为中间变量,由以下两个式子给出:
[0115][0116]
φi=1 ||ωi|| ||ωi||2[0117]
其中,r
i1
、r
i2
、ni》0都是可调参数,pi(0)已知,
[0118]
本实施例提供的方法是在以领导者航天器为根的有向生成树的有向通信拓扑结构下,多航天器系统姿态跟踪的预设性能控制问题。在跟随者航天器中设计了状态观测器用来估计领导者航天器的状态信息,并在此基础上提出了一种自适应预设性能控制器,可
使多航天器系统在收到外部扰动的情况下正常快速地达到姿态一致。
[0119]
以下通过具体算例对本实施例提供的方法进一步说明,利用matlab软件进行了仿真验证。其中,设定多航天器姿态跟踪预设性能控制系统的具体参数如下:
[0120]
选取领导者航天器初始状态q0(0)=col(sin1.5,0,0,cos1.5),v0(0)=col(1,0,1,0,1,0,1),矩阵w与s选取如下:
[0121][0122][0123]
选取四个跟随者航天器,姿态初始值和角速度初始值分别为:
[0124]
q1(0)=col(sin2,0,0,cos2),ω1(0)=col(0,1,0)
[0125]
q2(0)=col(0,sin0.6,0,cos0.6),ω2(0)=col(0,0,0.6)
[0126]
q3(0)=col(0,sin3,0,cos3),ω3(0)=col(0,0.2,0)
[0127]
q4(0)=col(0,0,sin3.5,cos3.5),ω4(0)=col(0.4,0,0)
[0128]
选取四个跟随者航天器惯性矩阵分别为:
[0129][0130]
跟随者航天器所受外部扰动如下:
[0131]
t
di
=(0.2 0.1‖ωi‖2)col(sin0.5t,sin0.5t,cos0.5t),i=1,2,3,4
[0132]
选取四个状态观测器中可调参数μ1=μ2=10,初始值为:
[0133]
η1(0)=col(0.3,0,0,0),ξ1(0)=col(0,0.2,0,0,0.2,0,0)
[0134]
η2(0)=col(0,0,1,0),ξ2(0)=col(0,0,0,0,0.5,0,0.5)
[0135]
η3(0)=col(0,1.2,0,0),ξ3(0)=col(1,0,0,0,0,0,1)
[0136]
η4(0)=col(0,0,0,0.8),ξ4(0)=col(0,0.8,0,0,0,0,0.8)
[0137]
选取预设性能函数中可调参数b
iy
=1.5,ρ
iy0
=4,ρ
iy∞
=0.1,f=-1,i=1,2,3,4,y=1,2,3。
[0138]
选取自适应预设性能控制器可调参数gi=20,κ
i0
=5,κi=2,r
i1
=0.3,r
i2
=0.01,pi(0)=0.1,ni=2。
[0139]
通过matlab进行仿真计算,仿真结果如图2-图5所示,可以看出多航天器系统在收到外部扰动的情况下能够快速地达到姿态一致,达到了本发明的技术目的。
[0140]
实施例2:
[0141]
本发明的实施例2提供了一种外部扰动下的多航天器姿态跟踪预设性能控制系
统,包括领导者航天器、跟随者航天器、状态观测器以及自适应预设性能控制器,所述状态观测器位于所述跟随者航天器上,用于估计领导者航天器的姿态和角速度,所述自适应预设性能控制器依据所述状态观测器和所述跟随者航天器自身状态的误差数学模型,控制所述跟随者航天器的姿态,使误差始终保持在预设的范围之内。
[0142]
该系统中的自适应预设性能控制器,可使多航天器系统在收到外部扰动的情况下正常快速地达到姿态一致,能够实现真正的分布式控制,无需全局信息;自适应预设性能控制器可使稳态下的误差耦合项始终保持在规定的预设性能函数内;具有较强的鲁棒性,能够有效应对外部扰动,在此控制器作用下的姿态误差为最终一致有界。
[0143]
以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明所述原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。