技术特征:
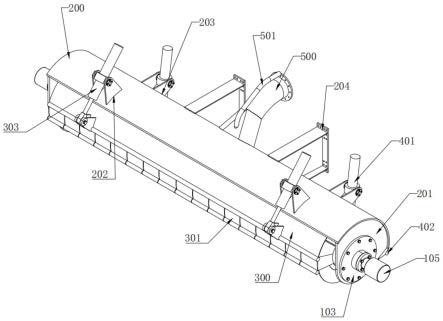
1.一种自适应的全封闭低扰动疏浚绞刀装置,其特征在于,包括绞刀结构、固定罩结构、活动罩结构和泥浆输送系统;所述绞刀结构包括螺旋式绞刀、转动轴系;所述螺旋式绞刀沿着转动轴系布置,所述螺旋式绞刀在转动轴系的转动下能够切割粉碎淤泥;所述固定罩结构、活动罩结构沿所述绞刀结构外侧布置,能够连接外部结构、保护绞刀结构、内部形成抽吸封闭腔体;所述活动罩结构布置于所述固定罩结构内侧并能够绕所述转动轴系旋转,能够改变所述活动罩结构遮盖所述螺旋式绞刀的面积;所述泥浆输送系统能够将所述绞刀结构在所述封闭腔体内切割、粉碎并输送泥浆。2.根据权利要求1所述的自适应的全封闭低扰动疏浚绞刀装置,其特征在于,所述螺旋式绞刀包括螺旋叶片(100)、螺旋筒体(101);所述螺旋叶片(100)固接于螺旋筒体(101)上,以螺旋筒体(101)中央为分界线,左右螺旋叶片(100)的螺旋方向相反,使得螺旋式绞刀朝一个固定方向转动时,能够将内部的泥沙由两侧向中央方向运输。3.根据权利要求2所述的自适应的全封闭低扰动疏浚绞刀装置,其特征在于,所述螺旋筒体(101)的两端直径大于中央直径使得在中央形成锥形过渡段进而增加容纳淤泥及其他污染物的体积。4.根据权利要求1所述的自适应的全封闭低扰动疏浚绞刀装置,其特征在于,所述固定罩结构包括绞刀固定罩(200)、绞刀端面罩(201);所述转动轴系包括绞刀轴承座(102)、绞刀底座(103)、梅花联轴器(104)、液压马达(105);所述绞刀固定罩(200)呈部分圆筒外壳状,遮盖绞刀结构;所述绞刀端面罩(201)固定于绞刀固定罩(200)侧面;所述绞刀底座(103)固定于绞刀端面罩(201)上并对转动轴系支撑限位;所述绞刀轴承座(102)固定于底座(103)上,绞刀轴承座(102)支撑所述绞刀结构两端,所述绞刀结构通过梅花联轴器(104)与液压马达(105)驱动连接。5.根据权利要求4所述的自适应的全封闭低扰动疏浚绞刀装置,其特征在于,所述固定罩结构还包括连接梁(204);所述连接梁(204)固接于所述绞刀固定罩(200)上,用于所述绞刀结构与外部结构的连接。6.根据权利要求1所述的自适应的全封闭低扰动疏浚绞刀装置,其特征在于,所述活动罩结构包括活动罩、活动插板、活动插板卡槽;所述活动罩的一端固接于所述固定罩结构内侧,另一端设置有若干活动插板,活动插板通过活动插板卡槽活动安装于活动罩,使得活动插板能够在活动插板卡槽内来回活动,实现活动罩外形的延伸。7.根据权利要求1所述的自适应的全封闭低扰动疏浚绞刀装置,其特征在于,所述泥浆输送系统包括布置于绞刀结构中央的淤泥管道(500)和高压水管道(501);所述淤泥管道(500)、高压水管道(501)均连通所述封闭腔体;疏浚作业过程中绞刀结构切割和粉碎的泥浆通过淤泥管道(500)向上输送,高压水通过高压水管道(501)输送至所述封闭腔体内部。8.根据权利要求1所述的自适应的全封闭低扰动疏浚绞刀装置,其特征在于,所述活动罩结构还包括活动罩油缸、活动油缸底座;
所述活动罩油缸的活塞杆一端固定在所述活动罩结构上,另一端绞接于活动油缸底座上,通过活动罩油缸的活塞杆的伸缩控制活动罩结构的转动角度。9.一种自适应的全封闭低扰动疏浚绞刀系统,其特征在于,包括权利要求1-8任一项所述的自适应的全封闭低扰动疏浚绞刀装置,还包括采集系统、控制中枢、执行系统;所述采集系统布置有安装于各个装置上的传感器,包括活动罩行程传感器、油缸压力传感器、桥架角度传感器、腔内压力传感器、水深水流传感器和马达监测传感器,用于收集装置实时运行数据和环境数据并提供给控制中枢;所述控制中枢根据采集系统收集到的各类环境和装置运行数据进行处理和分析,提供船上工作人员实时监控,并将自主运行和人工操作指令发送至执行系统执行;所述执行系统根据所述控制中枢的输出指令控制绞刀装置完成相应的操作。10.一种自适应的全封闭低扰动疏浚绞刀装置的控制方法,其特征在于,采用权利要求9所述的自适应的全封闭低扰动疏浚绞刀装置控制系统,还包括以下步骤:步骤100,根据疏浚作业要求和所在作业水域的水底地质条件,确定挖掘深度h、单次挖泥厚度d、压载量、前进方向前方的油缸工作压力参数,人工输入至控制中枢;步骤101,疏浚船抵达作业地点后,放下桥架使得绞刀装置抵达水域底部;绞刀装置稳定坐落于底部淤泥上之后,由工作人员启动装置绞刀液压马达,首先根据已确定的单次挖掘厚度d和挖掘深度h参数,在底部淤泥上进行初步挖掘,直到绞刀底部边缘到达挖掘深度和挖掘厚度要求,同时根据压载量要求,调整绞刀装置的压载,保证合适的挖掘对地比压,并完成疏浚作业的准备工作;步骤102,启动绞刀装置的控制系统,控制中枢将根据当前桥架结构和垂直方向的夹角θa和绞刀装置几何参数计算得到对应的活动罩行程角θb,然后输出相应的控制信号,执行系统使得活动罩行程角达到θb,此时活动罩边缘应与绞刀底部边缘齐平,保证后续绞刀装置前进过程中挖掘平面平整;步骤103,绞刀装置的固定罩和活动罩和底部淤泥之间形成了相对封闭的作业腔体,此时工作人员监测作业情况后,启动绞刀装置进行疏浚作业;步骤104,绞刀装置正常启动后,挖泥船前进的每一个时刻,控制中枢都会根据当前桥架结构和垂直方向的夹角θa计算得到对应的活动罩行程角θb,并给出相应的控制信号,使得后方挖掘区域始终保持平整;步骤105,完成疏浚工作后,首先关闭疏浚作业控制系统,工作人员操控桥架上升至回收位置,对绞刀装置进行检查、维护,而后前往下一个作业地点。
技术总结
本发明提供了一种自适应的全封闭低扰动疏浚绞刀装置、系统及控制方法,绞刀装置,包括绞刀结构、固定罩结构、活动罩结构和泥浆输送系统;绞刀结构包括螺旋式绞刀、转动轴系;螺旋式绞刀在转动轴系的转动下能够切割粉碎淤泥;固定罩结构、活动罩结构沿绞刀结构外侧布置,能够连接外部结构、保护绞刀结构、并形成内部抽吸封闭腔体;泥浆输送系统能够将切割和粉碎的泥浆向上输送。本发明能有效提高挖掘过程中泥浆浓度、提高清淤效率,避免悬浮物扩散和二次污染,解决了环保疏浚难题。同时针对上述装置提出了相应的控制系统和方法,在保证对地压力的同时,实现保护罩对泥面的自适应贴合,保证了清淤过程中挖掘区域的封闭性。证了清淤过程中挖掘区域的封闭性。证了清淤过程中挖掘区域的封闭性。
技术研发人员:赵永生 谢斯泓 赵远洋 何炎平 张戟 郑金龙 李晟 周丙浩 黄超 谷孝利
受保护的技术使用者:上海交通大学
技术研发日:2022.06.09
技术公布日:2022/8/12
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。