1.本发明涉及海洋垃圾处理技术领域,特别涉及一种海洋漂浮物处理装置。
背景技术:
2.海洋漂浮物漂浮在海面上,影响海洋景观,威胁航行安全,并对海洋生态系的健康产生影响,进而对海洋经济产生负面效应。
3.海洋漂浮物在处理的时候,大多数通过水下机器人对漂浮物进行收集,安全性高,现有的海洋漂浮物处理装置在使用的时候不方便对水下机器人收集的塑料垃圾进行回收处理,自动化程度低,不方便自动处理为水下机器人进行塑料垃圾收集与充电,不能完成机器人的收集与投放。
技术实现要素:
4.针对背景技术中提到的问题,本发明的目的是提供一种海洋漂浮物处理装置,以解决背景技术中提到的问题。
5.本发明的上述技术目的是通过以下技术方案得以实现的:
6.一种海洋漂浮物处理装置,包括船体,所述船体包括充电层和垃圾处理层,所述垃圾处理层位于所述充电层的上方,所述垃圾处理层的外侧表面上安装有多个等距分布的第一升降器,所述第一升降器的一侧设置有第一转位机械手,所述垃圾处理层上方设置有垃圾仓二次处理工站,所述第一转位机械手的一侧设置有收仓机械手,所述收仓机械手安装在所述垃圾处理层上;
7.所述充电层的内壁上安装有多个第二升降器,所述第二升降器的一侧安装有第二转位机械手,所述充电层中间设置有多个充电基站,所述充电基站的一侧安装有环形输送线,所述第二转位机械手位于所述环形输送线的一侧。
8.通过采用上述技术方案,通过垃圾处理层外侧安装的多个第一升降器方便将机器人从海面移动的船体上,通过第一转位机械手能够自动将机器人夹持移动到垃圾处理层的一侧,通过收仓机械手把机器人身上的垃圾仓取出放入中间位置的垃圾仓二次处理工站内进行倾倒,倾倒完成后将垃圾仓安装在机器人上,第一转位机械手连同机器人移动到第二升降器上,方便将机器人收集的垃圾直接自动处理,提高自动处理的性能,以及自动收集漂浮物的效率,通过第二升降器将机器人运输到充电层的底部,通过第二转位机械手方便将机器人放置到环形输送线上,环形运输线带动机器人进行移动到达指定位置后,通过充电基站方便对环形运输线带动机器人进行无线充电,提高充电的便捷性。
9.较佳的,所述第一升降器与所述第二升降器的结构相同,且均为丝杆升降器。
10.通过采用上述技术方案,丝杆升降器的可靠性高、故障率低、比较耐用以及方便维护,大大提高了第一升降器与所述第二升降器使用寿命。
11.较佳的,所述船体的外侧表面上设置有吃水位标识线,所述船体上安装有脱钩。
12.通过采用上述技术方案,通过吃水位标识线,能够船体工作吃水深度,避免船体在
工作的时候发生搁浅,通过脱钩方便船体的拖拽,提高移动的灵活性能。
13.较佳的,所述垃圾仓二次处理工站的下表面上连接有垃圾收集流道,所述垃圾收集流道安装在所述垃圾处理层的上表面上。
14.通过采用上述技术方案,通过垃圾仓二次处理工站上连接的垃圾收集流道,方便垃圾汇集流通到粉碎机中,进行粉碎处理。
15.较佳的,所述充电基站为无线充电基站。
16.通过采用上述技术方案,通过无线充电基站提高机器人充电的便捷性,减小充电插线的时间,提高工作的效率。
17.较佳的,所述充电层的表面上固定安装有绝缘板,所述第二转位机械手、所述环形输送线和所述充电基站均安装在所述绝缘板上。
18.通过采用上述技术方案,通过绝缘板提高充电层内侧地面的绝缘效果,避免船体第二转位机械手和环形输送线触电。
19.较佳的,其中一个所述第二升降器与其中一个所述第二转位机械手安装在所述充电层的出仓口一侧,其中一个所述第一转位机械手安装在充电层的出仓口的上方。
20.通过采用上述技术方案,通过充电层的出仓口一侧安装的第二升降器方便将充满电的机器人运输到充电层上,通过第二转位机械手将机器人移动到其中一个第一升降器中,将其送下水继续工作。
21.较佳的,所述船体上设置有垃圾处理模块,所述垃圾处理模块包括粉碎单元和裂化釜加工单元和精馏加工单元,所述粉碎单元用于对所述垃圾收集流道内的垃圾通过粉碎机设备进行粉碎,形成塑料小颗粒,所述裂化釜加工单元用于对粉碎后的塑料小颗粒通过裂化釜加热熔融塑料小颗粒至气体,所述精馏加工单元用于对气体通过精馏塔进出精馏处理筛分出需要的气体然后分别送至不同的气罐中。
22.通过采用上述技术方案,通过垃圾处理模块方便对塑料垃圾深加工,通过粉碎单元将垃圾进行粉碎,形成塑料小颗粒,通过裂化釜加工单元将塑料小颗粒加热形成塑料气体,通过精馏加工单元将塑料气体形成可燃气体分子。
23.较佳的,所述裂化釜加工单元中设置有搅拌子单元和温度控制子单元,所述搅拌子单元用于对所述裂化釜加热熔融塑料的小颗粒进行均匀搅拌,受热均匀,所述温度控制子单元用于控制所述裂化釜加热温度。
24.通过采用上述技术方案,通过搅拌子单元能够提高裂化釜加热搅拌的均匀性,受热更加均匀,有助于提高加工效率,通过温度控制子单元能够精准控制塑料小颗粒形成输料气体的温度。
25.较佳的,所述精馏加工单元通过设有的管道分别连接有汽油催化罐和柴油催化罐。
26.通过采用上述技术方案,汽油催化罐和柴油催化罐通过设有的管道与精馏加工单元连接时,气体送过来后和汽油催化罐和柴油催化罐中的催化剂进行反应,从而生成汽油或者柴油。
27.综上所述,本发明主要具有以下有益效果:
28.第一、该海洋漂浮物处理装置中,通过垃圾处理层外侧安装的多个第一升降器方便将机器人从海面移动的船体上,通过第一转位机械手能够自动将机器人夹持移动到垃圾
处理层的一侧,通过收仓机械手把机器人身上的垃圾仓取出放入中间位置的垃圾仓二次处理工站内进行倾倒,倾倒完成后将垃圾仓安装在机器人上,第一转位机械手连同机器人移动到第二升降器上,方便将机器人收集的垃圾直接自动处理,提高自动处理的性能,以及自动收集漂浮物的效率;
29.第二、该海洋漂浮物处理装置中,通过第二升降器将机器人运输到充电层的底部,通过第二转位机械手方便将机器人放置到环形输送线上,环形运输线带动机器人进行移动到达指定位置后,通过充电基站方便对环形运输线带动机器人进行无线充电,提高充电的便捷性。
附图说明
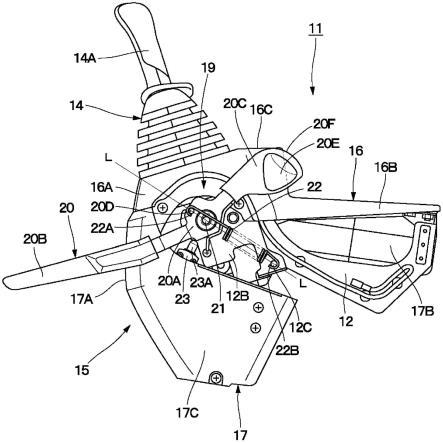
30.图1是本发明的结构示意图;
31.图2是本发明的垃圾处理层结构示意图;
32.图3本发明的充电层结构示意图;
33.图4是本发明的第一升降器结构示意图;
34.图5是本发明的垃圾仓二次处理工站结构示意图;
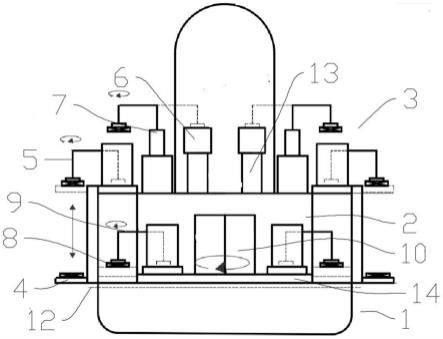
35.图6是本发明的总体布局图;
36.图7是外部升降装置三维结构图;
37.图8是内部升降装置三维结构图。
38.图9是机械手结构示意图;
39.图10是夹具结构示意图;
40.图11是转位机械手结构示意图;
41.图12是夹取部分结构示意图;
42.图13是输送线工站结构示意图。
43.附图标记:1、船体;2、充电层;3、垃圾处理层;4、第一升降器;41、提升机框架;42、牵引轮;43、升降安装板;44、导向轮;45、导向轮安装板;46、工装支架;47、电机安装板;48、电机;49、工装板;5、第一转位机械手;6、垃圾仓二次处理工站;61、固定板;62、第一气缸;63、第二气缸;64、旋转气缸;7、收仓机械手;8、第二升降器;9、第二转位机械手;10、充电基站;11、环形输送线;12、吃水位标识线;13、垃圾收集流道;14、绝缘板;15、脱钩。
具体实施方式
44.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
45.参考图1-图5,一种海洋漂浮物处理装置,包括船体1,船体1包括充电层2和垃圾处理层3,垃圾处理层3位于充电层2的上方,垃圾处理层3的外侧表面上安装有多个等距分布的第一升降器4,第一升降器4的一侧设置有第一转位机械手5,垃圾处理层3上方设置有垃圾仓二次处理工站6,第一转位机械手5的一侧设置有收仓机械手7,收仓机械手7安装在垃圾处理层3上;
46.充电层2的内壁上安装有多个第二升降器8,第二升降器8的一侧安装有第二转位机械手9,充电层2中间设置有多个充电基站10,充电基站10的一侧安装有环形输送线11,第二转位机械手9位于环形输送线11的一侧;
47.第一升降器4包括提升机框架41、牵引轮42、升降安装板43、导向轮44、导向轮安装板45、工装支架46、电机安装板47、电机48和工装板49;
48.垃圾仓二次处理工站6包括固定板61、第一气缸62、第二气缸63和旋转气缸64,首先整个处理装置是搭建在一个大的铝合金框架上的,第二气缸63和旋转气缸63都是固定在这个大框架上,在不工作的时候,固定板61朝上,准备迎接垃圾仓,当收仓机械手7把垃圾仓运过来的同时固定在固定板61上,然后旋转气缸64把整个垃圾仓翻一下,使垃圾仓开口朝下,第二气缸63往上顶第一气缸62朝内顶夹住垃圾仓内的滤网,使滤网可以做上下的往复运动,类似于抖动,把粘在滤网上的垃圾弄下来,第一气缸62和第二气缸63两侧对称布置,可以更好的夹住滤网进行运动。
49.参考图1,第一升降器4与第二升降器8的结构相同,且均为丝杆升降器,丝杆升降器的可靠性高、故障率低、比较耐用以及方便维护,大大提高了第一升降器4与第二升降器8使用寿命。
50.参考图1,船体1的外侧表面上设置有吃水位标识线12,船体1上安装有脱钩15,通过吃水位标识线12,能够船体1工作吃水深度,避免船体1在工作的时候发生搁浅,通过脱钩15方便船体1的拖拽,提高移动的灵活性能。
51.参考图1,垃圾仓二次处理工站6的下表面上连接有垃圾收集流道13,垃圾收集流道13安装在垃圾处理层3的上表面上,通过垃圾仓二次处理工站6上连接的垃圾收集流道13,方便垃圾汇集流通到粉碎机中,进行粉碎处理。
52.参考图3,充电基站10为无线充电基站,通过无线充电基站提高机器人充电的便捷性,减小充电插线的时间,提高工作的效率。
53.参考图1,充电层2的表面上固定安装有绝缘板14,第二转位机械手9、环形输送线11和充电基站10均安装在绝缘板14上,通过绝缘板14提高充电层2内侧地面的绝缘效果,避免船体1第二转位机械手9和环形输送线11触电。
54.参考图1和图2,其中一个第二升降器8与其中一个第二转位机械手9安装在充电层2的出仓口一侧,其中一个第一转位机械手5安装在充电层2的出仓口的上方,通过充电层2的出仓口一侧安装的第二升降器8方便将充满电的机器人运输到充电层2上,通过第二转位机械手9将机器人移动到其中一个第一升降器4中,将其送下水继续工作。
55.参考图1,船体1上设置有垃圾处理模块,垃圾处理模块包括粉碎单元和裂化釜加工单元和精馏加工单元,粉碎单元用于对垃圾收集流道13内的垃圾通过粉碎机设备进行粉碎,形成塑料小颗粒,裂化釜加工单元用于对粉碎后的塑料小颗粒通过裂化釜加热熔融塑料小颗粒至气体,精馏加工单元用于对气体通过精馏塔进出精馏处理筛分出需要的气体然后分别送至不同的气罐中,通过垃圾处理模块方便对塑料垃圾深加工,通过粉碎单元将垃圾进行粉碎,形成塑料小颗粒,通过裂化釜加工单元将塑料小颗粒加热形成塑料气体,通过精馏加工单元将塑料气体形成可燃气体分子。
56.参考图1,裂化釜加工单元中设置有搅拌子单元和温度控制子单元,搅拌子单元用于对裂化釜加热熔融塑料的小颗粒进行均匀搅拌,受热均匀,温度控制子单元用于控制裂
化釜加热温度,通过搅拌子单元能够提高裂化釜加热搅拌的均匀性,受热更加均匀,有助于提高加工效率,通过温度控制子单元能够精准控制塑料小颗粒形成输料气体的温度。
57.参考图1,精馏加工单元通过设有的管道分别连接有汽油催化罐和柴油催化罐,汽油催化罐和柴油催化罐通过设有的管道与精馏加工单元连接时,气体送过来后和汽油催化罐和柴油催化罐中的催化剂进行反应,从而生成汽油或者柴油。
58.参考图6,图中,1-转位机械手工站、2-升降模块工站、3-收仓机械手工站、4-垃圾收集流道及处理转化工站、5-垃圾仓二次处理工站、6-输送线工站;确定了海洋漂浮物处理装置的设计要求后,根据设计要求初步拟定各项设计参数。首先升降模块的高度为10m,宽度正好能够卡入机器人,内部的升降装置高度为5m。转位机械手要能够完成180
°
的半回转运动。收仓机械手与转位机械手相同,都要能够完成180
°
的半回转运动,两类机械手的活动范围皆为2m
×
2m
×
2m。船体两侧均布两类机械手各5个,以进行分批多次处理机器人的功能。流道长26m宽5m一次性通过的垃圾也是很多的。下方5m处设置为机器人充电的部分,通过输送线缓速运行进行无线充电。上方的裂化釜秉持尽可能多的处理废塑料设想,设计成直径4m的大型熔炉,预计可容纳25.12立方米的塑料小颗粒。精馏塔根据裂化釜容积来确定为直径2m,可容纳1.52立方米的气体。随后分别进入直径0.5m的两个气罐,和里面的催化剂融合后形成汽柴油。该装置总体设计为在一艘无动力的海上平台上,平台尺寸为长28m宽22m高10m,平台后方可由船拖曳进行作业,节省的大量的成本。
59.参考图7,首先在海中的机器人会游到工装板上,略微抬起工装板使得机器人刚好卡入工装板内,之后再整个由电机驱动导向轮,用钢索把升降板抬起来,抬至相应的高度后就由机械手把机器人转运走。下降动作相同。以下标注一下具体部位的零件。
60.参考图8,内部升降装置的作用主要是把机器人从上层运送至下层,以进行后续的充电工作。主要零部件设计皆与外部升降装置一致,只有高度改为原来的一半,也就是5m。
61.参考图9,机械手技术业已成熟,因此此处机械手部分不进行设计,主要对于机械手末端执行器,也就是针对海洋垃圾回收机器人的夹具进行具体设计。机械手选用kr340r3330型重载机械手,此机械手为六轴机械手,工作区域3326mm,负载418kg,防护级别ip65,精度0.08mm,经过挑选,完全符合本工站机械手运行标准,故选用此机械手。考虑到海水含盐量高,对零部件有慢性腐蚀的性质,所有铝合金材料采用7075铝合金,不锈钢材料采用316不锈钢。
62.参考图10,夹具总体结构设计为横向由一个气缸带动拉板从而控制夹爪安装板实现y方向上的夹紧动作,纵向由四个气缸带动夹爪活动钣金从而控制夹爪实现x方向的夹紧动作。以下从两个大部分来阐述夹具的具体结构设计。
63.参考图11,机械手末端为法兰端面,因此首先考虑到与机械手相连接,设计机械手安装板,中间环形法兰面与机械手连接,四周设置四个凸台,用其中两个来与连接支架相连接。连接支架又是固定在安装板上的,这样就把机械手安装板固定在了总的安装板上,也就是2号件。机械手安装板和安装板中间使用了球轴承和台阶销钉来固定双头连杆,双头连杆两头都连接着连杆,而两头的连杆又与连杆拉板相连接,这就形成了双向的曲柄滑块机构,可以同时带动两侧的连杆拉板进行夹紧与松开动作。
64.参考图12,气缸安装在安装板上,由浮动接头连接到连杆拉板上,为了减震,提高气缸轴的动态性能,不将气缸轴直接与安装板相连接,而是采用浮动接头固定在拉板上,浮
动接头与气缸轴连接,这样也能防止气缸憋缸,破坏气缸。气缸做往复直线运动,带动拉板也做同样的运动。1号件是防撞块,内表面涂有优力胶,起到一个限位作用,其次就是防止撞击破坏零部件。三根横轴主要起到导向作用,用来引导导轨安装板执行横向的运动。
65.参考图13,导轨安装板是固定在拉板上的,这样气缸控制拉板横向移动就可以带动导轨安装板的移动,为了限制导轨安装板的移动距离和方向,使用三根导向轴来引导。在导轨安装板上下各装有夹爪安装板,用来放置夹爪和气缸。夹爪安装板末端处固定两个夹爪,首部使用气缸带动两个夹爪,使得四个夹爪能够正好夹住机器人的身体部分。移动的两个夹爪放置在移动钣金上,移动钣金和气缸配合,由背部的两个导向轴引导方向。左右两边对称布置,一共16只夹爪,可以将机器人牢牢的夹紧,因此下一步就应当分析零部件的受力情况,能否支撑住夹住机器人并做举起和旋转的动作。
66.使用原理及优点:
67.该海洋漂浮物处理装置在使用的时候,首先第一升降器4做往复的上升和下降工作,当海洋垃圾回收机器人收集完垃圾之后,回到第一升降器4上,第一升降器4搭载机器人上升至预定高度,随后的第一转位机械手5将机器人夹取旋转至另一边,先由收仓机械手7把机器人身上的垃圾仓取出放入中间位置的垃圾仓二次处理工站6,随后垃圾仓二次处理工站6会将垃圾仓翻转,让里面的垃圾倒入垃圾收集流道13中,经过清洗的垃圾仓会被收仓机械手7再安装回机器人身上,然后第一转位机械手5把机器人放在内部的第二升降器8上,第二升降器8把机器人运下来,由充电层2的第二转位机械手9把机器人放在环形输送线11上,里面一圈为充电基站10,机器人经过环形输送线11到达指定位置后,环形输送线11停止运行,由充电基站10提供无线充电,机器人电充满后,环形输送线11运送至出仓口。
68.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。