1.本发明涉及一种电动阀。尤其是,本发明涉及一种在壳体的内侧配置有磁性转子的电动阀。
背景技术:
2.专利文献1、2记载了以往的电动阀的一例。专利文献1的电动阀具有用于驱动阀芯的磁性转子和与磁性转子一同旋转的永磁体。磁性转子和永磁体配置于壳体的内侧。在配置于壳体的上方的基板上设置有磁传感器。该电动阀通过磁传感器检测永磁体的磁力,从而获得磁性转子的旋转角度。
3.专利文献2的电动阀具有用于驱动阀芯的磁性转子、固定于磁性转子的旋转轴的磁鼓以及设置于上述旋转轴的上端部的磁铁。磁性转子、磁鼓以及磁铁配置于壳体的内侧。在壳体的外侧配置有旋转角检测用磁传感器和上下位置检测用磁传感器。该电动阀通过旋转角检测用磁传感器和上下位置检测用磁传感器检测磁鼓和磁铁的磁力,从而计算阀开度。
4.现有技术文献
5.专利文献
6.专利文献1:日本特开2018-179133号公报
7.专利文献2:日本特开2001-12633号公报
8.发明所要解决的技术问题
9.上述的电动阀具有与磁性转子为不同的零件的永磁体、磁鼓。因此,上述的电动阀有零件数量增加而构造变得复杂,从而制造成本上升的技术问题。为了抑制零件数量的增加,例如专利文献1的电动阀能够具有通过基板上的磁传感器检测磁性转子的磁力的结构。然而,在该结构中,基板与磁性转子相距较远。因此,不能够通过基板上的磁传感器正确地检测磁性转子的磁力。
技术实现要素:
10.因此,本发明的目的在于提供一种通过零件数量较少的结构可靠地检测从磁性转子产生的磁通的电动阀。
11.用于解决技术问题的技术手段
12.为了达成上述目的,本发明的电动阀,具有:阀主体;圆筒状的壳体,该壳体安装于所述阀主体;圆筒状的磁性转子,该磁性转子配置于所述壳体的内侧;阀芯,通过所述磁性转子的旋转该阀芯被驱动为对所述阀主体内的端口进行开闭;以及定子,该定子配置于所述壳体的外侧,在所述磁性转子的外周面,在该磁性转子的旋转轴方向上延伸的一个或者多个n极和s极以在周向上交替地排列的方式设置,磁传感器配置为隔着所述壳体与所述磁性转子在径向上相对,当从所述旋转轴方向上观察时,所述磁传感器配置于通过所述磁性转子的旋转轴和所述定子所具有的多个极齿中的一个极齿的中心的直线上。
13.根据本发明,在壳体的内侧配置有磁性转子。在磁性转子的外周面,在该磁性转子的旋转轴方向上延伸的一个或者多个n极和s极以在周向上交替地排列的方式设置。并且,磁传感器配置为隔着壳体与磁性转子在径向上相对。从磁性转子的磁极(n极、s极)产生的磁通容易在径向上传递。因此,通过将磁传感器以与磁性转子在径向上相对的方式接近地配置,能够向磁传感器有效地传递磁通。由此,本发明能够通过零件数量较少的结构可靠地检测从磁性转子产生的磁通。
14.另外,当从旋转轴方向观察时,磁传感器配置在通过磁性转子的旋转轴和定子所具有的多个极齿中的一个极齿的中心(包括大致中心)的直线上。在定子具有多个极齿的结构中,当磁性转子停止旋转时,成为以下状态中的任一种:(i)极齿与磁性转子的磁极正对的状态;(ii)极齿与磁性转子的外周面中的相邻的磁极间的部位正对的状态。在上述(i)的状态下,在从旋转轴方向观察到的极齿的位置处,从n极朝向s极的磁通所包含的径向成分最大,并且向磁传感器传递的磁通最多。在上述(ii)的状态下,在从旋转轴方向观察到的极齿的位置处,从n极朝向s极的磁通所包含的径向成分最小,并且向磁传感器传递的磁通最少。因此,能够明确地区分上述(i)的状态与上述(ii)的状态,从而能够高精度地得出磁性转子的停止位置。另外,基于检测出的磁通的波形,能够得出磁性转子的旋转方向。
15.在本发明中,优选的是,在所述定子的内周面设置定位凹部,该定位凹部收容所述磁传感器。由此,能够将磁传感器相对于定子适当地定位。
16.在本发明中,优选的是,在关闭所述端口时所述磁性转子向所述旋转轴方向的一侧移动,且在打开所述端口时所述磁性转子向所述旋转轴方向的另一侧移动,在关闭所述端口的状态下所述磁传感器相比所述磁性转子的所述另一侧的端面配置于所述一侧,并且在使所述端口全开的状态下所述磁传感器相比所述磁性转子的所述一侧的端面配置于所述另一侧。由此,在从关闭端口的状态(闭阀状态)到使端口全开的状态(开阀状态)的任意状态下,在旋转轴方向上移动的磁性转子与磁传感器均在径向上相对。因此,能够可靠地检测磁性转子的磁通,从而能够高精度地得出磁性转子的旋转角度。
17.在本发明中,优选的是,在关闭所述端口时所述磁性转子向所述旋转轴方向的一侧移动,且在打开所述端口时所述磁性转子向所述旋转轴方向的另一侧移动,所述磁传感器相比所述定子的所述多个极齿配置于所述另一侧,并且配置为在关闭所述端口的状态下隔着所述壳体与所述磁性转子在径向上相对。由此,在从关闭端口的状态(闭阀状态)到使端口全开的状态(开阀状态)的任意状态下,在旋转轴方向上移动的磁性转子与磁传感器均在径向上相对。因此,能够可靠地检测磁性转子的磁通,从而能够高精度地得出磁性转子的旋转角度和旋转方向。
18.在本发明中,优选的是,在从关闭所述端口的状态到使所述端口全开的状态的任意状态下,所述磁传感器的所述旋转轴方向上的位置均处于所述磁性转子的全长的范围内。由此,在从关闭端口的状态(闭阀状态)到使端口全开的状态(开阀状态)的任意状态下,磁性转子与磁传感器均在径向上相对。因此,能够可靠地检测磁性转子的磁通,从而能够高精度地得出磁性转子的旋转角度和旋转方向。
19.在本发明中,优选的是,在从关闭所述端口的状态到使所述端口全开的状态的任意状态下,所述定子的所述旋转轴方向上的位置均处于所述磁性转子的全长的范围内。由此,在从关闭端口的状态(闭阀状态)到使端口全开的状态(开阀状态)的任意状态下,均能
够使定子的磁力有效地作用于磁性转子,从而能够使磁性转子有效地旋转。
20.在本发明中,优选的是,还具有箱,该箱收容所述壳体和所述定子,在所述箱还收容有基板,所述磁传感器通过电线与所述基板连接。由此,能够将磁传感器配置于远离基板的部位。因此,能够较为自由地设定基板的位置和姿势。
21.发明的效果
22.根据本发明,能够通过零件数量较少的结构可靠地检测从磁性转子产生的磁通。
附图说明
23.图1是表示本发明的第一实施例的电动阀的闭阀状态的纵剖视图。
24.图2是表示图1的电动阀的开阀状态的纵剖视图。
25.图3是说明图1的电动阀的磁性转子和定子的图。
26.图4是图1的电动阀的定子的纵剖视图。
27.图5是表示本发明的第二实施例的电动阀的闭阀状态的纵剖视图。
具体实施方式
28.(第一实施例)
29.以下,参照图1~图4对本发明的第一实施例的电动阀进行说明。本实施例的电动阀1例如用于在制冷循环等中调节制冷剂流量。第二实施例的电动阀也相同。
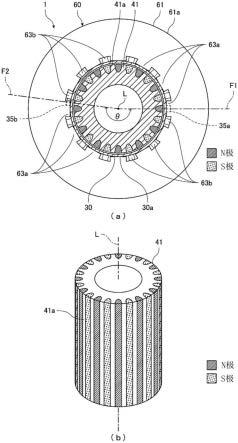
30.图1、图2是沿着本发明的第一实施例的电动阀的轴线l的剖视图(纵剖视图)。图1表示闭阀状态的电动阀。图2表示开阀状态的电动阀。图3是说明图1的电动阀的磁性转子和定子的图。图3的(a)是沿着图2的x-x线的剖视图。在图3的(a)中,仅表示壳体、磁性转子以及定子的上段定子的磁轭。另外,在图3的(a)中,以虚线表示磁传感器的位置。图3的(b)是磁性转子的立体图。在图3的(a)、(b)中,示意性地表示磁性转子的磁极(n极、s极)。图4是图1的电动阀的定子的纵剖视图。图4表示沿着图3的(a)的直线f1和直线f2的剖面。
31.如图1、图2所示,电动阀1具有阀主体10、壳体30、磁传感器35a、35b、驱动机构40、阀芯50、定子60以及箱70。
32.阀主体10例如由铝合金等金属材料构成。阀主体10具有主体部11和圆筒部12。主体部11形成为长方体状。圆筒部12从主体部11的上表面11a朝向上方突出。在主体部11的内部设置有阀室13。在主体部11设置有向图1的左侧延伸的流路17和向图1的右侧延伸的流路18。流路17与阀室13连接。流路18经由向阀室13开口的端口19而与阀室13连接。
33.在圆筒部12的外周面的一部分设置有外螺纹部12b。在主体部11设置有在上表面11a开口的内螺纹部11b。通过外螺纹部12b与内螺纹部11b螺合,主体部11和圆筒部12一体地结合。圆筒部12的内侧空间与阀室13连接。
34.阀主体10还具有凸缘部20。凸缘部20例如由不锈钢等金属材料构成。凸缘部20形成为圆环板状。凸缘部20的内周缘20a通过钎焊等与圆筒部12的上端部接合。
35.壳体30例如由不锈钢等金属材料构成。壳体30形成为上端被封闭的圆筒状。壳体30的下端部通过焊接等而与凸缘部20的外周缘20b接合。在壳体30的内侧配置有驱动机构40。
36.磁传感器35a、35b例如由霍尔ic构成。霍尔ic具有霍尔元件,并且输出与通过感磁
面的磁通密度的方向和大小对应的信号。磁传感器35a、35b也可以由除了霍尔ic以外的种类的磁传感器构成。能够基于磁传感器35a、35b所输出的信号获得磁性转子41的旋转角度和旋转方向。在本实施例中,虽然是具有两个磁传感器35a、35b的结构,但也可以是仅具有一个磁传感器的结构。
37.磁传感器35a、35b被收容于定子60的定位凹部66a、66b。磁传感器35a、35b配置于壳体30的外周面30a上。优选的是,磁传感器35a、35b与壳体30的外周面30a接触地配置。磁传感器35a、35b也可以与壳体30的外周面30a隔开间隔地配置,能够检测磁性转子41的磁力即可。即,磁传感器35a、35b也可以接近壳体30的外周面30a地配置。磁传感器35a、35b配置为各自的感磁面沿着壳体30的外周面30a。
38.驱动机构40将阀芯50在上下方向上驱动。驱动机构40具有磁性转子41、阀轴保持架42、导向衬套43以及阀轴44。
39.磁性转子41形成为大致圆筒状。磁性转子41的外径比壳体30的内径略小。在磁性转子41的外周面41a设置有多个n极和多个s极。多个n极和多个s极在轴线l方向上延伸,并且在周向上等间隔且交替地配置。n极和s极也可以各设置一个。在本实施例中,12个n极和12个s极以15度间隔交替地配置。磁性转子41配置为能够在壳体30的内侧旋转。图3的(a)、(b)表示磁性转子41的n极和s极的配置示意图。在图3的(a)、(b)中,斜线区域示意性地表示n极,点区域示意性地表示s极。磁性转子41的旋转轴与轴线l一致。
40.阀轴保持架42形成为上端被封闭的圆筒状。支承环45通过铆接固定于阀轴保持架42的上端部。磁性转子41经由支承环45而与阀轴保持架42一体地结合。在阀轴保持架42的内周面设置有内螺纹部42c。
41.导向衬套43具有大径圆筒部43a和小径圆筒部43b。大径圆筒部43a的外径比小径圆筒部43b的外径大。小径圆筒部43b与大径圆筒部43a的上端部同轴地相连设置。在小径圆筒部43b的外周面设置有外螺纹部43c。外螺纹部43c与阀轴保持架42的内螺纹部42c螺合。大径圆筒部43a压入于阀主体10的圆筒部12的内侧。导向衬套43与阀主体10一体地结合。
42.阀轴44具有圆柱状的躯干部44a和圆柱状的上部小径部44b。上部小径部44b的直径比躯干部44a的直径小。上部小径部44b与躯干部44a的上端部同轴地相连设置。上部小径部44b贯通阀轴保持架42地配置。在上部小径部44b安装有防止脱落用的顶推螺母46。阀轴44在躯干部44a与上部小径部44b之间具有台阶部。在该台阶部与阀轴保持架42之间配置有压缩螺旋弹簧47。通过压缩螺旋弹簧47,阀轴44被朝向下方按压。
43.在阀轴保持架42安装有上止动体48。在导向衬套43的大径圆筒部43a安装有下止动体49。当阀轴保持架42通过旋转而到达下限位置时,上止动体48与下止动体49抵接而限制阀轴保持架42的进一步旋转。
44.阀芯50与阀轴44的下端部一体地设置。通过驱动机构40将阀芯50驱动为在上下方向上移动。阀芯50对在阀室13开口的端口19进行开闭。
45.定子60形成为大致圆筒状。定子60具有由内周面60a划分的嵌合孔60b。嵌合孔60b的内径与壳体30的外径大致相同。定子60的嵌合孔60b与壳体30嵌合。定子60配置于壳体30的外侧。定子60具有上段定子61、下段定子62以及合成树脂制的模制件65。
46.上段定子61和下段定子62上下重叠地配置。如图4所示,上段定子61具有磁轭61a和经由线圈架61b而卷绕在磁轭61a的线圈61c。磁轭61a具有多个爪极型的极齿63。多个极
齿63在周向上等间隔排列地配置。在本实施例中,磁轭61a具有24个极齿63。多个极齿63具有顶端(较细的端部)朝向下方的向下极齿63a和顶端朝向上方的向上极齿63b。多个向下极齿63a与多个向上极齿63b在周向上交替地配置。
47.上段定子61和下段定子62上下重叠地配置。如图7所示,上段定子61具有磁轭61a和经由线圈架61b而卷绕在磁轭61a的线圈61c。磁轭61a具有多个爪极型的极齿63。多个极齿63在周向上等间隔排列地配置。在本实施例中,磁轭61a具有24个极齿63。多个极齿63具有顶端(较细的端部)朝向下方的向下极齿63a和顶端朝向上方的向上极齿63b。多个向下极齿63a与多个向上极齿63b在周向上交替地配置。
48.下段定子62具有与上段定子61相同的结构。下段定子62具有磁轭62a、线圈架62b、线圈61c以及多个爪极型的极齿64(向下极齿64a和向上极齿64b)。下段定子62相对于上段定子61在周向上偏移多个极齿63的间隔的一半的量地配置。在本实施例中,多个极齿63的间隔和多个极齿64的间隔分别是15度(360度/24),下段定子62相对于上段定子61在周向上偏移7.5度(15度/2)地配置。由上段定子61、下段定子62以及磁性转子41构成步进电机。此外,本实施例虽然是对定子60具有爪极型的极齿的结构进行说明的结构,但是也可以采用具有其他种类的极齿的结构。
49.模制件65被填充于上段定子61和下段定子62内。模制件65与多个极齿63和多个极齿64一同构成定子60的内周面60a。模制件65具有环状部66和端子支承部67。
50.环状部66形成为圆环状。环状部66具有与壳体30的外径相同的内径。环状部66配置于上段定子61的上表面。在环状部66的内周面(即,内周面60a的上部)设置有定位凹部66a、66b。定位凹部66a、66b是收容磁传感器35a、35b的凹部。定位凹部66a、66b向上方开口。在一方的定位凹部66a收容有磁传感器35a。在另一方的定位凹部66b收容有磁传感器35b。
51.磁传感器35a、35b配置为在从关闭端口19的状态(闭阀状态)到使端口19全开的状态(开阀状态)的任意状态下均隔着壳体30与磁性转子41的外周面41a在该磁性转子41的径向上相对。另外,磁传感器35a、35b在闭阀状态下相比磁性转子41的上方侧的端面配置于下方侧,在开阀状态下相比磁性转子41的下端侧的端面配置于上方侧。磁传感器35a、35b相比多个极齿63配置于上方侧。
52.另外,从磁性转子41的旋转轴方向观察时,磁传感器35a配置在通过旋转轴(轴线l)与上段定子61的一个极齿63的中心的直线f1上。极齿63的“中心”除了中心还包括大致中心,在以下的说明中也同样。在具有具备多个爪极型的极齿63的磁轭61a的结构中,当磁性转子41停止旋转时,成为以下状态中的任一种:(i)极齿63与磁性转子41的磁极正对的状态;(ii)极齿63与磁性转子41的外周面41a中的相邻的磁极间的部位正对的状态。在上述(i)的状态下,在从旋转轴方向观察到的极齿63的位置处,从n极朝向s极的磁通所包含的径向成分最大,并且向磁传感器35a传递的磁通最多。在上述(ii)的状态下,在从旋转轴方向观察到的极齿63的位置处,从n极朝向s极的磁通所包含的径向成分最小,并且向磁传感器35a传递的磁通最少。因此,能够明确地区分上述(i)的状态与上述(ii)的状态,从而能够高精度地得出磁性转子的停止位置。另外,基于检测出的磁通的波形,能够得出磁性转子41的旋转方向。
53.从磁性转子41的旋转轴方向观察时,磁传感器35b配置在通过旋转轴和下段定子62的一个极齿64的中心的直线f2上。在磁传感器35b中,也与上述同样地能够明确地区分上
述(i)的状态和上述(ii)的状态,从而能够高精度地得出磁性转子的停止位置。
54.另外,优选的是,磁传感器35a与磁传感器35b隔开以下的公式(1)所示的间隔θ[度]地配置。
[0055]
θ=(90/n) (360
×
m)/n
…
(1)
[0056]
其中,n为一个定子所具有的极齿数的1/2的值,m为任意的整数,θ<360度。
[0057]
当磁传感器35a、35b配置为满足上述公式(1)时,磁传感器35a、35b的一方与磁性转子41的磁极正对,另一方与磁性转子41的外周面41a中的相邻的磁极间的部位正对。由此,当磁传感器35a、35b的一方所检测的磁通为最大时,通过另一方检测的磁通为最小。因此,能够进一步高精度地得出磁性转子41的旋转角度。另外,基于检测出的磁通的波形,能够得出磁性转子41的旋转方向。
[0058]
端子支承部67配置为从上段定子61和下段定子62向侧方(图1的右侧)延伸。端子支承部67埋入有多个端子68。多个端子68与上段定子61的线圈61c和下段定子62的线圈62c连接。多个端子68从端子支承部67的顶端67a突出,并且通过柔性基板等与后述的基板75连接。
[0059]
箱70形成为大致长方体箱状。箱70配置为收容壳体30和定子60。箱70具有朝向阀主体10侧突出的圆筒状的筒状部73。筒状部73配置为包围阀主体10的圆筒部12。筒状部73配置为包围阀主体10的圆筒部12。在筒状部73与圆筒部12之间以压缩状态配置有密封部件100。密封部件100是由橡胶材料等弹性材料构成的圆环状的o型圈。
[0060]
另外,箱70收容基板75。基板75是供电子零件安装的印刷基板。基板75以与轴线l正交的姿势配置于壳体30的上方。此外,基板75的位置和姿势是任意的。基板75通过电线77与磁传感器35a、35b连接。电线77例如是弯曲和拉伸自如且能够将形状维持在可以自立的程度的引线、柔性基板等。在基板75也可以安装有由计算机等构成的运算装置。运算装置是例如基于通过磁传感器35a、35b输出的信号来计算磁性转子41的旋转角度、阀开度(端口19的开度)的结构。
[0061]
在电动阀1中,阀主体10的圆筒部12、端口19、壳体30、磁性转子41、阀轴保持架42、导向衬套43、阀轴44、阀芯50、定子60(上段定子61、下段定子62、模制件65的环状部)以及箱70的筒状部73各自的轴与轴向l一致。换而言之,这些部件全部同轴地配置。轴向l方向与上下方向一致。
[0062]
接着,对电动阀1的动作进行说明。
[0063]
在电动阀1中,对上段定子61和下段定子62通电,以使磁性转子41向一方向旋转。阀轴保持架42与磁性转子41一同进行旋转。通过阀轴保持架42的内螺纹42c与导向衬套43的外螺纹43c的螺纹进给作用,磁性转子41和阀轴保持架42向下方(即,旋转轴方向的一侧)移动。阀轴44也与阀轴保持架42一同向下方移动,从而阀芯50关闭端口19(闭阀状态)。
[0064]
另外,在电动阀1中,对上段定子61和下段定子62通电,以使磁性转子41向另一方向旋转。阀轴保持架42与磁性转子41一同进行旋转。通过阀轴保持架42的内螺纹42c与导向衬套43的外螺纹43c的螺纹进给作用,磁性转子41和阀轴保持架42向上方(即,旋转轴方向的另一侧)移动。阀轴44也与阀轴保持架42一同向上方移动,从而阀芯50打开端口19(开阀状态)。
[0065]
并且,当磁性转子41旋转时,设置于外周面41a的各n极和各s极与磁传感器35a、
35b的位置关系产生变化,从而通过磁传感器35a、35b检测的磁通密度的方向和大小产生变化。由此,根据磁性转子41的旋转角度,从磁传感器35a、35b输出的信号变化,能够基于该信号得出磁性转子41的旋转角度和旋转方向。
[0066]
通过以上,根据本实施例的电动阀1,在配置于壳体30的内侧的磁性转子41的外表面41a,在该磁性转子41的旋转轴方向上延伸的多个n极和多个s极以在周向上交替地排列的方式设置。并且,在壳体30的外周面30a上配置有隔着壳体与磁性转子41在径向上相对的磁传感器35a、35b。在磁性转子41的磁极(n极、s极)产生的磁通容易在径向上传递。因此,通过将磁传感器35a、35b以与磁性转子41在径向上相对的方式接近地配置,能够向磁传感器35a、35b有效地传递磁通。由此,能够通过零件数量较少地结构可靠地检测从磁性转子41产生的磁通。
[0067]
另外,在定子60的内周面60a设置有收容磁传感器35a、35b的定位凹部66a、66b。由此,能够将磁传感器35a、35b相对于定子60的极齿63、64适当地定位。
[0068]
另外,在关闭端口19时磁性转子41向下方移动且在打开端口19时磁性转子41向上方移动。磁传感器35a、35b相比定子60的上段定子61的多个极齿63配置于上方。并且,磁传感器35a、35b配置为在关闭端口的状态下隔着壳体30与磁性转子41在径向上相对。由此,磁性转子41与磁传感器35a、35b从闭阀状态到开阀状态下在径向上相对。因此,在从闭阀状态到开阀状态的任意状态下,均能够可靠地检测磁性转子41的磁通,从而能够高精度地得出磁性转子41的旋转角度和旋转方向。
[0069]
另外,电动阀1具有箱70,该箱70收容壳体30和定子60。在箱70收容有基板75。并且,磁传感器35a、35b通过电线77与基板75连接。由此,能够将磁传感器35a、35b配置于远离基板75的部位。因此,能够较为自由地设定基板75的位置和姿势。
[0070]
(第二实施例)
[0071]
以下,参照图5对本发明的第二实施例的电动阀进行说明。图5是本发明的第二实施例的电动阀的纵剖视图,
[0072]
如图5所示,第二实施例的电动阀2具有阀主体10、壳体30、磁传感器35a、35b、驱动机构80、阀芯55、定子60以及箱70。
[0073]
电动阀2除了具有结构与上述的第一实施例的电动阀1不同的驱动机构80和阀芯55以外,具有与电动阀1相同(包括大致相同)的结构。在以下的说明中,对于与上述的第一实施例相同的结构标注相同的符号并省略说明。
[0074]
驱动机构80将阀芯55在上下方向上驱动。驱动机构80具有磁性转子81、行星齿轮机构85、引导部件95、升降轴96、球97以及开阀弹簧98。
[0075]
磁性转子81形成为大致圆筒状。磁性转子81的外径比壳体30的内径略小。在磁性转子81的外周面,与上述的第一实施例的磁性转子41同样地设置有多个n极和多个s极。磁性转子81的旋转轴与轴线l一致。磁性转子81即使旋转也不在旋转轴方向上移动。磁性转子81的上端部经由转子支承部件82与转子轴83一体地结合。步进电机由上段转子61、下段定子62以及磁性转子81构成。
[0076]
在本实施例中,在闭阀状态到开阀状态的任意状态下,磁传感器35a、35b的旋转轴方向上的位置均位于磁性转子81的全长的范围内(即,从磁性转子81的下端到上端之间)。由此,在从闭阀状态到开阀状态的任意状态下,磁性转子81与磁传感器35a、35b在径向上均
相对。因此,能够可靠地检测磁性转子81的磁通,从而能够高精度地得出磁性转子81的旋转角度和旋转方向。
[0077]
另外,在本实施例中,定子60的上段定子61和下段定子62的旋转轴方向上的位置始终处于磁性转子81的全长的范围内。由此,从闭阀状态到开阀状态下,能够使上段定子61和下段定子62的磁力有效地作用于磁性转子81,从而能够使磁性转子81有效地旋转。
[0078]
行星齿轮机构85配置于磁性转子81的内侧。行星齿轮机构85具有太阳齿轮86、固定齿圈87、多个行星齿轮88、行星齿轮架89、输出齿轮90、输出轴91以及齿轮箱92。太阳齿轮86与转子支承部件82一体地设置。固定齿圈87是内齿轮。固定齿圈87固定于圆筒状的齿轮箱92的上端。行星齿轮88配置于太阳齿轮86与固定齿圈87之间。行星齿轮88与太阳齿轮86和固定齿圈87啮合。行星齿轮架89将多个行星齿轮88支承为旋转自如。输出齿轮90形成为有底筒状。输出齿轮90是内齿轮。输出齿轮90从外侧与多个行星齿轮88啮合。输出轴91的上部通过压入等固定于在输出齿轮90的底部形成的孔。齿轮箱92安装于阀主体10的圆筒部12的上端部。
[0079]
引导部件95形成为圆筒状。引导部件95配置于阀主体10的圆筒部12的上端部的内侧。在引导部件95的内周面设置有内螺纹部95a。
[0080]
升降轴96形成为圆柱状。在升降轴96的外周面设置有外螺纹部96a。外螺纹部96a与引导部件95的内螺纹部95a螺合。升降轴96设置有从上端面向上方突出的平板部96b。平板部96b以能够在上下方向移动的方式插入于在行星齿轮机构85的输出轴91设置的狭缝91a。升降轴96伴随着输出轴91的旋转而进行旋转,并且通过外螺纹部96a与内螺纹部95a的螺纹进给作用而在上下方向上移动。
[0081]
球97配置于升降轴96与阀芯55之间。开阀弹簧98由压缩螺旋弹簧构成。开阀弹簧98配置于阀芯55与阀主体10之间。
[0082]
阀芯55形成为大致圆柱状。阀芯55的下端部与端口19在上下方向上相对地配置。阀芯55的上端部经由球97与升降轴96连接。阀芯55通过开阀弹簧98被朝向上方按压。
[0083]
接着,对电动阀2的动作进行说明。
[0084]
在电动阀2中,对上段定子61和下段定子62通电,以使磁性转子81向一方向旋转。当磁性转子81旋转时,升降轴96与行星齿轮机构85的输出轴91一同进行旋转。通过升降轴96的外螺纹部96a与引导部件95的内螺纹部95a的螺纹进给作用,升降轴96向下方(即,旋转轴方向的一侧)移动。阀芯55通过升降轴96被朝向下方按压,从而阀芯55关闭端口19(闭阀状态)。
[0085]
另外,在电动阀2中,对上段定子61和下段定子62通电,以使磁性转子81向另一方向旋转。当磁性转子81旋转时,升降轴96与行星齿轮机构85的输出轴91一同进行旋转。通过升降轴96的外螺纹部96a与引导部件95的内螺纹部95a的螺纹进给作用,升降轴96向上方(即,旋转轴方向的另一侧)移动。当升降轴96向上方移动时,阀芯55通过开阀弹簧98被朝向上方按压,从而阀芯55打开端口19(开阀状态)。
[0086]
并且,当磁性转子81旋转时,设置于外周面的各n极和各s极与磁传感器35a、35b的位置关系产生变化,从而通过磁传感器35a、35b检测的磁通密度的方向和大小产生变化。即,根据磁性转子81的旋转角度,从磁传感器35a、35b输出的信号变化,能够基于该信号得出磁性转子81的旋转角度。
[0087]
本实施例的电动阀2也与上述的第一实施例的电动阀得到同样的作用效果。
[0088]
以上虽然对本发明的实施例进行了说明,但是本发明并不限定于这些例。只要不违背本发明的主旨,本领域技术人员对上述的实施例适当进行结构要素的追加、删除、设计变更而得到的结构、适当组合实施例的特征而得到的结构,也包含在本发明的范围内。
[0089]
符号说明
[0090]
(第一实施例)
[0091]
1...电动阀、10...阀主体、11...主体部、11a...上表面、11b...内螺纹部、12...圆筒部、12b...外螺纹部、13...阀室、17、18...流路、19...端口、20...凸缘部、30...壳体、30a...外周面、35a、35b...磁传感器、40...驱动机构、41...磁性转子、41a...外周面、42...阀轴保持架、42c...内螺纹部、43...导向衬套、43a...大径圆筒部、43b...小径圆筒部、43c...外螺纹部、44...阀轴、44a...躯干部、44b...上部小径部、45...支承环、46...顶推螺母、47...压缩螺旋弹簧、48...上止动体、49...下止动体、50...阀芯、60...定子、60a...内周面、60b...嵌合孔、61...上段定子、61a...磁轭、61b...线圈架、61c...线圈、62...下段定子、62a磁轭、62b...线圈架、62c...线圈、63、64...极齿、63a、64a...向下极齿、63b、64b...向上极齿、65...模制件、66...环状部、66a、66b...定位凹部、67...端子支承部、67a...顶端、68...端子、70...箱、100...密封部件
[0092]
(第二实施例)
[0093]
2...电动阀、55...阀芯、80...驱动机构、81...磁性转子、82...转子支承部件、83...转子轴、85...行星齿轮机构、86...太阳齿轮、87...固定齿圈、88...行星齿轮、89...行星齿轮架、90...输出齿轮、91...输出轴、91a...狭缝、92...齿轮箱、95...引导部件、95a...内螺纹部、96...升降轴、96a...外螺纹部、96b...平板部、97...球、98...开阀弹簧
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。