1.本发明涉及一种井下长距离液控解码和换向方法,特别是关于一种应用于井下牵引机器人控制牵引力、牵引速度的液控解码和换向方法,属于石油天然气开发设备领域。
背景技术:
2.井下机器人牵引连续油管的方法,可以有效解决长水平段钻井面临钻柱“托压”严重和水平段延伸“困难”两大瓶颈问题。采用液压控制方式的井下牵引机器人,为了满足井下牵引的功能,在结构上设置有两个支撑缸和两个伸缩缸,这样就需要四个四通阀和两个电比例溢流阀才能合理的控制牵引机器人的运动。
3.例如,在中国专利公开号cn107477306a公开了一种连续油管牵引机器人的电液控制系统,其公开日为2017年12月15日,该液压控制系统,包括油箱、微型电机、微型液压泵、阀件组及阀件组电控组件,电机由地面通过铠装电缆供电,电机连接液压泵,油箱供给液压油,液压泵连通阀件组,其中液压泵的出液口与四个单向阀连通,单向阀分别与四个三位四通电磁换向阀连通,四个三位四通电磁换向阀分别与前后伸缩缸和前后支撑缸连通。
4.在井下牵引机器人牵引连续油管作业时,影响牵引作业的稳定进行的很重要的原因就是井下牵引机器人控制系统的稳定性,井下牵引机器人控制系统出现故障的原因很复杂,大致可以分为以下几种:(1)井底高温高压的环境侵蚀控制系统的密封部分,从而毁坏井下机器人控制系统,导致井下机器人出现故障。
5.(2)井底的高温环境导致控制系统里面的芯片部分高温,并且控制系统无法有效散热,导致控制系统出现故障,从而破坏井下牵引机器人正常运动。
6.(3)井下控制系统利用电缆线控制,几千米的深度并且牵引机器人属于运动的,可能造成漏电、断线。
7.综上,现有井下机器人牵引连续油管技术存在的主要问题有:1、牵引机器人的电液控制系统中采用的四通阀较多,导致牵引机器人的径向尺寸较大,使得牵引机器人无法应用于更小井径的井段,牵引机器人的应用有较大的局限性。2、采用多根液控管线和多个阀体对多个支撑缸和伸缩缸多档位、换向控制,以实现牵引机器人牵引速度、牵引力控制,增大了井下机器人的结构空间,提高了成本,并且控制的可靠性较低。3、容易出现连续油管屈曲的问题,无法自适应井底工况,不能形成井下闭环牵引连续油管。
技术实现要素:
8.本发明的目的在于克服现有技术存在的上述问题,提供一种井下牵引机器人液控解码和换向方法。本发明井下牵引机器人液控解码和换向系统可以通过活塞、阀芯的移动来实现对井上液控信号的解码,解码过程简单、快捷,从而巧妙地实现对井下牵引机器人的控制。
9.为实现上述目的,本发明采用的技术方案如下:
一种井下牵引机器人液控解码和换向方法,其特征在于,包括解码过程和换向过程;解码过程包括如下步骤:s1、地面液压信号发生系统发出液压控制信号,通过液控解码和换向系统启动牵引机器人;s2、牵引机器人牵引连续油管前进;s3、在牵引连续油管过程中,牵引力测量装置实时测量牵引信息,并实时将测量的牵引信息传递给地面液压信号发生系统;s4、地面液压信号发生系统根据牵引力测量装置测得的牵引信息控制井下牵引机器人以最优方式牵引连续油管前进;换向过程包括:当需要牵引机器人换向时,地面液压信号发生系统向液控解码和换向系统发出液压控制信号,液控解码和换向系统的换向部分开始工作,控制牵引机器人换向。
10.所述步骤s2具体包括:s21:牵引机器人判断影响牵引机器人牵引连续油管的因素,并将这些信息传递给地面液压信号发生系统;s22:地面液压信号发生系统根据这些信号,调整不同液控管线压力大小和先后顺序,液压信息通过液控解码和换向系统控制牵引机器人支撑缸或伸缩缸运动,使牵引机器人以最优牵引速度和最优牵引力牵引连续油管前进。
11.所述步骤s4具体包括:s41:牵引机器人根据牵引力测量装置测量牵引力大小以及井壁特征,计算分析连续油管屈曲程度、井壁粗糙程度的结果信息,并将结果信息实时传递给地面液压信号发生系统;s42:地面液压信号发生系统根据结果信息,计算出需要给不同液压管线提供的压力大小以及压力先后顺序,然后实时控制液控解码和换向系统,实时控制牵引机器人的牵引速度和牵引力。
12.所述液控解码和换向系统包括阀体、阀芯、活塞、阀体端盖、阀芯端盖、大弹簧、小弹簧和换向装置;阀体的内腔室右端为封闭端,左端为开口端,阀体的开口端密封固定连接阀体端盖,阀体上端外壁上开有上腔室,阀体内为内腔室;阀芯设置在内腔室内,阀芯外壁与内腔室滑动密封配合;阀芯内腔右端为封闭端,左端为开口端,阀芯的开口端密封固定连接阀芯端盖;大弹簧一端与阀芯右端连接,另一端固定连接在内腔室上;活塞设置在阀芯内腔中,小弹簧一端与阀芯端盖固定连接,另一端与活塞固定连接;换向装置包括换向阀体、换向弹簧、换向阀体盖板和换向通道,换向阀体位于阀体的上腔室内,上腔室通过换向阀体盖板封闭,换向阀体与换向弹簧一端固定连接,换向弹簧另一端固定连接在上腔室内;换向阀体盖板上设置有回油管道、管道a和管道b,换向阀体上表面设置有两组换向阀体管道口,每组换向阀体管道口为三个,换向阀体处于初始状态时,第一组的三个换向
阀体管道口分别与对应的回油管道、管道a和管道b连通,且与管道a对应的换向阀体管道口与阀体出油通道连通,另外两个换向阀体管道口通过换向阀体内的通道连通;换向阀体处于换向工作状态时,第二组的三个换向阀体管道口分别与对应的回油管道、管道a和管道b连通,且与管道a对应的换向阀体管道口与阀体出油通道连通,与管道a对应的换向阀体管道口还通过换向阀体内的通道和与回油管道连通的换向阀体管道口连通;阀体上端开有阀体出油通道和换向装置的换向通道,阀体的内腔室和上腔室通过阀体出油通道连通,换向通道与换向阀体左端的上腔室连通;阀体下端开有与内腔室连通的右进油通道和左进油通道;阀芯的下端开有分别与右进油通道和左进油通道配合的阀芯右通道和阀芯左通道,阀芯上端开有与阀体出油通道配合的阀芯出油通道。
13.所述左进油通道通过液控管线连接到地面液压信号发生系统的管线1,右进油通道通过液控管线连接到地面液压信号发生系统的管线2,回油管道通过液控管线连接到地面液压信号发生系统的管线3,换向通道通过液控管线连接到地面液压信号发生系统的管线4,管道a和管道b通过液控管线连接到井下牵引机器人的支撑缸或伸缩缸。
14.所述阀芯在初始状态时,小弹簧处于自然伸长状态,大弹簧处于压缩状态,阀芯处于阀体内腔室最左端位置。
15.所述活塞在初始状态时,活塞与阀芯左通道不完全重合,部分阀芯左通道与活塞左端腔室连通;阀芯左通道与左进油通道不完全重合,阀芯左通道与部分左进油通道连通;阀芯出油通道与阀芯右通道连通,阀芯出油通道与阀体出油通道不连通。
16.所述阀体的上腔室内设置有两个换向阀挡板,换向阀挡板设置在上腔室右端且两个换向阀挡板成对称布置。
17.所述左进油通道与左进油管道连接,左进油管道通过液控管线连接到地面液压信号发生系统的第一管线;右进油通道与右进油管道连接,右进油管道通过液控管线连接到地面液压信号发生系统的第二管线。
18.第一组换向阀体管道口包括换向阀体管道口d、换向阀体管道口e和换向阀体管道口f,换向阀体管道口e和换向阀体管道口f通过换向阀体内的通道连通;换向阀体处于初始状态时,换向阀体处于上腔室最左端,换向阀体管道口d上端与管道a连通,下端与阀体出油通道连通,换向阀体管道口e与回油管道连通,换向阀体管道口f与管道b连通。
19.所述第二组换向阀体管道口包括换向阀体管道口a、换向阀体管道口b和换向阀体管道口c,换向阀体管道口a和换向阀体管道口b通过换向阀体内的通道连通;换向阀体处于换向工作状态时,在换向通道的液压力作用下换向阀体向右移动,换向弹簧处于压缩状态,换向阀体管道口a上端与管道a连通,下端与与阀体出油通道连通,换向阀体管道口b与回油管道连通,换向阀体管道口c与管道b连通,换向阀体右端被换向阀挡板限位。
20.所述换向阀体盖板上贯通设置有三个换向盖板出油通道,回油管道、管道a和管道b分别连接在三个盖板出油通道上。
21.所述液控解码和换向系统处于解码状态时,换向阀体处于阀体上腔室最左端,阀芯处于阀体内腔右端位置,大弹簧和小弹簧处于压缩状态,活塞与阀芯左通道处于完全重合状态,阀芯出油通道与阀体出油通道连通,阀芯右通道与右进油通道连通,液压介质依次通过右进油管道、右进油通道、阀芯右通道、阀芯内腔、阀芯出油通道、阀体出油通道、换向
阀体出油通道、换向盖板出油通道、管道a和液控管线进入井下牵引机器人的支撑缸或伸缩缸。
22.采用本发明的优点在于:(1)本发明可以通过活塞、阀芯的移动来实现对井上液控信号的解码,解码过程简单、快捷,从而巧妙地实现对井下牵引机器人的控制。
23.(2)在液压控制信号解码以后再进行换向功能,可以减小换向阀体的体积,节省井下空间,便于其它井下工具的安装。
24.(3)液控解码阀体组成部分和换向阀体组成部分巧妙的一体式安装,在节省了空间的同时增加了装置的稳定性、可靠性。
25.(4)巧妙地利用液控解码、换向原理实现了利用液压控制的方式对井下牵引机器人运动控制,避免井底高温高压环境对传统电控方式的影响,增加了控制的稳定性。
26.(5)通过地面液压信号发生系统产生液压信号,液压信号通过井下牵引机器人液控解码和换向系统然后对牵引机器人运动控制,牵引力测量装置实时测量牵引机器人受力等相关信息并将信息实时传递给地面液压信号发生系统,然后控制系统调整液压力以调整牵引机器人的牵引力和速度,实现了牵引机器人的最佳运动方式,解决了连续油管屈曲的问题。
27.(6)这种方案能自适应井底工况,形成井下闭环牵引连续油管,智能连续牵引连续油管,控制稳定、安全、可靠。
28.综上,本发明实现了利用少量的液控管线和少量的阀体对多个支撑缸和伸缩缸实现多档位、换向控制,节省井下机器人结构空间、节约成本,提高工作效率和可靠性,并且有效解决井底高温高压环境对井下牵引机器人控制系统影响。通过纯液压的方法实现井下牵引机器人伸缩缸、支撑缸解码、换向控制,可以实现井下牵引机器人高效、稳定的运动控制,从而实现井下牵引机器人稳定、持续牵引连续油管前进。
附图说明
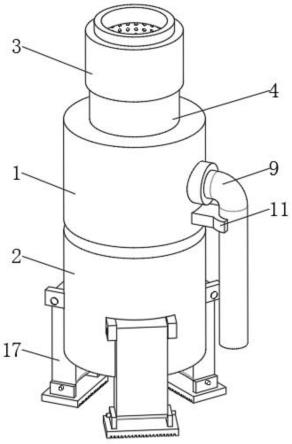
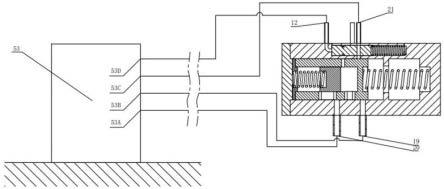
29.图1为井下牵引机器人液控解码和换向系统初始位置剖面图;图2为井下牵引机器人液控解码和换向系统的俯视图;图3为井下牵引机器人液控解码和换向系统的立体视图;图4为换向阀体的主视图和其相应的剖面图;图4a为图4中的a—a向剖面图;图4b为图4中的b—b向剖面图;图4c为图4中的c—c向剖面图;图4d为图4中的d—d向剖面图;图5为阀体的立体视图;图6为阀芯的立体视图;图7为井下牵引机器人液控解码和换向系统终点位置剖面图;图8 为牵引机器人结构简图;图9为地面液压信号发生系统及管线。
30.图中:1、右进油通道,2、左进油通道,3、阀芯右通道,4、阀芯左通道,5、阀芯,6、活
塞,7、阀体端盖,8、阀芯端盖,9、小弹簧,10、换向阀体,11、换向通道,12、换向管道,13、管道b,14、管道a,15、换向阀体盖板,16、换向弹簧,17、大弹簧,18、阀体,19、右进油管道,20左进油管道,21、回油管道,22、换向阀体管道口a,22a、换向阀体管道口上端,22b、换向阀体管道口下端,23、换向阀体管道口b,24、换向阀体管道口c,25、换向阀体管道口e,26、换向阀体管道口f ,27、换向阀体管道口d ,28、换向阀挡板,29、阀芯出油通道,30、阀体出油通道,31、换向阀体出油通道a,32、换向盖板出油通道a,33、通道a,34、通道b,35、通道c,36、通道d,37、左支撑缸,38、左支撑臂,39左伸缩缸,40、控制短节,41、右伸缩缸,42、右支撑臂,43、右伸缩缸,44、管线a,45、管线b,46、管线c,47、管线d,48、管线e,49、管线f,50、管线g,51、管线h,52、牵引力测量装置,53、地面液压信号发生系统,53a、管线1,53b、管线2,53c、管线3,53d、管线4。
具体实施方式
31.实施例1下面结合附图对本发明作进一步说明。
32.依照图1-9所示,一种新型井下牵引机器人液控解码和换向方法,包括地面液压信号发生系统53、液控管线、牵引机器人液控解码和换向系统、牵引力测量装置52、井下牵引机器人,地面液压信号发生系统53通过液控管线与牵引机器人液控解码和换向系统的左进油管道20、右进油管道19、换向管道12以及回油管道21相连接,牵引机器人液控解码和换向系统的管道a14、管道b13与牵引机器人支撑缸或伸缩缸的管线a44、管线b45或管线c46、管线d47连接,连续油管前端连接在牵引机器人左端引力测量装置52。牵引机器人以液压为动力源,地面液压信号发生系统53通过液压信号控制牵引机器人的启停。管线e48、管线f49、管线g50和管线h51以同样的方式连接到另一套井下牵引机器人液控解码和换向系统。
33.所述的牵引力测量装置52内部布置有拉力传感器和数据传输器等,可以通过实时监测牵引机器人的受力并实时传递给地面液压信号发生系统53,从而实时控制牵引机器人的牵引速度和牵引力的大小。
34.如图1-9所示,控制井下牵引机器人的牵引力以及牵引速度的方法,包括以下步骤:s1、地面液压信号发生系统53发出液压控制信号,启动牵引机器人;s2、牵引机器人牵引连续油管前进;s3、在牵引连续油管过程中,牵引力测量装置52实时测量牵引力大小以及井壁表面特征信息,并实时将这些信息传递给地面液压信号发生系统53;s4、地面液压信号发生系统53根据牵引力测量装置52测得的牵引力大小以及井壁表面特征信息控制井下牵引机器人以最优速度、牵引力大小牵引连续油管前进;s5、牵引机器人停止牵引连续油管前进。
35.所述的步骤s2中具体包括以下步骤:s21:牵引机器人判断连续油管的深度、拉力大小以及井壁表面特征等影响牵引机器人牵引连续油管的因素,并将这些信息传递给地面液压信号发生系统53;s22:地面液压信号发生系统53根据这些信号,调整不同液控管线压力大小和先后顺序,液压信息通过井下牵引机器人液控解码和换向系统控制牵引机器人支撑缸(37、43)、
伸缩缸(39、41)运动,从而实现牵引机器人最优牵引速度以及牵引力牵引连续油管前进。
36.所述的步骤s4中具体包括以下步骤:s41:牵引机器人根据牵引力测量装置52测量牵引力大小以及井壁特征,计算分析连续油管屈曲程度、井壁粗糙程度等结果,并将这些结果实时传递给地面液压信号发生系统53;s42:地面液压信号发生系统53根据这些信息,计算出需要给不同液压管线提供的压力大小以及压力先后顺序,然后实时控制井下牵引机器人液控解码和换向系统,从而实时控制牵引机器人的牵引速度和牵引力。
37.依照图8所示,牵引机器人由左支撑缸37、左支撑臂38、左伸缩缸39、控制短节40、右伸缩缸41、右支撑臂42、右支撑缸43以及液控管线组成。左支撑缸37、左伸缩缸39、右伸缩缸41、右支撑缸43分别对应一套井下牵引机器人液控解码和换向系统。
38.井下牵引机器人液控解码和换向系统安装于控制短节40中,控制短节40对牵引机器人支撑缸、伸缩缸进行控制,该牵引机器人的基本工作过程包括6个运动过程,7个运动状态。
39.状态a:右伸缩缸41将整个机器人向右牵引,左伸缩缸39带动左支撑缸37向右移动;状态b:左支撑臂38利用左支撑缸37完成支撑动作;状态c:右支撑臂42与右伸缩缸43收缩并向右移动;状态d:右伸缩缸41牵引整个机器人向右移动;状态e:右支撑臂42与右支撑缸43一起完成支撑动作;状态f:左支撑臂38与右伸缩缸41收缩并向右移动;状态g:重复步骤a
–
f。
40.依照图1-9所示,以井下牵引机器人液控解码和换向系统控制井下牵引机器人的牵引力为例,开始时(如图1所示),地面液压信号发生系统53管线1(图中标记53a)通过液压管线与左进油管道20连接,地面液压信号发生系统53管线2(图中标记53b)通过液压管线与右进油管道19连接,地面液压信号发生系统53管线3(图中标记53c)通过液压管线与回油管道21连接,地面液压信号发生系统53换向管线4(图中标记53d)通过液控管线与换向管道12连接,管道a14通过液控管线与管线a44连接,管道b13通过液控管线与管线b45连接。
41.首先地面液压信号发生系统53管线1(图中标记53a)提供一定大小的液压力,液压介质通过左进油管道20进入井下牵引机器人液控解码和换向系统,在液压力的作用下阀芯5、活塞6会向右运动,当阀芯右通道3与右进油通道1连通时阀芯5、活塞6停止向右运动(此时活塞6与阀芯出油通道29属于重合状态),保持管线1(图中标记53a)供压的同时,地面液压信号发生系统53管线2(图中标记53b)开始提供一定大小的液压力通过右进油管道19进入井下牵引机器人液控解码和换向系统,在管线2(图中标记53b)的液压力作用下活塞6会向左移动、阀芯5会向右移动,当达到一定液压力时,阀芯5运动到右端极限位置被挡住(如图7所示),增加管线的液压力阀芯5将不再向右移动,此时阀出油通道29与阀体出油通道30、右进油通道1连通,并且活塞6与阀芯左通道4重合,此时管线1(图中标记53a)是否供压对井下牵引机器人液控解码和换向系统不起作用,继续向管线2(图中标记53b)供压,液压介质依次通过右进油管道19、右进油通道1、阀芯右通道3、阀出油通道29、阀体出油通道30、
换向阀体出油通道a31、换向盖板出油通道32、管线a44进入到左支撑缸37左腔室,在液压力的作用下左支撑缸37的活塞向右移动,从而左支撑臂38对井壁支撑,通过向管线2(图中标记53b)提供不同大小的压力就可以给井壁提供不同大小的支撑力,从而实现牵引机器人给连续油管施加不同的拉力,地面液压信号发生系统53根据牵引力测量装置52的实时监测的信息通过实时改变管线2(图中标记53b)液压力大小即可改变牵引机器人牵引力的大小,通过换向管线4(图中标记53d)可实现支撑臂的回缩,当牵引机器人被岩石卡住时,牵引力测量装置52将信息传递给地面液压信号发生系统53,然后地面液压信号发生系统53控制左支撑臂38、右支撑臂42收回,方便牵引机器人的回收。
42.依照图1-9所示,以井下牵引机器人液控解码和换向系统控制井下牵引机器人的牵引速度为例,在前述条件下,管线2(图中标记53b)持续供压,左支撑臂38支撑井壁。此时,另一套井下牵引机器人液控解码和换向系统左进油管道20与地面液压信号发生系统53管线1(图中标记53a)通过液压管线连接,地面液压信号发生系统53管线2(图中标记53b)通过液压管线与右进油管道19连接,地面液压信号发生系统53管线3(图中标记53c)通过液压管线与回油管道21连接,地面液压信号发生系统53换向管线4(图中标记53d)通过液控管线与换向管道12连接,管道a14通过液控管线与管线c46连接,管道b13通过液控管线与管线d47连接。同理,按照前述控制牵引机器人牵引力控制方法,通过地面液压信号发生系统53向井下牵引机器人液控解码和换向系统提供液压即可实现左伸缩缸向右运动,通过改变提供液压力的大小即可实现牵引机器人牵引速度的控制,通过以上方法即可利用井下牵引机器人液控解码和换向系统采用液压控制的方式实现井下牵引机器人牵引力和牵引速度的控制,通过牵引力测量装置52实时将牵引机器人的运动信息传递给地面液压信号发生系统53,再通过地面液压信号发生系统53实时调整不同管线的液压力和施加液压的先后顺序,从而实现闭环控制牵引机器人牵引力和牵引速度。
43.实施例2本实施例结合附图,对井下牵引机器人液控解码和换向系统进行说明。
44.依照图1、图2、图3所示,该新型井下牵引机器人液控解码和换向系统最外层为阀体18和阀体端盖7,阀体18在其下端开有右进油通道1和左进油通道2,右进油通道1和左进油通道2均与阀体18腔室连通,在阀体18上端开有换向通道11和阀体出油通道30;在阀体18下端与右进油通道1和左进油通道2相连接的是右进油管道19和左进油管道20,在阀体18上端与换向通道11相连接的是换向管道12;换向阀体盖板15上开有换向盖板出油通道a32,在换向阀体盖板15上焊接着管道b13、管道a14和回油管道21,管道b13、管道a14通过液控管线与牵引机器人的支撑缸或伸缩缸的进出油管线连接。
45.阀芯端盖8安装在阀芯5左端且阀芯端盖8与小弹簧9左端固连,小弹簧9右端与活塞6固连,活塞6可在阀芯5内腔通道左右移动;阀芯5右端与大弹簧17左端固连,大弹簧17右端与阀体18内腔右端凹槽固连,阀芯5可在阀体18内腔室左右移动;在初始状态时,小弹簧9处于自然伸长状态,大弹簧17处于压缩状态,阀芯5处于阀体18内腔室最左端位置;阀芯5在其下端开有阀芯右通道3和阀芯左通道4,阀芯5在其上端开有阀芯出油通道29;在初始状态时活塞6与阀芯左通道4不完全重合,阀芯左通道4左端仍有部分与与活塞6左端腔室连通,阀芯左通道4与阀体左进油通道2也不完全重合,阀芯左通道4与阀体左进油通道2左端有小部分连通,阀芯出油通道29与阀芯右通道3连通,阀芯出油通道29与阀体出油通道30完全错
开。
46.作为选择,所述的小弹簧9、大弹簧17的劲度系数、直径是根据活塞6两端、阀芯5两端、换向阀体10两端所受液压力的大小计算之后而进行选择的,确保能够可靠地实现解码功能。
47.上述方案中,阀体18上腔室的换向阀体10、换向弹簧16、换向阀体盖板15以及换向通道组成的换向装置,可利用阀体、阀芯在实现液控解码以后的基础上从而实现液控换向功能,减小了液控换向阀的体积,节约了井下空间。
48.作为选择,所述的液控换向阀体10内的管道应该分为左右两组,右组管道处于连通时处于未换向状态,左组管道处于连通时处于换向状态,为了便于加工,换向阀体可采用分段拼接制造。
49.图4所示,第一组换向阀体管道口包括换向阀体管道口d27、换向阀体管道口e25和换向阀体管道口f26,换向阀体管道口e25和换向阀体管道口f26通过换向阀体内的通道a34连通;换向阀体处于初始状态时,换向阀体10处于上腔室最左端,换向阀体管道口d27通过换向阀体10内部的通道b33上端与管道a14连通,下端与阀体出油通道30连通,换向阀体管道口e25上端与回油管道21连通,换向阀体管道口f26下端与管道b13连通。所述第二组换向阀体管道口包括换向阀体管道口a22(包括换向阀管道口上端22a及换相阀体管道口a下端22b,换向阀体管道口a上、下端(22a、22b)在换向阀体上下平面位置相同,之间不联通)、换向阀体管道口b23和换向阀体管道口c24,换向阀体管道口a上端22a和换向阀体管道口b23通过换向阀体内的通道c35连通;换向阀体管道口a下端22b和换向阀体管道口c24通过换向阀体内的通道d36连通;换向阀体处于换向工作状态时,在换向通道11的液压力作用下换向阀体10向右移动,换向弹簧16处于压缩状态,换向阀体管道口a上端22a与管道a14连通,换向阀体管道口a下端22b与与阀体出油通道30连通,换向阀体管道口b23与回油管道21连通,换向阀体管道口c24与管道b13连通,换向阀体10右端被换向阀挡板28限位。
50.依照图5、图6所示,阀体18上端与换向阀体盖板15形成的内腔中安装着换向阀体10、换向弹簧16、换向阀挡板28;换向阀体10右端与换向弹簧16左端固连,换向弹簧16右端与阀体18上腔室右端固连;换向通道11右端与阀体18上腔室连通;换向阀挡板28安装在阀体18上腔室右端且两个换向阀挡板28成对称布置;在换向阀体上表面开有换向阀体管道口a22、换向阀体管道口b23、换向阀体管道口c24、换向阀体管道口e25、换向阀体管道口f26、换向阀体管道口d27;换向阀体管道口a22、换向阀体管道口b23、换向阀体管道口c24、换向阀体管道口e25、换向阀体管道口f26、换向阀体管道口d27为换向阀体10通道上表面的六个出口;换向阀体10处于原始状态时,换向阀体10处于阀体18上腔室最左端,换向阀体管道口d27与管道a14连通,换向阀体管道口d27下端与阀体出油通道30连通,换向阀体管道口e25与回油管道21连通,换向阀体管道口f26与管道b13连通;当换向阀处于换向工作状态时,在换向通道11的液压力作用下换向阀体10会向右移动,换向弹簧16处于压缩状态,此时换向阀体管道口a22与管道a14连通,换向阀体管道口b23与回油管道21连通,换向阀体管道口c24与管道b13连通,换向阀体10右端被换向阀挡板28挡住,换向阀体管道口a22正下方的管口与阀体出油通道30连通。
51.依照图7所示,当新型井下牵引机器人液控解码和换向系统处于解码最终状态时,此时阀芯5处于阀体18内腔右端位置,大弹簧17、小弹簧9都处于压缩状态,活塞6与阀芯左
通道4处于完全重合状态使得阀芯左通道4被堵住,阀芯出油通道29与阀体出油通道30连通,阀芯右通道3与右进油通道1连通,通过右进油管道19向阀芯5和活塞6内腔加液压介质,液压介质会通过阀芯出油通道29、阀体出油通道30然后再通过换向阀体10流入到井下牵引机器人支撑缸或伸缩缸中进行井下牵引机器人的运动控制。实现不同挡位的控制原理是:当液压介质为某一压力范围时,井下牵引机器人支撑缸或伸缩缸会进入到某一挡位,此时会给井壁施加此挡位下的支撑力,伸缩缸也会给连续油管此挡位下的拖拽力;当液压介质为另一压力范围时,井下牵引机器人液控解码和换向系统会进入到另一挡位,通过施加不同压力的液压介质来实现井下牵引机器人支撑缸、伸缩缸不同挡位运动控制。
52.本井下牵引机器人液控解码和换向系统以牵引机器人支撑缸、伸缩缸某一挡位解码、换向过程为例,首先通过左进油管道20向阀体左进油通道2加液压,液压介质会通过阀芯左通道4进入到活塞6左端腔室内,阀芯5端盖中间为空心,在液压力的作用下阀芯5会向右移动,活塞6在液压力的作用下也会适当向右运动,当阀芯5运动到某一定位置时在大弹簧17的弹簧力的作用下阀芯5会停止运动,活塞6会也在小弹簧9的作用力下停止运动,阀芯5在此位置时阀芯右通道3刚刚开始连通,此时阀芯出油通道29与阀体出油通道30仍然交错状态,保持向左进油管道20施加液压,阀芯5和活塞6将保持不动,然后向右进油管道19施加液压力,由于阀芯出油通道29不通,所以活塞6右端腔室将处于憋压状态,当压力到达一定时活塞6会向左移动由于阀芯左通道4仍处于保压状态,活塞6会向左移动,活塞6左端的腔室液压介质将进一步压缩,阀芯5会再次向右端移动,当阀芯5被阀体18内腔室右端台阶挡住后停止运动,此时阀芯左通道4将会被活塞6挡住,活塞6左端腔室处于保压状态,活塞6将不再左右移动,此时阀芯5运动到右端极限位置,右进油管道19、右进油通道1、与阀芯右通道3完全连通,阀芯出油通道29与阀体出油通道30完全连通,继续向右进油管道19施加液压,液压介质会通过阀芯出油通道29,阀体出油通道30进入换向阀体10,此时若不进行换向控制,液压介质则会直接通过阀芯出油通道29、阀体出油通道30、换向阀体出油通道a31、换向盖板出油通道a32和管道a14从而直接对井下牵引机器人支撑缸或伸缩缸进行挡位控制,施加不同级别的液压力即能实现井下牵引机器人支撑缸或伸缩缸分别对井壁以及连续油管施加不同的支撑力以及牵引力;若需要在解码基础上进行换向控制,则向换向管道12施加液压力,在换向通道11的液压力作用下换向阀体10会向右移动,换向弹簧16处于压缩状态,此时换向阀体管道口a22与管道a14连通,换向阀体管道口b23与回油管道21连通换向阀体管道口c24与管道b13连通,换向阀体10右端被换向阀挡板28挡住,换向阀体管道口a22正下方的管口与阀体出油通道30连通,此时从阀芯出油通道29,阀体出油通道30流出的液压介质会从管道b13流入到井下牵引机器人支撑缸或伸缩缸,然后经过换向阀体管道口a22、换向阀体管道口b23流回到回油管道21从而实现井下牵引机器人支撑缸或伸缩缸换向控制,从而实现井下牵引机器人支撑机构以及伸缩机构的复位。
53.以上所述仅为本发明示意性的具体实施方式,并非用以限定本发明的范围。任何本领域的技术人员,在不脱离本发明的构思和原则的前提下所作出的等同变化与修改,均应属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。