1.本发明属于激光雷达领域,具体涉及一种相干探测激光测风雷达的平衡探测装置。
背景技术:
2.大气风场信息是大气的一项重要参数,在气候气象学研究、数值天气预报、环境监测以及军事航空等方面都有非常重要的作用。测量大气风场主要有直接探测和相干探测,其中相干探测是利用气溶胶后向散射信号进行外差探测,是一种快速低空风场探测手段,具有高灵敏度和高精度等优点。
3.相干探测的基本原理为:激光发射到大气后与气溶胶发生弹性散射,该散射光信号携带有大气风场引起的多普勒频移信息和本振光信号进行拍频,通过对拍频信号进行信号处理,提取多普勒频移,从而反演三维风场信息。由于接收的散射信号强度极其微弱,再加之信号光存在退偏的情况导致这部分退偏信号无法参加拍频,降低了相干效率,探测得到的拍频信号信噪比更低。
4.专利201410683013.3公开的自由空间干涉光路装置,分束和合束均采用偏振不相关的自相干方式,这要求入射光必须为偏振光,否则不同偏振不能产生相干信号。且采用固定的平行平板修正两个平衡探测臂相位差至180
°
,针对近红外波段需要加工精度至10nm,不易实现。
技术实现要素:
5.本发明的目的在于克服上述现有技术的不足,提供一种相干探测激光测风雷达的平衡探测装置,采用偏振分束再转换至同一偏振态后均分合束进行平衡探测的方式,解决了退偏信号无法参与相干的难题,以及平衡探测双臂光路相位不易匹配的问题,利用气溶胶散射非退偏和退偏的两部分信号,提高了探测的信噪比、增加了探测距离,提高探测信号的信噪比。
6.本发明的基本原理是通过偏振分束器把退偏信号光分离出来,然后改变非退偏光偏振方向再与本振光拍频。通过电光晶体改变平衡探测双臂光路之间的相位差,保证最大相干效率。
7.本发明的技术解决方案如下:
8.一种相干探测激光测风雷达平衡探测装置,其特点在于,包括:
9.偏振分束模块,用于将信号光分为两束,即s偏振信号光和p偏振信号光;
10.合束与反射模块,用于将本振光与其中一束偏振信号光合束,形成第一偏振信号光;
11.调制晶体模块,用于调制另一束偏振信号光,形成第二偏振信号光,且第二偏振信号光和第一偏振信号光的相位差为360
°
或360
°
整数倍;
12.偏振转换模块,用于将第一偏振信号或第二偏振信号转变为与另一偏振信号光的
偏振相同的偏振信号光;
13.能量分束模块,用于接收两束偏振相同的偏振信号光,并均分成振幅、相位和偏振相同、且传播方向互相垂直的两束偏振信号光,即第三偏振信号光和第四偏振信号光。
14.进一步,还包括:
15.调制晶体与反射模块,用于改变第三偏振信号光的传播方向,使其与第四偏振信号光的传播方向平行,且确保第三偏振信号光和第四偏振信号光的相位差恒定为180
°
或180
°
整数倍。
16.或者,还包括:
17.聚焦与光电探测模块,用于第三偏振信号光和第四偏振信号光进行聚焦与拍频处理,并传输至数据采集与处理器模块,产生增强的多普勒信号频率谱。
18.优选的,所述偏振分束模块为偏振分束棱镜。
19.优选的,所述合束与反射模块包括合束器和高反镜,所述合束器为平板合束器或立方体合束器。
20.优选的,所述能量分束模块为分光比为1∶1的能量分束棱镜。
21.与现有技术相比,发明的有益效果在于:
22.(1)通过分离、调整退偏信号光的偏振态、相位差与和本振光的偏振方向相位差匹配,使得信号光退偏部分参与相干平衡探测,增强相干信号强度,提高探测信噪比。
23.(2)通过电光延迟晶体解决两个平衡探测臂之间的相位差精确调节问题,以及通过能量分束棱镜实现平衡探测双臂能量均分,最终实现了平衡探测最优化。
24.(3)利用了非退偏信号参与拍频,提高了相干效率,增加了探测信噪比,探测距离增加20%。
25.(4)与光的偏振有关,可用于各种相干探测系统中,且平衡探测双臂光路相位差易于调整。
附图说明
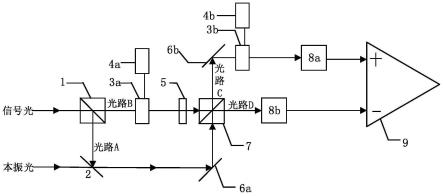
26.图1是本发明相干探测激光测风雷达平衡探测装置实施例1示意图;
27.图2是图1是本发明相干探测激光测风雷达平衡探测装置实施例2的示意图。
28.图中:1偏振分束棱镜,2合束器,3a第一电光调制晶体,3b第二电光调制晶体,4a第一电光驱动器,4b第二电光驱动器,5a第一半波片,5b第二半波片,6a第一高反镜,6b第二高反镜,7能量分束棱镜,8a第一聚焦透镜,8b第二聚焦透镜,9平衡探测器,10a第一放大光电探测器,10b第二放大光电探测器,11数字采集与处理器,12相位延迟晶体。
具体实施方式
29.下面结合实例和附图对本发明作进一步说明,但不应以此限制本发明的保护范围。
30.实施例1
31.参阅图1,图1是本发明相干探测激光测风雷达平衡探测装置实施例1示意图,如图可知,一种相干探测激光测风雷达平衡探测装置,包括偏振分束棱镜1,合束器2,第一电光调制晶体3a,第二电光调制晶体3b,第一电光驱动器4a,第二电光驱动器4b,第一半波片5,
第一高反镜6a,第二高反镜6b,能量分束棱镜7,第一聚焦透镜8a,第二聚焦透镜8和平衡探测器9。
32.信号光通过偏振分束棱镜1后被分成s偏振的信号光和p偏振的信号光,并分别进入光路a和光路b。其中s偏振的信号光经过合束器2后,光的传播方向折转90
°
,同时具有s偏振的本振光透过合束器2与s偏振的信号光合束并经过第一高反镜6a反射后垂直入射到能量分束棱镜7上;p偏振的信号光首先经过第一电光调制晶体3a,调节第一电光驱动器4a的电压,使得光路a和光路b的相位差360的整数倍并恒定,保证光路a、b良好的相干性;接着经过相位调制的p偏振信号光经过第一半波片5a(半波片的标记方向与p偏振方向夹角为45
°
)后变成s偏振的信号光垂直入射到能量分束棱镜7。两束光被能量分束棱镜7分成振幅、相位和偏振均相同的两束光,分别进入光路c和光路d。光路c中的光束经过与第一高反镜6a平行的第二高反镜6b后,光束的传播方向与光路d中平行,接着经过第二电光调制晶体3b,调节第二电光驱动器4b的电压使得光路c、d相位差180
°
的奇数倍并恒定,然后通过第一聚焦透镜8a,输入到平衡探测器9的正极;光路d中的光束直接透过第二聚焦透镜8b后,输入到平衡探测器9的负极,最后完成平衡探测从而得到信噪比增强的平衡探测信号。
33.下面是一个实施例采用的主要器件的参数,适合但不仅限于如下参数:
34.所述的偏振分光棱镜1边长可以取为25mm,由两个熔融石英棱镜构成,适合常用的激光波长。
35.所述的合束器2是反射率99%,透射率1%,衬底为红外熔融石英的合束器。
36.所述的第一、第二电光调制晶体3a、3b为kdp晶体。
37.所述的第一电光驱动器4a使得光路a、b相位差360
°
或者360
°
的整数倍并恒定。
38.所述的第一半波片5a由石英半波片构成,能够产生λ/2光程差。
39.所述的高反镜6a、6b表面镀有介质膜,平均反射率大于99%。
40.所述的能量分束棱镜7的分光比尽量接近1:1。
41.所述的聚焦透镜8a、8b为平凸透镜,以适应不同的工作波长。
42.所述的第二电光驱动器4b使得光路c、d相位差180
°
的奇数倍并恒定。
43.所述的平衡探测器9是ingaas平衡探测器,一般带宽100mhz以上。
44.利用上述相干探测激光测风雷达数字平衡探测装置进行探测的具体过程如下:
45.信号光垂直入射到偏振分束棱镜1后,被分成s偏振光和p偏振光,并分别进入光路a和光路b。s偏振的信号光进入光路a后首先经过具有高反射率的合束器2反射,同时具有s偏振态的本振光透过合束器2后与s偏振的信号光合束并经过第一高反镜6a后垂直入射到能量分束棱镜7上;p偏振的信号光进入光路b依次经过第一电光调制晶体3a、半波片5并垂直入射到能量分束棱镜7上。其中调节第一电光驱动器3b使得光路a、b的相位差360的整数倍并恒定;半波片5改变p偏振的信号光的偏振态为s偏振。
46.能量分束棱镜7把两束光分成振幅、相位和偏振均相同的两束光,分别进入光路c和光路d。光路c中的光束经过第二高反镜6b后,光的传播方向与光路d平行,之后依次经过第二电光调制晶体3b、第一聚焦透镜8a后,输入到平衡探测器9的正极,其中调节第二电光驱动器4b使得光路c、d的相位差为180
°
的奇数倍并恒定;光路d中的光束直接通过第二聚焦透镜8b,输入到平衡探测器9的负极,最后完成平衡探测从而得到平衡探测信号。
47.实施例2
48.参阅图2,图2是本发明相干探测激光测风雷达平衡探测装置实施例2示意图,如图可知,一种相干探测激光测风雷达平衡探测装置,包括偏振分束棱镜1,相位延迟晶体12,电光驱动器4a,合束器2,半波片5b,高反镜6,能量分束棱镜7,第一聚焦透镜8a,第二聚焦透镜8b,第一放大光电探测器10a,第二放大光电探测器10b,数字采集与处理器11。上述元器件的连接关系如下:
49.信号光垂直入射所述的偏振分束棱镜1,出射的光分成p偏振的信号光和s偏振的信号光,分别进入光路a和光路b。p偏振的信号光经过所述的电光驱动器4a控制的相位延迟晶体12后垂直入射所述的能量分束棱镜7构成光路a。s偏振的信号光经过所述的合束器2反射后,光的传播方向改变90
°
,同时,与信号光入射方向平行且具有s偏振的本振光透过所述的合束器2和s偏振的信号光合束后垂直经过所述的半波片5b(半波片的标记方向与信号的s偏振光的夹角为45度),将两者的s偏振态都转换为p偏振态,然后经过所述的45度安装的高反镜6折转90度,垂直入射到所述的能量分束棱镜7构成光路b。调节所述的电光驱动器4a使得光路a、b相位差360
°
或者其整数倍,保证良好的相干性。从所述的能量分束棱镜7出射的两束光的振幅和偏振方向均相同,两束光分别进入光路c和光路d进行单独探测。光路c中的光信号经过所述的第一聚焦透镜8a聚焦至第一放大光电探测器10a变为拍频信号;同时,光路d中的光束也经过所述的第二聚焦透镜8b聚焦至第二放大光电探测器10b变为拍频信号;接着两路电信号通过导线同时输入到所述的数据采集与处理器11中直接得到增强的多普勒信号频率谱。
50.下面是一个实施例采用的主要器件的参数参考值,但不仅限于如下参数:
51.所述的偏振分光棱镜1边长可以取为25mm,由两个熔融石英棱镜构成,适合常用的激光波长。
52.所述的相位延迟晶体12使得光路a、b相位差360
°
或者其整数倍。
53.所述的合束器2是反射率99%,透射率1%,衬底为红外熔融石英的合束器。
54.所述的半波片5b由石英半波片构成,适合绝大部分波长。
55.所述的高反镜6表面镀有介质膜,平均反射率大于99%。
56.所述的能量分束棱镜7的分光比尽量接近1∶1。
57.所述的聚焦透镜8a、8b为聚焦透镜组,以适应不同的工作波长。
58.所述的放大光电探测器10a、10b为ingaas放大光电探测器,一般带宽100mhz以上。
59.所述的数据采集与处理器11包括的ad采集卡采样速率为200ms/s及以上。
60.利用上述相干探测激光测风雷达数字平衡探测装置进行探测的具体操作过程如下:
61.信号光垂直入射到偏振分束棱镜1上,信号光被分为s偏振光和p偏振光,s偏振的信号光透过偏振分束棱镜1进入光路a,通过相位延迟晶体12垂直入射到能力分束棱镜;p偏振的信号光反射进入光路b,经过合束器2反射后,光的传播方向改变90
°
,同时具有s偏振的本振光透过合束器2与s偏振光的信号光合束经过半波片5b变为p偏振态,经过高反镜6反射90度垂直入射垂直入射到能量分束棱镜7。在此过程中,通过调节电光驱动器4a的电压可以使得光路a和光路b的相位差360
°
或者其整数倍。光路a和光路b中的信号光经过能量分束棱镜7后得到两束相干信号光分别进入光路c和光路d,在每个光路上每束光依次经过聚焦透镜8、放大光电探测器10,数据采集与处理器11后,得到多普勒频率信号。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
