1.本实用新型涉及一种材料光谱测试试验机,特别涉及一种模块集成的柔性材料拉伸过程中原位光谱测试试验机。
背景技术:
2.柔性材料具有轻薄、可卷曲折叠、可延展、低成本大面积加工等优势,在信息、能源、医疗、国防等领域表现出巨大的应用前景。
3.光谱在材料性能测试中发挥重要的作用,利用各种化学物质所具有的反射、荧光或吸收光谱谱系的特征,来确定其性质、结构或含量,具有灵敏、快速、简便的特点。
4.目前,柔性材料的测试方法大多为单机的方式,很难实现柔性材料力学、光学等信息的综合性研究,且现有的柔性材料原位测试设备大多具有非模块化、一样一机的局限。因此,研制一种模块化、通用的柔性材料力学、光学原位测量系统十分重要。
技术实现要素:
5.为了解决上述技术问题,本实用新型提供一种模块集成的柔性材料拉伸过程中原位光谱测试试验机,包括转角仪模块、拉伸模块、光谱检测模块和控制器,所述的转角仪模块包括光源和光电探测器,所述的拉伸模块设在光源和光电探测器下方,光源和光电探测器分别朝向拉伸模块上夹持的柔性材料;光谱检测模块设在拉伸模块的下方;所述的转角仪模块、拉伸模块、光谱检测模块分别与控制器相连。
6.进一步的,所述的转角仪模块包括转角仪、第一旋臂和第二悬臂,转角仪竖直设置,第一旋臂和第二悬臂分别与转角仪的两个转盘相连,转角仪内置的驱动电机分别驱动两个转盘旋转,进而带动第一旋臂和第二悬臂转动相应的角度;第一旋臂上设有光源和凸透镜,光源设在凸透镜的上方,将激发光透过凸透镜照射在柔性材料上;第二旋臂上设有光电探测器和凸透镜,光电探测器设在凸透镜的上方,光电探测器经过光电转换及信号放大器与控制器相连,收集柔性材料的反射光谱。
7.进一步的,所述的拉伸模块包括双臂电缸、第一力传感器、第二力传感器、第一夹具和第二夹具,所述的双臂电缸水平设置,第一力传感器和第二力传感器的一端分别通过力传感器固定架与双臂电缸的两个滑台相连;第一力传感器和第二力传感器的另一端分别与第一夹具和第二夹具相连,构成左右拉伸臂;柔性材料的两端通过第一夹具和第二夹具夹持固定;双臂电缸与控制器相连,由控制器控制其两个滑台以一定的速度相向或相反滑动一定的距离。
8.进一步的,所述的第一夹具和第二夹具分别包括上夹具和下夹具,上夹具和下夹具通过螺栓连接,将柔性材料夹持固定。
9.进一步的,所述的双臂电缸的一端还设有手动旋钮。
10.进一步的,所述的光谱检测模块包括物镜、反射镜、滤光片、凸透镜、半反半透镜、光谱仪和电荷耦合器件ccd,所述的物镜设在柔性材料的正下方,用来收集柔性材料的荧光
光谱和吸收光谱;反射镜倾斜设在物镜的正下方,滤光片、凸透镜、半反半透镜依次设在反射镜的反射光路上,光谱仪设在半反半透镜的透射光路上,电荷耦合器件ccd设在半反半透镜的反射光路上,光谱仪和电荷耦合器件ccd分别与控制器相连。
11.本实用新型的工作原理:
12.首先测量柔性材料的长度,根据柔性材料的长度设定第一夹具和第二夹具之间的初始距离,将柔性材料左右两端分别夹在第一夹具和第二夹具之间;
13.然后调整拉伸模块的位置,由控制器控制转角仪的驱动电机分别带动两个转盘旋转,进而调整第一旋臂和第二悬臂的角度,使第一旋臂上的光源的入射光照射在柔性材料的中心位置;
14.最后设定拉伸测试的模式、速度、距离,由控制器控制双臂电缸带动第一力传感器和第二力传感器向相反方向移动,拉伸柔性材料,第一力传感器和第二力传感器对拉伸过程中柔性材料受到的拉力进行测量,并通过控制器获得拉力值、拉伸率等相关力学参数;在测量力学参数的过程中,根据测量原位光谱类型设定第一旋臂的入射角度和第二旋臂的接收角度,由第一旋臂上的光源照射被拉伸的柔性材料,由第二旋臂上的光电探测器探测被拉伸的柔性材料的反射光强,第一旋臂与竖直方向的夹角α和第二旋臂与竖直方向的夹角β相同;当第一旋臂与竖直方向夹角α为0
°
时,保证入射光垂直柔性材料入射,由拉伸模块下方的光谱检测模块测量柔性材料的吸收光谱;当第一旋臂上的光源为单色光源时,根据柔性材料的性质选择合适的单色光源,保持第一旋臂与柔性材料的夹角接近直角,由拉伸模块下方的光谱检测模块测量柔性材料的荧光光谱。
15.拉伸过程中同步进行原位光谱测量,将拉伸时的力学信息和光谱信息的变化直接关联,实现柔性材料的原位光谱测试。
16.本实用新型的有益效果:
17.本实用新型所述的一种模块集成的柔性材料拉伸过程中原位光谱测试试验机,通过双向拉伸可以精确找到柔性材料受力均匀的中心点,克服了受力不均匀导致光谱异常变化的影响,提高了测试的精准性;通过设计夹具,以及左右拉伸臂安装位置及机械结构关于拉伸中心镜像对称,可以使柔性材料的受力方向与力传感器的中心平面保持一致,且关于拉伸中心对称,提高了力测量的精准性;通过设计力传感器固定架,可以固定双臂电缸和力传感器,以防止在拉伸过程中力传感器发生位置移动,提高了力测量的稳定性;本实用新型将激发光路固定在转角仪可旋转的旋臂上,通过旋臂的旋转实现激发光路方向的调整,从而满足不同的采集光谱的要求。
18.本实用新型通过设计独立的光学测试模块、拉伸及力测量模块、控制模块,各个模块可以独立使用,和其他仪器进行集成,可以提高仪器的利用效率;转角仪模块和光谱检测模块进行柔性材料光谱学信息的检测,拉伸模块进行柔性材料的拉伸动作及所受力学信息的测量,控制器发出电机控制指令及完成光谱信息和力学信息数据的采集和处理,每个模块可以独立执行,同时获取数据,克服了传统柔性材料检测先拉伸后测量的局限。
附图说明
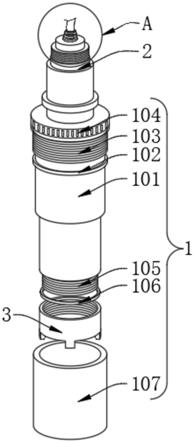
19.图1为本实用新型整体结构示意图;
20.图2为本实用新型拉伸模块结构示意图;
21.图3为本实用新型拉伸模块一侧拉伸臂结构示意图;
22.1、转角仪模块,2、拉伸模块,3、光谱检测模块,4、控制器,5、柔性材料,6、上位机;
23.101、转角仪,102、第一旋臂,103、第二悬臂,104、光源,105、第一凸透镜,106、光电探测器,107、第二凸透镜,108、信号放大器;
24.201、双臂电缸,202、第一力传感器,203、第二力传感器,204、第一夹具,205、第二夹具,206、力传感器固定架,207、滑台,208、上夹具,209、下夹具,210、手动旋钮;
25.301、物镜,302、反射镜,303、滤光片,304、第三凸透镜,305、半反半透镜,306、光谱仪,307、电荷耦合器件ccd。
具体实施方式
26.请参阅图1-3所示:
27.本实用新型提供一种模块集成的柔性材料拉伸过程中原位光谱测试试验机,包括:
28.转角仪模块1,所述的转角仪模块的功能包括激发光路的角度调整和反射光强的测量;
29.拉伸模块2,所述的拉伸模块执行柔性材料的拉伸动作,同时收集柔性材料拉伸过程中的力学参数,包括拉伸率、拉伸力等;
30.光谱检测模块3,所述的光谱检测模块执行柔性材料的荧光光谱和吸收光谱的检测;
31.控制器4,所述的控制器包括微处理器及必要电路元器件,用于发送控制命令,并实现数据的采集和处理;
32.所述的转角仪模块1包括光源104和光电探测器106,所述的拉伸模块2设在光源104和光电探测器106的下方,光源104和光电探测器106分别朝向拉伸模块2上夹持的柔性材料5;光谱检测模块3设在拉伸模块2的下方;所述的转角仪模块1、拉伸模块2、光谱检测模块3分别与控制器4相连,控制器与上位机6相连。
33.所述的转角仪模块1包括转角仪101、第一旋臂102和第二悬臂103,转角仪101竖直设置,第一旋臂102和第二悬臂103分别与转角仪101的两个转盘相连,转角仪101内置的驱动电机分别驱动两个转盘旋转,进而带动第一旋臂102和第二悬臂103转动相应的角度;第一旋臂102设有光源104和第一凸透镜105,光源104设在第一凸透镜105的上方,将激发光照射在柔性材料5上;第二旋臂103上设有光电探测器106和第二凸透镜107,光电探测器106设在第二凸透镜107的上方,光电探测器106经过光电转换及信号放大器108与控制器4相连,收集柔性材料的反射光谱。
34.所述的拉伸模块2包括双臂电缸201、第一力传感器202、第二力传感器203、第一夹具204和第二夹具205,所述的双臂电缸201水平设置,第一力传感器202和第二力传感器203的一端分别通过力传感器固定架206与双臂电缸201的两个滑台207相连;第一力传感器202和第二力传感器203的另一端分别与第一夹具204和第二夹具205相连,构成左右拉伸臂,左右拉伸臂关于拉伸中心镜像对称;柔性材料5的两端通过第一夹具204和第二夹具205夹持固定;双臂电缸201与控制器4相连,由控制器4控制其两个滑台207以一定的速度相向或相反滑动一定的距离。
35.所述的第一夹具204和第二夹具205分别包括上夹具208和下夹具209,上夹具208和下夹具209通过螺栓连接,将柔性材料5夹持固定。
36.所述的双臂电缸201的一端还设有手动旋钮210。双臂电缸201由内置的步进电机通过履带带动双向丝杆实现两个滑台207双向位移动作,手动旋钮210可直接旋转带动双向丝杆实现两个滑台207双向位移动作。
37.所述的光谱检测模块3包括物镜301、反射镜302、滤光片303、第三凸透镜304、半反半透镜305、光谱仪306和电荷耦合器件ccd307,所述的物镜301设在柔性材料5的正下方,用来收集柔性材料5的荧光光谱和吸收光谱;反射镜302倾斜设在物镜的正下方,滤光片303、第三凸透镜304、半反半透镜305依次设在反射镜302的反射光路上,光谱仪306设在半反半透镜305的透射光路上,电荷耦合器件ccd307设在半反半透镜305的反射光路上,光谱仪306和电荷耦合器件ccd307分别与控制器4相连。
38.本实用新型的工作原理:
39.首先测量柔性材料5的长度,根据柔性材料5的长度设定第一夹具204和第二夹具205之间的初始距离,将柔性材料5左右两端分别夹在第一夹具204和第二夹具205之间;
40.然后调整拉伸模块2的位置,由控制器4控制转角仪101的驱动电机分别带动两个转盘旋转,进而调整第一旋臂102和第二悬臂103的角度,使第一旋臂102上的光源104的入射光照射在柔性材料5的中心位置;
41.最后设定拉伸测试的模式、速度、距离,由控制器4控制双臂电缸201带动第一力传感器202和第二力传感器203向相反方向移动,拉伸柔性材料5,第一力传感器202和第二力传感器203对拉伸过程中柔性材料5受到的拉力进行测量,并通过控制器4获得拉力值、拉伸率等相关力学参数;在测量力学参数的过程中,根据测量原位光谱类型设定第一旋臂102的入射角度和第二旋臂103的接收角度,由第一旋臂102上的光源104照射被拉伸的柔性材料5,由第二旋臂103上的光电探测器106探测被拉伸的柔性材料5的反射光强,第一旋臂与竖直方向的夹角α和第二旋臂与竖直方向的夹角β相同;当第一旋臂102与竖直方向夹角α为0
°
时,保证入射光垂直柔性材料入射,由拉伸模块2下方的光谱检测模块3测量柔性材料的吸收光谱;当第一旋臂102上的光源为单色光源时,保持第一悬臂102与竖直方向夹角α接近90
°
,由拉伸模块2下方的光谱检测模块3测量柔性材料的荧光光谱。
42.拉伸过程中同步进行原位光谱测量,将拉伸时的力学信息和光谱信息的变化直接关联,实现柔性材料的原位光谱测试。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。