1.本发明涉及监管设备技术领域,尤其是一种近海渔政执法监管信息系统。
背景技术:
2.在休渔期内,各渔船严禁出海捕捞,同时渔业部门还会专门放养很多幼苗,补充渔业资源。然而,在实际管理中还是有很多渔民觉悟不高,常在休渔期内偷偷出海进行非法捕捞,常常通过新闻报道可以看到在休渔期内很多渔船将幼苗都偷捕上来,然后打成鱼粉非法出售,这种行为对海洋渔业资源产生了非常严重的不良影响,因为各地监管部门都在严查。但现有技术中所谓的严查大多是通过监管部分派人在渔船码头巡查,看到有渔船出港时,再对其进行制止与处罚。渔船码头里渔船数量庞大,监管人员只靠简单的巡查很难即时发现有没有渔船出海,所以经常有渔船偷偷出海。综上所述,现有技术对海洋休渔期的监管效率低,不能有效的制止休渔期非法捕捞行为。
3.目前虽然有监控设备,但是海域面积较大,现有的监控设备难以捕捉到在休渔期出海捕捞的渔船,尤其在夜间光线较差,监控设备无法获取到清晰的画面,从而难以对海域进行有效的监管。
技术实现要素:
4.为了解决上述问题,本发明提供一种近海渔政执法监管信息系统,能够对出非法出港渔船进行管理,而且能够在夜间对非法出港渔船进行追踪拍摄。
5.为了实现上述目的,本发明采用的技术方案为:
6.一种近海渔政执法监管信息系统,包括设在铁塔上的摄像机、探照灯及雷达,
7.所述摄像机及所述探照灯通过连接机构设置在所述铁塔上,且所述连接机构包括连接架及驱动板,所述连接架的一侧与所述铁塔固定连接,所述驱动板一面通过第一驱动机构与所述连接架的一面转动连接;
8.所述探照灯设于所述摄像机的两侧,且所述摄像机及所述探照灯分别通过连接盒与所述驱动板连接,所述连接盒包括盒体、连接轴及连接件,所述盒体一端与所述驱动板固定连接;所述连接轴穿设于所述盒体,且所述连接轴与所述盒体转动连接,且相邻所述盒体的连接轴固定连接;所述连接件设有两个,且所述连接件分别位于所述盒体的两侧,所述连接件一端与所述连接轴固定连接,另一端与对应的所述摄像机或所述探照灯固定连接;
9.其中一所述盒体内设有第二驱动机构,所述第二驱动机构包括驱动齿轮及第二驱动电机,所述驱动齿轮固定套设在所述连接轴上,所述第二驱动电机与所述盒体固定连接,且所述第二驱动电机与所述驱动齿轮传动连接,以同时驱动各个所述盒体的连接轴转动;
10.所述雷达通过控制器分别与所述摄像机、所述探照灯、所述第一驱动机构及所述驱动电机电连接。
11.进一步地,所述第一驱动机构包括驱动轴、蜗轮及蜗杆,所述驱动轴一端与所述连接架转动连接,另一端与所述驱动板固定连接,所述蜗轮固定套设在所述驱动轴上,所述蜗
杆与所述蜗轮传动连接,且所述蜗杆的一端转动架设在所述连接架上,另一端通过第一驱动电机驱动,以使所述蜗杆驱动所述蜗轮转动,所述第一驱动电机与所述控制器电连接。
12.进一步地,所述连接架与所述驱动板之间设有第一支撑筒及第二支撑筒,所述第一支撑筒围设在所述驱动轴外,且所述第一支撑筒一端与所述连接架固定连接,另一端通过第一支撑轴承与所述驱动板转动连接;所述第二支撑筒围设在所述第一支撑筒,且所述第二支撑筒一端与所述连接架固定连接,另一端通过第二支撑轴承与所述驱动板转动连接;所述第一支撑筒、所述第二支撑筒及所述驱动轴的圆心重合。
13.进一步地,每一所述盒体内均设有自锁机构,所述自锁机构包括自锁齿盘、固定壳、锁定件、滑动件及电磁铁,所述自锁齿盘固定套设在所述连接轴内;
14.所述固定壳设有腔体,所述固定壳一端与所述盒体固定连接,另一端设有与所述腔体连通的滑动口;
15.所述锁定件一侧设有自锁齿纹,另一侧固定设置有滑动杆,所述滑动杆远离所述锁定件的一端通过所述滑动口滑动穿设于腔体内,所述滑动件位于所述腔体内并与所述固定壳滑动连接,且所述滑动件与所述滑动杆固定连接;
16.所述腔体内设有自锁弹簧,所述自锁弹簧套设在所述滑动杆外,且所述自锁弹簧两端分别与所述滑动件及所述固定壳抵接,在所述自锁弹簧的弹力作用下,所述锁定件朝靠近所述自锁齿盘方向移动,以使所述自锁齿纹与所述自锁齿盘相互卡接;
17.所述电磁铁位于所述腔体内,且所述电磁铁与所述固定壳远离所述滑动口的一端固定连接,在所述电磁铁与控制器电连接,在所述电磁铁得电时,所述电磁铁吸附所述滑动件,所述锁定件朝远离所述自锁齿盘方向移动,以使所述自锁齿纹离开所述自锁齿盘。
18.进一步地,还包括监管平台,所述监管平台包括交换机、服务器、指挥中心及移动终端,所述交换机分别与所述摄像机、所述探照灯、所述雷达、控制器及服务器通信连接,所述服务器分别与所述指挥中心及所述移动终端通信连接。
19.进一步地,所述雷达的探测跟踪距离为行人≥1500米、车辆≥2000米、船舶≥3000米。
20.进一步地,所述探照灯的有效射程为3000米,且在2000米的范围内所述摄像机获取全彩高清画面。
21.进一步地,所述摄像机具有400万像素,且所述摄像机具有55倍光学变倍。
22.本发明的有益效果是:
23.1.第二驱动电机的作用下,驱动齿轮带动该盒体的连接轴转动,由于各个盒体的连接轴固定连接,使得所以盒体的连接轴同时转动,从而使摄像机及探照灯同时进行竖直方向的角度调节;由于摄像机及探照灯设置在驱动板上,通过第一驱动机构,驱动板能够在连接架上转动,以使摄像机及探照灯同时进行水平方向的角度调节;在第一驱动机构及第二驱动机构的作用下,实现了摄像机及探照灯以相同的角度进行拍摄照射,确保在夜间也能够获取清晰的图像。在雷达的作用下,能够对休渔期出海捕捞的渔船位置进行锁定,控制器根据雷达的信号控制第一驱动机构及第二驱动机构,使得摄像机及探照灯跟踪渔船,通过摄像机及探照灯获得清晰的视频,通过留存视频,做好日后取证。实现了对出非法出港渔船进行管理,而且能够在夜间对非法出港渔船进行追踪拍摄。
24.2.在第一驱动电机的作用下,蜗杆驱动蜗轮转动,使得蜗轮带动驱动轴转动,使得
驱动板能够在连接架上转动,从而实现了摄像机及探照灯同时进行水平方向的角度调节。由于蜗轮蜗杆的连接结构,只能通过蜗杆驱动蜗轮转动,避免驱动板随意转动,使得第一驱动电机在停止时,驱动板能够停止在当前的位置。当第二驱动电机停止时,在自锁弹簧的弹力作用下,锁定件朝靠近自锁齿盘方向移动,以使自锁齿纹与自锁齿盘相互卡接,实现将摄像机及探照灯的竖直角度锁定在当前位置;当第二驱动电机启动前,控制器控制电磁铁得电,电磁铁能够对滑动件进行吸附,锁定件朝远离自锁齿盘方向移动,以使自锁齿纹离开自锁齿盘,实现了对连接轴进行释放,第二驱动电机能够驱动连接轴转动。
25.3.在交换机的作用下,能够将摄像机、探照灯、雷达及控制器的数据发送至服务器,同时利用指挥中心及移动终端能够获取摄像机、探照灯、雷达的数据,以实现远程监控,而且通过指挥中心及移动终端能够远程对控制器发送控制指令,以控制摄像机及探照灯的照射角度。
附图说明
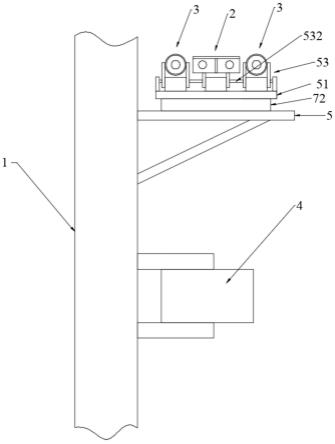
26.图1是本发明一较佳实施方式的近海渔政执法监管信息系统的结构示意图。
27.图2是本发明一较佳实施方式的近海渔政执法监管信息系统的连接架结构示意图。
28.图3是本发明一较佳实施方式的近海渔政执法监管信息系统的第一驱动机构结构示意图。
29.图4是本发明一较佳实施方式的近海渔政执法监管信息系统的自锁机构结构示意图。
30.图5是本发明一较佳实施方式的近海渔政执法监管信息系统的控制框图。
31.图中,1-铁塔,10-控制器,11-交换机,12-服务器,13-指挥中心,14-移动终端,15-雷球预警模块,151-平台接入子模块,2-摄像机,3-探照灯,4-雷达,5-连接架,51-驱动板,52-连接轴承,53-连接盒,531-盒体,532-连接轴,533-连接件,54-驱动齿轮,541-第二驱动电机,542-传动齿轮,61-驱动轴,62-蜗轮,63-蜗杆,64-第一驱动电机,71-第一支撑筒,711-第一支撑轴承,72-第二支撑筒,721-第二支撑轴承,8-自锁齿盘,81-固定壳,811-腔体,812-滑动口,82-锁定件,821-滑动杆,822-自锁齿纹,83-滑动件,84-电磁铁,85-自锁弹簧。
具体实施方式
32.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
33.需要说明的是,当组件被称为“固定于”另一个组件,它可以直接在另一个组件上或者也可以存在居中的组件。当一个组件被认为是“连接”另一个组件,它可以是直接连接到另一个组件或者可能同时存在居中组件。当一个组件被认为是“设置于”另一个组件,它可以是直接设置在另一个组件上或者可能同时存在居中组件。本文所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
34.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
35.请同时参见图1至图5,本发明一较佳实施方式的近海渔政执法监管信息系统,包括设在铁塔1上的摄像机2、探照灯3及雷达4。
36.摄像机2及探照灯3通过连接机构设置在铁塔1上,且连接机构包括连接架5及驱动板51,连接架5的一侧与铁塔1固定连接,驱动板51一面通过第一驱动机构与连接架5的一面转动连接。本实施例的连接架5及驱动板51均圆盘结构。
37.如图2和图3所示,第一驱动机构包括驱动轴61、蜗轮62及蜗杆63,驱动轴61一端与连接架5转动连接,另一端与驱动板51固定连接,蜗轮62固定套设在驱动轴61上,蜗杆63与蜗轮62传动连接,且蜗杆63的一端转动架设在连接架5上,另一端通过第一驱动电机64驱动,以使蜗杆63驱动蜗轮62转动,第一驱动电机64与控制器10电连接。
38.在第一驱动电机64的作用下,蜗杆63驱动蜗轮62转动,使得蜗轮62带动驱动轴61转动,使得驱动板51能够在连接架5上转动,从而实现了摄像机2及探照灯3同时进行水平方向的角度调节。由于蜗轮蜗杆的连接结构,只能通过蜗杆驱动蜗轮转动,避免驱动板51随意转动,使得第一驱动电机64在停止时,驱动板51能够停止在当前的位置。
39.本实施例中,连接架5与驱动板51之间设有第一支撑筒71及第二支撑筒72,第一支撑筒71围设在驱动轴61外,且第一支撑筒71一端与连接架5固定连接,另一端通过第一支撑轴承711与驱动板51转动连接;第二支撑筒72围设在第一支撑筒71,且第二支撑筒72一端与连接架5固定连接,另一端通过第二支撑轴承721与驱动板51转动连接;第一支撑筒71、第二支撑筒72及驱动轴61的圆心重合。在第一支撑筒71及第二支撑筒72的共同作用下,能够提高驱动板51的稳定性,防止驱动板51出现侧翻的情况。
40.探照灯3设于摄像机2的两侧,且摄像机2及探照灯3分别通过连接盒53与驱动板51连接,连接盒53包括盒体531、连接轴532及连接件533,盒体531一端与驱动板51固定连接;连接轴532穿设于盒体531,且连接轴532与盒体531转动连接,且相邻盒体531的连接轴532固定连接;连接件533设有两个,且连接件533分别位于盒体531的两侧,连接件533一端与连接轴532固定连接,另一端与对应的摄像机2或探照灯3固定连接。
41.本实施例中,摄像机2设有一个,探照灯3设有两个,连接轴532两端分别套设有连接轴承52,且连接轴承52与对应的盒体531侧壁滑动连接,以实现连接轴532与盒体531转动连接。驱动板51两侧分别设有支撑件511,以对两侧盒体531对应连接轴532的相对一端进行支撑。
42.其中一盒体531内设有第二驱动机构,第二驱动机构包括驱动齿轮54及第二驱动电机541,驱动齿轮54固定套设在连接轴532上,第二驱动电机541与盒体531固定连接,且第二驱动电机541与驱动齿轮54传动连接,以同时驱动各个盒体531的连接轴532转动。本实施例的第二驱动机构设置在探照灯3对应的盒体531内。本实施例中第二驱动电机541的传动轴设有减速机,减速机设有与驱动齿轮54啮合的传动齿轮542。
43.第二驱动电机541的作用下,驱动齿轮54带动该盒体531的连接轴532转动,由于各个盒体531的连接轴532固定连接,使得所以盒体531的连接轴532同时转动,从而使摄像机2
及探照灯3同时进行竖直方向的角度调节;由于摄像机2及探照灯3设置在驱动板51上,通过第一驱动机构,驱动板51能够在连接架5上转动,以使摄像机2及探照灯3同时进行水平方向的角度调节。
44.第二驱动电机541的作用下,驱动齿轮54带动该盒体531的连接轴532转动,由于各个盒体531的连接轴532固定连接,使得所以盒体531的连接轴532同时转动,从而使摄像机2及探照灯3同时进行竖直方向的角度调节;由于摄像机2及探照灯3设置在驱动板51上,通过第一驱动机构,驱动板51能够在连接架5上转动,以使摄像机2及探照灯3同时进行水平方向的角度调节。
45.在第一驱动机构及第二驱动机构的作用下,实现了摄像机2及探照灯3以相同的角度进行拍摄照射,确保在夜间也能够获取清晰的图像。且控制器10分别与摄像机2及探照灯3电连接。
46.雷达4通过控制器10分别与摄像机2、探照灯3、第一驱动机构及第二驱动电机541电连接。
47.在雷达4的作用下,能够对休渔期出海捕捞的渔船位置进行锁定,控制器10根据雷达4的信号控制第一驱动机构及第二驱动机构,使得摄像机2及探照灯3跟踪渔船,通过摄像机2及探照灯3获得清晰的视频,通过留存视频,做好日后取证。实现了对出非法出港渔船进行管理,而且能够在夜间对非法出港渔船进行追踪拍摄。
48.如图4所示,每一盒体531内均设有自锁机构,自锁机构包括自锁齿盘8、固定壳81、锁定件82、滑动件83及电磁铁84,自锁齿盘8固定套设在连接轴532内;
49.固定壳81设有腔体811,固定壳81一端与盒体531固定连接,另一端设有与腔体811连通的滑动口812。
50.锁定件82一侧设有自锁齿纹822,另一侧固定设置有滑动杆821,滑动杆821远离锁定件82的一端通过滑动口812滑动穿设于腔体811内,滑动件83位于腔体811内并与固定壳81滑动连接,且滑动件83与滑动杆821固定连接。
51.腔体811内设有自锁弹簧85,自锁弹簧85套设在滑动杆821外,且自锁弹簧85两端分别与滑动件83及固定壳81抵接,在自锁弹簧85的弹力作用下,锁定件82朝靠近自锁齿盘8方向移动,以使自锁齿纹822与自锁齿盘8相互卡接。
52.电磁铁84位于腔体811内,且电磁铁84与固定壳81远离滑动口812的一端固定连接,在电磁铁84与控制器10电连接,在电磁铁84得电时,电磁铁84吸附滑动件83,锁定件82朝远离自锁齿盘8方向移动,以使自锁齿纹822离开自锁齿盘8。
53.当第二驱动电机541停止时,在自锁弹簧85的弹力作用下,锁定件82朝靠近自锁齿盘8方向移动,以使自锁齿纹822与自锁齿盘8相互卡接,实现将摄像机2及探照灯3的竖直角度锁定在当前位置;当第二驱动电机541启动前,控制器10控制电磁铁84得电,电磁铁84能够对滑动件83进行吸附,锁定件82朝远离自锁齿盘8方向移动,以使自锁齿纹822离开自锁齿盘8,实现了对连接轴532进行释放,第二驱动电机541能够驱动连接轴532转动。
54.本实施例中,雷达4的探测跟踪距离为行人≥1500米、车辆≥2000米、船舶≥3000米。
55.而且雷达4具有下述规格:支持3d定位功能,通过客户端/ie可实现点击跟踪和放大;支持区域入侵侦测、越界侦测、进入区域侦测、离开区域侦测、徘徊侦测、人员聚集侦测、
快速移动侦测、停车侦测、物品遗留侦测、物品拿取侦测、音频异常侦测;支持智能雨刷,耐候性好,更换方便;支持三码流、roi、光学透雾、宽动态、光学防抖、电子防抖等功能;补光灯:激光补光≥3km;接口支持不低于:1路报警输入,1路报警输出,1路音频输入,1路音频输出;支持人脸图片比对功能,比对成功率不低于99%;支持防护等级不低于ip67,不低于6kv防浪涌,工作温度范围可达-45℃-70℃。
56.本实施例中,探照灯3的有效射程为3000米,且在2000米的范围内摄像机2获取全彩高清画面。
57.探照灯3还具有如下规格:重量:<10kg;额定电压:不高于dc48v;额定功率:不高于350w;追踪速度:不低于水平0-30
°
/s,垂直:0-15
°
/s,无级调速;可与视频监控、雷达等系统结合,实时跟踪照射,实时反馈设备状态;具备自动根据距离调整照度功能,确保光电设备曝光适当,获取全彩高清画面;全天时、全天候连续不低于24小时工作,中途无需关闭冷却;状态实时自检,临近使用寿命自动提醒告知,故障预警;敌我识别功能:目标为非法目标自动跟踪照射,目标为我方执法船只,自动调整角度提供适当充足的辅助照明;强光致盲功能:有效距离内可迅速对目标造成暂时性失明,限制目标行动能力;具备多通道通信:同时支持无线遥控器现场控制,tcp/ip方式远程网络通信;通信接口:rj45网络通信;防护等级不低于ip66,不受光照、灰尘、雨雪等外界环境影响。
58.本实施例中,摄像机2具有400万像素,且摄像机2具有55倍光学变倍。
59.摄像机2还具有下述规格:支持3d定位功能,通过客户端/ie可实现点击跟踪和放大;支持区域入侵侦测、越界侦测、进入区域侦测、离开区域侦测、徘徊侦测、人员聚集侦测、快速移动侦测、停车侦测、物品遗留侦测、物品拿取侦测、音频异常侦测;支持智能雨刷,耐候性好,更换方便;支持三码流、roi、光学透雾、宽动态、光学防抖、电子防抖等功能;补光灯:激光补光≥3km;接口支持不低于:1路报警输入,1路报警输出,1路音频输入,1路音频输出;支持人脸图片比对功能,比对成功率不低于99%;支持防护等级不低于ip67,不低于6kv防浪涌,工作温度范围可达-45℃-70℃。
60.如图5所示,还包括监管平台,监管平台包括交换机11、服务器12、指挥中心13及移动终端14,交换机11分别与摄像机2、探照灯3、雷达4、控制器10及服务器12通信连接,服务器12分别与指挥中心13及移动终端14通信连接。
61.在交换机11的作用下,能够将摄像机2、探照灯3、雷达4及控制器10的数据发送至服务器12,同时利用指挥中心13及移动终端14能够获取摄像机2、探照灯3、雷达4的数据,以实现远程监控,而且通过指挥中心13及移动终端14能够远程对控制器10发送控制指令,以控制摄像机2及探照灯3的照射角度。本实施例服务器12为指挥中心13及移动终端14设置有不同的权限,以使指挥中心13及移动终端14能够进行对应权限内的操控。
62.本实施例的控制器10为mcu构成的控制模组,且控制器10可接入雷球预警模块15,雷球预警模块15能够自动警戒、自动跟踪、手动控制等功能的智能安防警戒系统,可全天候、全天时实时探测监控覆盖区域。不受白天黑夜、雨雾等天气因素影响,可实时对覆盖区域探测,并实时通过控制器10对第一驱动机构及第二驱动机构进行控制,以进行跟踪照射。
63.雷球预警模块15具有平台接入子模块151,平台接入子模块151用于各大主流安防设备及第三方系统平台接入至雷球预警模块15内,以使各大主流安防设备及第三方系统平台能够控制摄像机2、探照灯3及雷达4或获取摄像机2、探照灯3及雷达4的数据。
64.本实施例的近海渔政执法监管信息系统中,摄像机2及探照灯3的控制过程为:
65.雷达4对休渔期出海捕捞的渔船位置进行锁定,控制器10根据雷达4的信号,控制器10控制电磁铁84得电,电磁铁84能够对滑动件83进行吸附,锁定件82朝远离自锁齿盘8方向移动,以使自锁齿纹822离开自锁齿盘8,然后控制第一驱动电机64转动,蜗杆63驱动蜗轮62转动,使得蜗轮62带动驱动轴61转动,以调节摄像机2及探照灯3水平方向的角度,当摄像机2及探照灯3处于合适的水平方向角度时,控制器10控制控制电磁铁84掉电,自锁弹簧85的弹力作用下,锁定件82朝靠近自锁齿盘8方向移动,以使自锁齿纹822与自锁齿盘8相互卡接,实现将摄像机2及探照灯3的竖直角度锁定在当前位置。
66.同时控制器10控制第二驱动电机541转动,驱动齿轮54带动该盒体531的连接轴532转动,连接件533驱动对应的摄像机2或探照灯3转动,以使摄像机2及探照灯3同时进行竖直方向的角度调节。
67.通过第一驱动机构及第二驱动机构,使得摄像机2及探照灯3跟踪渔船,通过摄像机2及探照灯3获得清晰的视频,通过留存视频,做好日后取证。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
