无动力输送装置及系统
1.技术领域:本发明是涉及无菌组培盒输送装置的技术领域,尤指一种无动力输送装置及系统。
背景技术:
2.已知,植物组织培养是一种将植物体的部分细胞或组织与母体分离,在适当的条件下加以培养,使它们能够生长、发育、分化与增殖的技术。原理是来自植物细胞的全能性分化能力,也就是植物体内的某一类细胞,能够独立发育并且分化成为完整的植物成体。
3.熟悉植物组织培养(业界惯称“组培”)的操作员必然知道,组培的作业流程包括以下步骤:
4.(1)备好一无菌组培盒,并将培养基(营养液)注入所述无菌组培盒;
5.(2)将所述无菌组培盒送入冷藏室,等待所述培养基凝固;
6.(3)取植物的组织切片放入所述无菌组培盒之内;
7.(4)将所述无菌组培盒封口;以及
8.(5)转移所述无菌组培盒以等待下一阶段的育苗及分装。
9.执行前述步骤(1)~(5)时,都是仰赖人工一步一步慢慢执行,并无自动化设备的辅助,从而导致组织培育(组培)的产能一直无法提升。亦或者,即使导入其它领域的自动化设备,也会因为并非专机专用,更会导致组培作业流程的滞碍不流畅,例如:输送过程中无设置挡板使输送过程暂停,不利组培作业操作;又例如:输送过程中如遇无预期静止时,没有确实的解决机制以恢复输送运作。因此,有必要设计自动化装置用于植物组培,以使整个组培流程更有效率,进而提高产能。
10.鉴于前述缘由,本案的创作人是极力加以研究创作,而终于研发完成本发明的一种无动力输送装置及系统
技术实现要素:
11.本发明的主要目的在于提供一种无动力输送装置及系统,其中,包括:一传动单元、多数个挡板、以及一控制装置。依据本发明的设计,所述传动单元的前支撑脚的长度是大于其后支撑脚的长度,使得所述传动单元呈现前端高而后端低的态势。依此设计,放置在所述传动单元之上的至少一个无菌组培盒会自然地滑动至所述传动单元的后端,从而无动力地完成所述无菌组培盒的输送。并且,所述控制装置可控制所述挡板升起以阻挡所述无菌组培盒的自然滑移。在所述无菌组培盒停止滑移的情况下,是可接着以人工或利用机械手臂对所述无菌组培盒执行一组培操作,其中所述组培操作包括:开盖、注入培养基、冷却培养基、放组织切片、喷消毒喷雾、封盖等步骤。
12.为达成上述目的,本发明提出所述无动力输送装置的一实施例,其中,包括:
13.一传动单元,包括:一设置架、设置在所述设置架之上的k个传动轮、支撑于所述设置架之前端的至少一前支撑脚、以及支撑于所述设置架后端的至少一后支撑脚,其中k为正整数;
14.一阻挡单元,包括:l个挡板以及一挡板升降机构,其中,l为正整数,且所述l个挡板等距插设在所述k个传动轮之间;以及
15.一控制装置,电性连接所述挡板升降机构;
16.其中,所述控制装置控制所述挡板升降机构以升/降至少一个所述挡板;
17.其中,所述前支撑脚的长度大于所述后支撑脚的长度,使得放置在所述传动单元之上的至少一个无菌组培盒会在所述l个挡板皆降下的情况之下自然地滑移至所述传动单元的后端,从而无动力地完成所述无菌组培盒的输送。
18.在一实施例中,其中,所述传感器为选自于由旋转式光学编码器、霍尔效应式转速传感器和角度传感器所组成群组之中的任一者。
19.在一实施例中,其中,所述传动轮是整合有耦接所述控制装置的一可挠式压力感测片(flexible pressure sensor),使所述控制装置自所述可挠式压力感测片接收一压力感测信号,从而借由所述压力感测信号判断所述无菌组培盒是否位于所述传动轮之上。
20.在一可行实施例中,其中,前述本发明的无动力输送装置是更包括:
21.j个驱动马达,其中,各所述驱动马达是连接一个所述传动轮的一主轴,且j为正整数;以及
22.k个传感器,其中,各所述传感器是连接一个所述传动轮的所述主轴,用以感测所述传动轮的一转动资讯,且所述转动资讯包括转动距离;
23.其中,在所述挡板升降机构降下阻挡一个所述无菌组培盒自然滑移的一个所述挡板之后,所述控制装置借由所述转动距离判断位于所述无菌组培盒下方的至少一个所述传动轮是否转动,从而在前述的传动轮未转动的情况下,控制所述驱动马达带动所述传动轮转动。
24.在一实施例中,其中,所述驱动马达为选自于由步进马达、伺服马达器和无刷直流(bldc)马达所组成群组之中的任一者。
25.在另一可行实施例中,其中,前述本发明的无动力输送装置是更包括:
26.l个机械手臂,等距地设置在所述设置架的一侧,且电性连接所述控制装置;
27.l个冷却装置,等距地设置在所述设置架的上方处,且电性连接所述控制装置;以及
28.l个消毒喷雾装置,等距地设置在所述设置架的上方处,且电性连接所述控制装置;
29.其中,在一个所述无菌组培盒受到一个所述挡板的阻挡而停止自然滑移的情况下,所述控制装置控制一个所述机械手臂、一个所述冷却装置以及一个所述消毒喷雾装置从而对所述无菌组培盒执行一组培操作。
30.在一实施例中,其中,所述组培操作包括以下步骤:
31.(1)开启所述无菌组培盒的一密封盖;
32.(2)将一培养基注入所述无菌组培盒;
33.(3)冷却所述培养基以使其凝固;
34.(4)取一植物组织切片放入所述无菌组培盒之内;
35.(5)对所述无菌组培盒内部进行喷雾消毒;以及
36.(6)取所述密封盖对所述无菌组培盒封口。
37.进一步地,本发明同时提出一种无动力输送系统,其中,包括:
38.一框架,具有一容置空间;
39.多数个如前所述本发明的无动力输送装置,是设置在所述容置空间内,并依一排列方式规则排列;以及
40.至少一温湿度传感器,设置于所述容置空间内。
41.在一实施例中,其中,所述排列方式为下列任一种:单线水平排列、多线水平排列、单线层迭排列、多线层迭排列、单线水平排列组合单线层迭排列、或多线水平排列组合多线层迭排列。
42.在可行的实施例中,其中,前述本发明的无动力输送系统是更包括用以隔离灰尘、细菌与病毒的至少五个隔离片,其是结合至所述框架的左侧、右侧、前侧、后侧、以及上侧,使所述容置空间成为一无菌空间。
附图说明:
43.图1为本发明的一种无动力输送装置的第一实施例的立体图;
44.图2为本发明的无动力输送装置的第一实施例的部分分解图;
45.图3为图1所示的传动单元的侧视图;
46.图4为图1所示本发明的无动力输送装置的方块图;
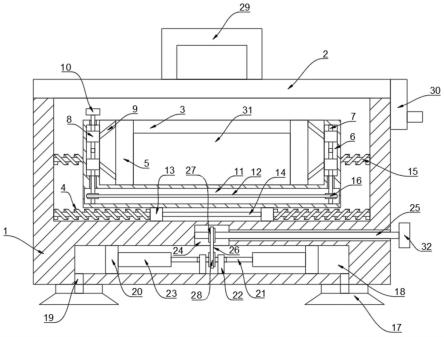
47.图5为本发明的一种无动力输送装置的第二实施例的第一立体图;
48.图6为本发明的无动力输送装置的第二实施例的第二立体图;
49.图7为本发明的一种无动力输送系统的第一立体图;以及
50.图8为本发明的无动力输送系统的第二立体图。
51.附图标记:
52.1:无动力输送装置
53.11:传动单元
54.111:设置架
55.112:传动轮
56.113:前支撑脚
57.114:后支撑脚
58.12:传感器
59.13:驱动马达
60.141:挡板
61.142:挡板升降机构
62.15:控制装置
63.16:可挠式压力感测片
64.17:机械手臂
65.18:冷却装置
66.2:无动力输送系统
67.21:框架
68.211:隔离片
具体实施方式:
69.为了能够更清楚地描述本发明所提出的一种无动力输送装置及系统,以下将配合附图,详尽说明本发明的较佳实施例。
70.无动力输送装置(第一实施例)
71.图1为本发明的一种无动力输送装置的第一实施例的立体图,且图2为本发明的无动力输送装置的第一实施例的部分分解图。如图1与图2所示,本发明的无动力输送装置1主要包括:一传动单元11、一阻挡单元以及一控制装置15,其中,所述传动单元11包括:一设置架111、设置在所述设置架111之上的k个传动轮112、支撑于所述设置架111之前端的至少一前支撑脚113、以及支撑于所述设置架111之后端的至少一后支撑脚114,其中k为正整数。进一步地,图3为图1所示的传动单元11的侧视图。特别地,本发明设计所述前支撑脚113的长度大于所述后支撑脚114的长度,使得所述传动单元11呈现前端高而后端低的态势。依此设计,放置在所述传动单元11之上的至少一个无菌组培盒会自然地滑移至所述传动单元11的后端,从而无动力地完成所述无菌组培盒的输送。
72.如图1与图3所示,在本发明的无动力输送装置1的结构中,所述阻挡单元包括:l个挡板141以及一挡板升降机构,其中,l为正整数,且所述l个挡板141等距插设在所述k个传动轮112之间。另一方面,所述控制装置15电性连接所述挡板升降机构142。进一步地,图4为图1所示本发明的无动力输送装置1的方块图。如图1、图3与图4所示,所述控制装置15可控制所述挡板升降机构142以升/降至少一个所述挡板141。在挡板141升起以阻挡所述无菌组培盒的滑移的情况下,是可接着以人工对所述无菌组培盒执行一组培操作。
73.更详细地说明,所述组培操作包括以下步骤:
74.(1)开启所述无菌组培盒的一密封盖;
75.(2)将一培养基注入所述无菌组培盒;
76.(3)冷却所述培养基以使其凝固;
77.(4)取一植物组织切片放入所述无菌组培盒之内;
78.(5)对所述无菌组培盒内部进行喷雾消毒;以及
79.(6)取所述密封盖对所述无菌组培盒封口。
80.通常,在完成步骤(6)之后,所述挡板141会下降以解除对于所述无菌组培盒的阻挡,使所述无菌组培盒可继续地自然滑移。然而,因摩擦力的关系,所述无菌组培盒有可能不再自然滑移,在此情况下,必须施加推力至所述无菌组培盒或者控制所述传动轮112转动,才能够使所述无菌组培盒继续地在所述传动单元11之上向前滑移。基于前述理由,如图1、图2与图4所示,本发明在各所述传动轮112之中整合有耦接所述控制装置15的一可挠式压力感测片16(flexible pressure sensor),同时还在所述无动力输送装置1的结构中增设了k个传感器12以及j个驱动马达13,其中j为正整数。
81.更详细地说明,所述控制装置15,电性连接所述挡板升降机构142、所述驱动马达13与所述k个传感器12。所述控制装置15是自所述可挠式压力感测片16接收一压力感测信号,从而借由所述压力感测信号判断所述无菌组培盒是否位于所述传动轮112之上。并且,各所述驱动马达13是连接一个所述传动轮112的一主轴,而各所述传感器12是连接一个所述传动轮112的所述主轴,用以感测所述传动轮112的一转动资讯并传送给所述控制装置15。通常,所述转动资讯包括转动距离、转动速度等。在一实施例中,所述驱动马达13可以是
步进马达、伺服马达器或者无刷直流(bldc)马达。并且,所述传感器12则可为旋转式光学编码器、霍尔效应式转速传感器或角度传感器。
82.依此设计,在所述挡板升降机构142降下指定的挡板141之后,所述无菌组培盒即不再受到所述挡板141的阻挡,因此可以继续地自然滑移。此时,所述控制装置15借由所述转动距离判断位于所述无菌组培盒下方的至少一个所述传动轮112是否转动,若未转动则表示所述无菌组培盒并没有滑移。因此,在前述的传动轮112未转动的情况下,所述控制装置15控制所述驱动马达13带动所述传动轮112转动,借此方式重启所述无菌组培盒在所述传动单元11向前滑移。
83.无动力输送装置(第二实施例)
84.图5、图6为本发明的一种无动力输送装置的第二实施例的第一、第二立体图。如图5与图6所示,本发明的无动力输送装置1的第二实施例主要包括:一传动单元11、k个传感器12、j个驱动马达13、一阻挡单元、一控制装置15、l个机械手臂17、l个冷却装置18、以及l个消毒喷雾装置,其中l为正整数。依据本发明的设计,所述l个机械手臂17是等距地设置在所述设置架111的一侧,且电性连接所述控制装置15。另一方面,所述个冷却装置18是等距地设置在所述设置架111的上方处,且电性连接所述控制装置15。并且,所述l个消毒喷雾装置是等距地设置在所述设置架111的上方处,且电性连接所述控制装置15。
85.依此设计,在一个所述无菌组培盒受到一个所述挡板141的阻挡而停止自然滑移的情况下,所述控制装置15控制一个所述机械手臂17、一个所述冷却装置18以及一个所述消毒喷雾装置从而对所述无菌组培盒执行一组培操作,所述组培操作包括如前所述的步骤(1)至步骤(6)。换句话说,当传动单元11放置用来执行组培操作的至少一个无菌组培盒之时,因所述传动单元11存在有一斜度,故无需动力即可使所述无菌组培盒在所述传动单元11缓慢向前滑移。进一步地,因为所述传动轮112是整合有可挠式压力感测片16,因此所述控制装置15在接收每个可挠式压力感测片16所传送的压力感测信号之后,其可以得知无菌组培盒移动至哪一个传动轮112之上。当无菌组培盒靠近挡板141之时,所述控制装置15即控制所述挡板升降机构142以升起指定的挡板141,借以阻挡停止无菌组培盒的滑移。接着,所述控制装置15控制一个所述机械手臂17、一个所述冷却装置18以及一个所述消毒喷雾装置从而对所述无菌组培盒执行一组培操作。
86.当此阶段的组培操作完成之后,所述控制装置15即控制所述挡板升降机构142以下降指定的挡板141,以让无菌组培盒可以继续前移至下一阶段(即,下一个挡板141)。依此类推,每一阶段,档板141都会被升起或降下,以完成整条自动化生产线的运行。在每一阶段中,都会执行包含上述的:开盖、注入培养基、冷却培养基、放组织切片、喷消毒喷雾、封盖等动作的组培操作。
87.无动力输送系统
88.图7为本发明的一种无动力输送系统的第一立体图。如图7所示,本发明的无动力输送装置2的主要包括:具有一容置空间的一框架21、多数个如前所述本发明的无动力输送装置1、以及设置于所述容置空间内的至少一温湿度传感器。依据本发明的设计,所述多数个无动力输送装置1是设置在所述容置空间内,并依一排列方式规则排列。在可行的实施例中,所述排列方式可为:单线水平排列、多线水平排列、单线层迭排列、多线层迭排列、单线水平排列组合单线层迭排列、或多线水平排列组合多线层迭排列。应可理解,采单线或多线
层迭排列时,可以搭配使用层架(rack)。
89.继续地参阅图7,并请同时参阅图8,其为本发明的无动力输送系统的第二立体图。如图7与图8所示,是可以在所述框架21的左侧、右侧、前侧、后侧、以及上侧各安装一个隔离片211,用以隔离灰尘、细菌与病毒,从而使所述框架21的容置空间成为一无菌空间。在可行的实施例中,所述隔离片211的制造材料可以是压克力或以具过滤效果的熔喷不织布。再者,还可在所述框架21的容置空间(即,无菌空间)内增设温湿度传感器,借以让无菌空间内形成一个适合组培的彷生态环境。
90.如此,上述已完整且清楚地说明本发明的一种无动力输送装置及系统。然而,必须加以强调的是,上述的详细说明是针对本发明可行实施例的具体说明,惟所述实施例并非用以限制本发明的权利要求范围,凡未脱离本发明技艺精神所为之等效实施或变更,均应包含于本案的权利要求范围中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。