1.本技术属于清洁设备技术领域,具体涉及一种清洁基站和清洁机器人系统以及清洁基站的控制方法。
背景技术:
2.家用智能设备在人们的生活中发挥着越来越重要的作用,由此,越来越多的家用智能设备出现在人们的生活中。其中,清洁机器人是较为常见的一种家用智能设备。清洁机器人通常配套有清洁基站,清洁基站与清洁机器人构成清洁机器人系统,清洁基站用于对清洁机器人的拖布进行清洗,以便清洁机器人进行下一次的清洁作业。
3.相关技术中,清洁基站设有污水槽,污水槽具有污水收集腔,污水收集腔位于污水槽的后部,即清洁基站远离供清洁机器人进入的坡面的一侧。由于污水会在污水收集腔停留一定的时间,因此清洁基站工作一段时间后,污水收集腔处的污渍较多,用户需要对该污水收集腔进行清洗。但污水收集腔比较靠后,因此不便于用户对清洁基站进行清洗。
技术实现要素:
4.本技术实施例的目的是提供一种清洁基站和清洁机器人系统以及清洁基站的控制方法,能够解决目前清洁基站的清洗较为不便的问题。
5.为了解决上述技术问题,本技术是这样实现的:
6.第一方面,本技术实施例提供了一种清洁基站,所述清洁基站设有与外界连通的机器人容纳空间,所述机器人容纳空间的入口处设有坡面,所述机器人容纳空间还设有蓄水槽,所述蓄水槽具有外沿区域和排污区域,所述外沿区域环绕所述排污区域,且所述外沿区域高于所述排污区域。
7.第二方面,本技术实施例还提供了一种清洁机器人系统,包括清洁基站和清洁机器人,所述清洁基站为上述的清洁基站,所述清洁基站可容纳所述清洁机器人。
8.第三方面,本技术实施例还提供了一种清洁基站的控制方法,应用于上述的清洁基站,所述控制方法包括:
9.响应于进水指令,打开清水泵,向所述蓄水槽内注入清水;
10.在所述蓄水槽的水位大于或等于最高水位的情况下,打开污水泵,以将所述蓄水槽内的污水排出;
11.所述污水泵工作第一预设时间后,若所述蓄水槽的水位小于所述最高水位,则关闭所述污水泵,否则控制所述污水泵继续以所述第一预设时间工作预设次数,若所述蓄水槽的水位仍大于或等于所述最高水位,则发出报警信号。
12.第四方面,本技术实施例还提供了另一种清洁基站的控制方法,应用于上述的清洁基站,所述控制方法包括:
13.响应于进水指令,打开清水泵,以使所述清水泵向所述蓄水槽内注入清水;
14.在所述清水泵的工作时间达到第二预设时间,且所述蓄水槽的水位小于最高水位
的情况下,打开污水泵,以使所述污水泵以第三预设时间将所述蓄水槽内的污水排出;
15.在所述清水泵的工作时间未达到第二预设时间,且所述蓄水槽的水位大于或等于最高水位的情况下,关闭所述清水泵,打开所述污水泵,以使所述污水泵以第四预设时间将所述蓄水槽内的污水排出;
16.所述污水泵工作所述第四预设时间后,若所述蓄水槽的水位小于所述最高水位,则关闭所述污水泵,否则控制所述污水泵继续以所述第四预设时间工作预设次数,若所述蓄水槽的水位仍大于或等于所述最高水位,则发出报警信号,
17.其中,所述第二预设时间小于所述第三预设时间,所述第三预设时间小于所述第四预设时间。
18.本技术实施例中,清洁基站的蓄水槽具有外沿区域和排污区域,外沿区域环绕排污区域,且外沿区域高于排污区域,以使污水尽可能地汇集到排污区域,然后通过排污区域将污水排出清洁基站之外;并且,由于排污区域被外沿区域环绕,因此排污区域的位置有所前移,使其更靠近机器人容纳空间的入口,便于用户清理排水区域残留的污渍。由此可知,本技术实施例能够解决目前清洁基站的清洗较为不便的问题。
附图说明
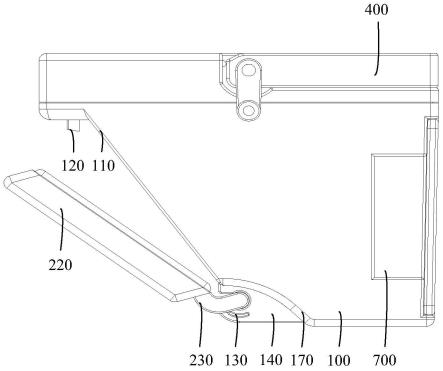
19.图1为本技术实施例公开的清洁基站的部分结构的结构示意图;
20.图2为本技术实施例公开的清洁基站的部分结构处于另一视角下的结构示意图;
21.图3为本技术实施例公开的清洁基站的部分结构的侧视图;
22.图4为本技术实施例公开的清洁基站的部分结构的剖视图;
23.图5为本技术实施例公开的清洁基站的控制方法的流程示意图;
24.图6为本技术另一实施例公开的清洁基站的控制方法的流程示意图。
25.附图标记说明:
26.110-坡面、120-蓄水槽、121-外沿区域、122-排污区域、123-沉槽、130-清洗盘、131-清水出口、140-排污管、141-入口端、150-排污盖、160-水满检测装置、170-通风管。
具体实施方式
27.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整的描述,显然,所描述的实施例是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
28.本技术的说明书和权利要求书中的术语“第一”、“第二”等是用于区别类似的对象,而不用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便本技术的实施例能够以除了在这里图示或描述的那些以外的顺序实施。此外,说明书以及权利要求中“和/或”表示所连接对象的至少其中之一,字符“/”,一般表示前后关联对象是一种“或”的关系。
29.下面结合附图,通过具体的实施例及其应用场景对本技术实施例提供的清洁基站和清洁机器人系统以及清洁基站的控制方法进行详细地说明。
30.参考图1至图4,本技术实施例公开一种清洁基站,清洁基站具有对清洁机器人进
行自清洁、充电等多种功能。清洁基站设有与外界连通的机器人容纳空间,机器人容纳空间的入口处设有坡面110,机器人容纳空间还设有蓄水槽120,蓄水槽120具有外沿区域121和排污区域122,外沿区域121环绕排污区域122,且外沿区域121高于排污区域122,以使污水尽可能地汇集到排污区域122,然后通过排污区域122将污水排出清洁基站之外;并且,由于排污区域122被外沿区域121环绕,因此排污区域122的位置有所前移,使其更靠近机器人容纳空间的入口,便于用户清理排污区域残留的污渍。由此可知,本技术实施例能够解决目前清洁基站的清洗较为不便的问题。
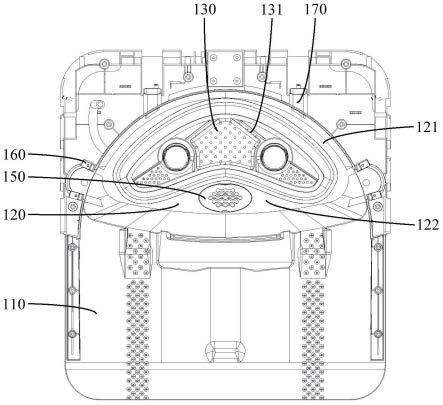
31.一种可选的实施例中,清洁基站还包括清洗盘130,清洗盘130用于对清洁机器人的拖布进行清洗。清洗盘130设有多个清水出口131,清水从清水出口131流入蓄水槽120内,然后通过清洗盘130对拖布进行清洗。可选地,排污区域122可以位于清洗盘130远离坡面110的一侧,此时该排污区域122距离机器人容纳空间的入口较远,不便于用户查看排污区域122的污渍是否清洗干净,污渍长时间滞留在清洁基站内容易滋生细菌。排污区域122位于坡面110和清洗盘130之间,此时该排污区域122距离机器人容纳空间的入口更近,便于用户查看排污区域122的污渍是否清洗干净,一旦排污区域122残留有污渍,用户可以手动清洗,或者再次向蓄水槽120内通清水,从而对排污区域122残留的污渍进行冲洗。
32.可选地,清洗盘130可以设置于蓄水槽120的中心区域,从而与拖布充分接触,以提高清洗效率。
33.可选地,清水出口131设置于清洗盘130的边缘,以避免拖布遮挡住清水出口131,导致清水无法流出。
34.可选的实施例中,清洁基站还包括排污管140,排污管140用于将污水排出至清洁基站之外。排污区域122设有排污盖150,排污盖150设有多个通孔,排污盖150与蓄水槽120的底面之间形成排污腔,排污管140的入口端141与排污腔相连通。污水通过排污盖150上的通孔流入排污腔内,然后由排污管140排出;与此同时,污水中的较大颗粒的杂质被过滤到排污盖150之外,避免杂质堵塞排污管140,即杂质留置在蓄水槽120中,可以通过手动清理的方式去除。另外,由于排污盖150的设置可以避免较大颗粒的杂质进入排污管140,此时排污管140的直径可以设置的较小,从而减小排污管140的占用空间,方便排污管140的设置。
35.可选地,蓄水槽120可以为阶梯结构,而污水中存在污泥等杂质,阶梯结构的蓄水槽120容易导致杂质堆积,不便于排污。故,进一步可选地,在外沿区域121向排污腔延伸的方向上,蓄水槽120的高度逐渐减小,即蓄水槽120为锥形结构,以避免杂质堆积,从而提升排污效率。
36.进一步可选的实施例中,排污区域122设有沉槽123,排污盖150覆盖沉槽123,沉槽123和排污盖150之间形成排污腔。沉槽123所处的位置相对于排污区域122所处的位置更低,更便于污水汇集到排污腔内,然后通过排污管140排出。因此,本技术实施例通过设置沉槽123,将进一步提高清洁基站的排污效率。
37.排污盖150可以粘接于机器人容纳空间内,但是一旦排污腔内存在较多杂质需要清理,此时排污盖150的拆卸较为复杂,且成本较大。故,可选的实施例中,排污盖150可拆卸地设置于机器人容纳空间内,以便于清理排污腔内的杂质,从而提高排污效率。
38.可选地,通孔可以为圆孔,以便于开设更多数量的通孔;当然,通孔也可以为三角形孔、矩形孔等,但是由于排污盖150的面积有限,在相同流通量的条件下,三角形、矩形所
占面积区域更大,相应地通孔数量也就较少,不便于污水流入排污腔。如果通孔的直径设置的较大,此时排污盖150的过滤效果较差;如果通孔的直径设置的较小,此时不便于污水流入排污腔。故,通孔的直径为0.5~7mm,既可以将杂质过滤在排污腔之外,又便于污水流入排污腔内。
39.可选地,清洁基站还包括通风管170,通风管170设置于蓄水槽120远离坡面110的一侧,且通风管170与蓄水槽120相连通,当拖布清洗完后,向蓄水槽120内通风,以烘干拖布,避免拖布长时间潮湿滋生细菌;可选地,该通风管170吹出到蓄水槽120内的风可以是冷风,也可以是热风,以加快风干效率,这里对通风管170吹出的风不作具体限制。进一步可选地,通风管170的数量为至少两个,其中包括第一通风管和第二通风管,第一通风管和第二通风管间隔设置,清洁机器人的拖布与通风管170一一对应设置,从而快速地将拖布烘干,以提升风干效果。
40.又一种可选的实施例中,清洁基站还包括水满检测装置160和排污泵,水满检测装置160对应蓄水槽120的最高水位处设置于机器人容纳空间内,水满检测装置160用于检测蓄水槽120内的水位是否到达预设位置,即蓄水槽120内是否水满。在蓄水槽120的水位大于或等于最高水位的情况下,水满检测装置160发出排污控制信号,此时开启排污泵,从而将蓄水槽120内的污水排出清洁基站之外;并且,采用此种设置方式进行排污,水满检测装置160的检测数据较少,控制方法较为简单,从而使清洁基站的生产成本更低。
41.可选地,水满检测装置160包括正极导电片和负极导电片,当蓄水槽120内的水浸没正极导电片和负极导电片时,正极导电片与负极导电片电导通,其较为灵敏,检测的精准性较高。当然,该水满检测装置160可以为位置传感器等,这里不作具体限制。
42.由于污水区域122低于外沿区域121,污水将汇集到污水区域122,如果将水满检测装置160设置于外沿区域121的较高位置,污水可能长时间滞留在污水区域,容易滋生细菌。故,可选地,水满检测装置160设置于外沿区域121的最低处,此时能够使汇集到污水区域的污水及时排出。
43.可选地,水满检测装置160的数量可以为一个,也可以为至少两个,当水满检测装置160的数量为一个时,该水满检测装置160的检测范围较为局限,其检测的精准性较差,容易出现误差,或者,一旦该水满检测装置160出现故障,将无法检测到蓄水槽120内的污水是否水满。故,进一步可选地,水满检测装置160的数量为至少两个,其中包括第一检测装置和第二检测装置,第一检测装置、排污区域122和第二检测装置沿清洁基站的宽度方向依次排布,以使水满检测装置160设置在较低的位置,从而更精确地检测蓄水槽120的水位是否达到最大水位;至少两个水满检测装置160对应多个位置进行检测,因此可以增大检测范围,提高水满检测装置160的精确性;另外,一旦第一检测装置和第二检测装置中的一个出现故障,另一个仍可以检测蓄水槽120内污水的水位。
44.基于本技术实施例公开的清洁基站,本技术实施例还公开了一种清洁机器人系统,其包括清洁基站和清洁机器人,清洁基站为上述任意实施例所述的清洁基站,清洁基站可容纳清洁机器人。
45.参考图5,基于本技术实施例公开的清洁基站,本技术实施例还公开一种清洁基站的控制方法,所公开的控制方法应用于上文所述任一实施例公开的清洁基站中,所公开的控制方法包括:
46.s100、响应于进水指令,打开清水泵,以使清水泵向蓄水槽120内注入清水。
47.本步骤中,进水指令具体指需要清洗清洁机器人的拖布的指令。
48.s200、在蓄水槽120的水位大于或等于最高水位的情况下,打开污水泵,以将蓄水槽120内的污水排出。
49.本步骤中的最高水位具体可以指蓄水槽120的水满位置,当蓄水槽120的水位大于或等于最高水位时,清水泵停止工作,以避免蓄水槽120内的水位继续上升,此时拖布已清洗完成,然后打开污水泵,以将蓄水槽120内的污水排出,避免滋生细菌。
50.s300、污水泵工作第一预设时间后,若蓄水槽120的水位小于最高水位,则关闭污水泵,否则控制污水泵继续以第一预设时间工作预设次数,若蓄水槽120的水位仍大于或等于最高水位,则发出报警信号。
51.本步骤中的第一预设时间具体可以为20s,第一预设时间过长容易导致污水排完后污水泵空转,第一预设时间过短容易导致污水未排尽,当然,该第一预设时间也可以根据拖布的清洗时间具体设置,这里不作具体限制;预设次数可以为两次或三次,由于拖布清洗完后,拖布上水分较多,而该部分水分会持续流到蓄水槽120内,因此需要污水泵再次排水;或者,当蓄水槽120内的污水较多时,一次排不干净,需要再次排水,但是当多次排污后蓄水槽120内仍存在污水时,则排水系统可能出现故障,需要提醒用户查看。
52.由此可知,本控制方法中,根据蓄水槽120内是否水满,从而控制污水泵的开启,其控制方法较为简单,易于操作。
53.参考图6,基于本技术实施例公开的清洁基站,本技术实施例还公开另一种清洁基站的控制方法,所公开的控制方法应用于上文所述任一实施例公开的清洁基站中,所公开的控制方法包括:
54.s100、响应于进水指令,打开清水泵,以使清水泵向蓄水槽120内注入清水。
55.本步骤中的进水指令具体指需要清洗清洁机器人的拖布的指令。
56.s200、在清水泵的工作时间达到第二预设时间,且蓄水槽120的水位小于最高水位的情况下,打开污水泵,以使污水泵以第三预设时间将蓄水槽120内的污水排出。
57.本步骤中的第二预设时间具体可以为10s,第三预设时间具体可以为15s,当然,第一预设时间和第二预设时间也可以为其它数值,这里不作具体限制;最高水位具体可以指蓄水槽120的水满位置。也就是说,当清水泵向蓄水槽120注入清水的时间持续10s时,蓄水槽120内的水仍未满,但是拖布已经清洗完,此时清水泵停止工作,需要将蓄水槽120内的污水排出,避免滋生细菌。
58.s300、在清水泵的工作时间未达到第二预设时间,且蓄水槽120的水位大于或等于最高水位的情况下,关闭清水泵,打开污水泵,以使污水泵以第四预设时间将蓄水槽120内的污水排出。
59.本步骤中的第四预设时间具体可以为20s,当然,第四预设时间也可以为其它数值,这里不作具体限制。此种情况下,清水泵向蓄水槽120注入清水的时间未到达10s,但是蓄水槽120内已经水满,此时需要关闭清水泵,避免蓄水槽120内的水溢出。
60.s400、污水泵工作第四预设时间后,若蓄水槽120的水位小于最高水位,则关闭污水泵,否则控制污水泵继续以第四预设时间工作预设次数,若蓄水槽120的水位仍大于或等于最高水位,则发出报警信号,其中,第二预设时间小于第三预设时间,第三预设时间小于
第四预设时间。
61.本步骤中的工作预设次数可以为两次或三次,由于拖布清洗完后,拖布上水分较多,而该部分水分会持续流到蓄水槽120内,因此需要污水泵多次排水;或者,当蓄水槽120内的污水较多时,一次排不干净,需要再次排水,但是当多次排污后蓄水槽120内仍存在污水时,则排水系统可能出现故障,需要提醒用户查看。另外,需要说明的是,本步骤中的第二预设时间、第三预设时间和第四预设时间也可以相等,这里不作具体限制。
62.由此可知,上述两种控制方法可以通过水满检测装置获得蓄水槽120的水位是否小于最高水位,或蓄水槽120的水位是否大于或等于最高水位,进而根据清水泵的工作时间和水满检测装置的检测结果控制污水泵的工作时间,从而对清洁基站进行了双重保护,有利于提升清洁基站的安全性。
63.上述两种控制方法中,清洁基站的蓄水槽120具有外沿区域121和排污区域122,外沿区域121环绕排污区域122,且外沿区域121高于排污区域122,以使污水尽可能地汇集到排污区域122,然后通过排污区域122将污水排出清洁基站之外;并且,由于排污区域122被外沿区域121环绕,因此排污区域122的位置有所前移,使其更靠近机器人容纳空间的入口,便于用户清理排水区域残留的污渍。由此可知,本技术实施例能够解决目前清洁基站的清洗较为不便的问题。
64.上面结合附图对本技术的实施例进行了描述,但是本技术并不局限于上述的具体实施方式,上述的具体实施方式仅仅是示意性的,而不是限制性的,本领域的普通技术人员在本技术的启示下,在不脱离本技术宗旨和权利要求所保护的范围情况下,还可做出很多形式,均属于本技术的保护之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。