1.本实用新型属于光学检测技术领域,具体涉及到一种应用于天文底片扫描仪运动姿态的测量装置,其适用于天文底片扫描仪运动姿态的测量。
背景技术:
2.目前相机已被广泛应用在望远镜成像中。早年相机未被研制出来望远镜拍照是使用天文底片,而天文底片的尺寸较大:多为300mm
×
300mm;但天文底片是长期观测的资料数据,它记录了100多年天体的位置和活动信息,是当时所拍摄天体目标的不可再现的唯一的观测记录,天文底片的保存不易、易损坏,需要将天文底片数字化保存起来。
3.天文底片的数字化是将大尺寸天文底片的若干的小尺寸区域,经平台扫描运动使用成像镜头成像于相机靶面上,最后将多组成像单元按照一定的顺序及处理方式,将其图像拼接处理复原成大尺寸的天文底片,实现数字化保存。天文底片扫描仪是用于扫描天文底片实现天文底片的数字化的专用仪器。
4.天文底片多为尺寸300mm
×
300mm的玻璃底片,根据天文底片尺寸大小以及底片材料特性,中国科学院上海天文台已研制完成的天文底片扫描仪如图1所示。
5.如图1所示,天文底片扫描仪的主要组成部件包括:成像相机1、成像镜头2、光源3、天文底片4、底片仓5、运动平台6、大理石平台7、扫描仪底座8、扫描仪控制系统9。在本实施例中,运动平台6为二维气浮导轨运动平台,二维气浮导轨运动平台的功能是可以沿x、y两个方向移动。
6.现有的天文底片扫描仪的工作原理及过程如下:
7.扫描仪底座8、大理石平台7、运动平台6和底片仓5自下而上依次固定。光源3是固定在天底片仓5的底部(即运动平台6上)不移动,成像镜头2用螺钉固定在大理石龙门横梁上的调整架上不移动,成像相机1通过螺钉固定在成像镜头2上,由此,光源3、天文底片4、成像镜头2、成像相机1形成了天文底片的成像光路结构。扫描仪控制系统9与所述运动平台6、光源3和成像相机1通信连接,以控制运动平台6的运动扫描、光源3的启动和成像相机1的拍摄。
8.在工作时,首先将天文底片4放置在底片仓5内,启动扫描仪控制系统9,首先运动平台6在初始位置,同时开启光源3来照明天文底片4、关闭室内照明。成像原理如下:光源3从底部照明天文底片,然后通过成像镜头2将底片上的天体目标信息1:1地成像于顶部的成像相机1上;由于成像相机1的靶面小而天文底片4的尺寸大,因此扫描仪采用面扫描模式:即,打开扫描仪控制软件开始以面扫描模式扫描天文底片4,扫描时利用成像镜头2和成像相机1对天文底片进行面扫描拍摄,移动天文底片4至拍摄位置、成像相机1拍摄成像、多次拍照最后对拍摄的照片进行图像拼接和图像数据处理,实现底片的数字化保存起来,以复原图像。在天文底片4扫描的过程中,运动平台6仅仅带动天文底片4和底片仓5运动。其中,工作时,运动平台6上只有底片和底片仓。
9.当需要定期精度检测标校时,运动平台6上还会可能需要放置其他装置来测量平
台误差。由于天文底片的面扫描拍照是通过天文底片扫描仪的二维运动平台来实现的,因此天文底片扫描仪的运动平台的精度直接影响到天文底片复原的精度。精度误差来源于底片扫描仪的运动误差:包括:直线性、位置定位精度、重复定位精度;姿态误差包括:俯仰角、旋转角和滚转角,其中,天文底片扫描仪的运动姿态对扫描拼接精度有一定的影响。因此,需要定期对天文底片扫描仪的运动姿态进行测量并进行误差补偿,提高扫描拼接精度。
10.对于天文底片扫描仪的运动平台的运动姿态的测量方法,常用的是雷尼绍或安捷伦的激光干涉仪对其姿态进行测量。雷尼绍激光干涉仪是利用激光干涉仪和多个角度测量块组成俯仰角测量系统、旋转角测量系统以及滚转角测试系统分别测出运动姿态,是一种分时分步的测量方法,不同运动姿态需要与不同的角度测量模块组合测量,搭建测量系统。另一种安捷伦双频激光干涉仪测量角度方法方案更为复杂,是利用多块光学元件包括分光镜、多个干涉镜、平面镜及角度镜等组成较为复杂的运动姿态测量系统进行测量。
11.虽然这两种测量方法都可以测量角度运动姿态,但安捷伦双频激光干涉仪要想测量角度运动姿态需要搭建较为复杂测量系统才能实现,结构复杂耗时。雷尼绍激光干涉仪测量不同的角度误差时,需要不同的角度组件,来分别测量得到测量结果,不能同时得到三维角度的运动姿态误差。
12.光电自准直仪能够测量倾斜角度。具体来说,光电自准直仪与一块平面反射镜共同建立自准直测量系统,当把平面反射镜放在运动平台上运动,通过自准直反射像在像面的位置数据来计算出导轨运动姿态的二维数据俯仰角和旋转角。然而对于扫描仪的运动姿态是三维角度,除了俯仰角、旋转角还有滚转角,而平面镜对于绕准直光束转动的滚转角不会引起反射光束倾斜,不能测量滚转角。
技术实现要素:
13.本实用新型的目的在于提供一种应用于天文底片扫描仪运动姿态的测量装置,以解决天文底片扫描仪三维运动姿态不能同时测量的问题,实现运动姿态的同时测量。
14.为了实现上述目的,本实用新型提供一种应用于天文底片扫描仪运动姿态的测量装置,包括待测的天文底片扫描仪、以及彼此相对设置的光电自准直仪和目标装置,目标装置包括平面楔镜以及与平面楔镜和天文底片扫描仪的运动平台均连接的三维调整机构。
15.光电自准直仪采用螺钉固定在天文底片扫描仪之外的架子上,目标装置可拆卸地安装于待测的天文底片扫描仪的运动平台上。
16.待测的天文底片扫描仪包括自下而上依次固定的扫描仪底座、大理石平台、运动平台和底片仓,底片仓内放置有天文底片,光源固定在天底片仓的底部;大理石平台上设有大理石龙门横梁,成像镜头用螺钉固定在大理石龙门横梁上的调整架上,成像相机通过螺钉固定在成像镜头上;扫描仪控制系统与所述运动平台、光源和成像相机通信连接。
17.目标装置通过螺钉固定在底片仓的平台上,以通过底片仓固定在待测的天文底片扫描仪的运动平台上。
18.所述平面楔镜的两个表面均为平面,前表面和后表面均经过光学加工,且两个表面之间有一固定的楔角。
19.所述平面楔镜的楔角为30
″
。
20.所述平面楔镜的前表面镀有半透半反膜层,后表面镀有金属反射膜。
21.所述金属反射膜包括铝膜、金膜和银膜中的一种。
22.本实用新型的应用于天文底片扫描仪运动姿态的测量装置,具体的是应用光电自准直仪对准天文底片扫描仪运动平台上的目标装置(包括平面楔镜和三维调整机构),在光电自准直仪像面上获得平面楔镜前后两表面初始的反射像及姿态角数据,再经过平台运动后获得两个反射像的新的姿态角及数据,通过对两个反射像姿态角的倾斜量来评估运动平台的三维运动姿态状态。本测量装置是通过光电自准直仪对平面楔镜的两表面反射像倾角的测量,解决天文底片扫描仪三维运动姿态不能同时测量的问题,实现运动姿态的同时测量,而且本实用新型结构简单、光路搭建方便等优点。
附图说明
23.图1是一种典型的天文底片扫描仪的结构系统图。
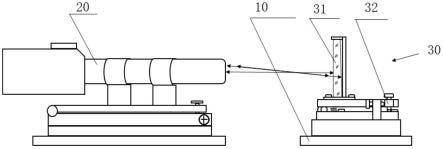
24.图2是本实用新型的应用于天文底片扫描仪运动姿态的测量装置的系统结构图。
25.图3是本实用新型的应用于天文底片扫描仪运动姿态的测量装置的目标装置的结构图。
26.图4是天文底片扫描仪的三维的运动姿态角的定义图。
27.图5是反射像数据采集界面图。
28.附图标记:1-成像相机,2-成像镜头,3-光源,4-天文底片,5-底片仓,6-气浮二维运动平台,7-大理石平台,8-扫描仪底座,9-扫描控制系统;10-天文底片扫描仪;20-光电自准直仪;30-目标装置;31-平面楔镜;32-三维调整机构;i1-前表面反射像,i2-后表面反射像,i0-光电自准直仪中心。
具体实施方式
29.以下结合具体实施例,对本实用新型做进一步说明。应理解,以下实施例仅用于说明本实用新型而非用于限制本实用新型的范围。
30.本实用新型提供一种应用于天文底片扫描仪运动姿态的测量装置,其适用于天文底片扫描仪的三维的运动姿态角的测量。本实用新型的运动姿态测量装置基于光电自准值仪测量倾斜角度的方法,通过目标装置和光电自准直仪配合使用来实现实时运动姿态测量,并且采用一块楔镜来代替平面镜作为光电自准直仪的配合装置,来实现除俯仰角、旋转角外的滚转角的测量。
31.如图2和图3所示,本实用新型的应用于天文底片扫描仪运动姿态的测量装置用于实现天文底片扫描仪的三维的运动姿态角的测量,其包括待测的天文底片扫描仪10、以及彼此相对设置的光电自准直仪20和目标装置30。
32.其中,待测的天文底片扫描仪10如上文所述,包括自下而上依次固定的扫描仪底座8、大理石平台7、运动平台6和底片仓5,底片仓5内放置有天文底片4,光源3固定在天底片仓5的底部。大理石平台7上设有大理石龙门横梁,成像镜头2用螺钉固定在大理石龙门横梁上的调整架上不移动,成像相机1通过螺钉固定在成像镜头2上,由此,光源3、天文底片4、成像镜头2、成像相机1形成了天文底片的成像光路结构。扫描仪控制系统9与所述运动平台6、光源3和成像相机1通信连接,以控制运动平台6的运动扫描、光源3的启动和成像相机1的拍摄。
33.光电自准直仪20采用螺钉固定在天文底片扫描仪10之外(尤其是天文底片扫描仪10的运动平台之外)的稳固的架子上。目标装置30可拆卸地安装于待测的天文底片扫描仪10的运动平台6上,具体来说,目标装置30通过螺钉固定在底片仓5的平台上,以通过底片仓5固定在待测的天文底片扫描仪10的运动平台6上。目标装置30包括平面楔镜31以及与平面楔镜31和天文底片扫描仪10的运动平台均连接的三维调整机构32。
34.如图4所示,三维调整机构32用于实现平面楔镜31的三维的运动姿态角的调整,该三维的运动姿态角包括绕x轴的俯仰角θ
x
、绕x轴的俯仰角θ
x
和绕z轴的滚转角θz。类似地,天文底片扫描仪的三维的运动姿态角同样包括旋转角θy、俯仰角θ
x
和滚转角θz。
35.光电自准直仪是一种利用光的自准直原理测量小角度的仪器。本实用新型使用光电自准直仪对扫描仪运动平台的运动姿态进行测量,其工作原理如下:本实用新型的目标装置30包括平面楔镜31和三维调整机构32,该目标装置可拆卸地固定在扫描仪平台上,通过目标装置在光电自准直仪内的反射像的信息来分解出三维的运动姿态角:旋转角θy、俯仰角θ
x
和滚转角θz。具体的是:从光电自准直仪中发出的十字平行光(即一束截面为十字形状的平行光),十字平行光经目标装置的平面楔镜31的前后两表面反射后返回光电自准直仪20内,成像于光电自准直仪20内的探测相机上,得到前表面反射像i1和后表面反射像i2。当平面楔镜倾斜一倾斜角α时,根据光的反射定律,前表面反射像i1会在相机上产生一个位移d,光电自准直仪20的光源和相机靶面都是位于物镜的焦平面上,据此可以得到位移d与平面楔镜31的倾斜角α的关系:tanα=d/2f,其中f为光电自准直仪20和平面楔镜31之间的距离。根据这个关系式就可计算出三维的运动姿态角变化引起的平面楔镜的倾斜角的变化。
36.由此,利用光电自准直仪20照射平面楔镜31的两个面,当待测的天文底片扫描仪10的运动平台有滚转角姿态变化时,前表面反射像i1和后表面反射像i2之间的位移d将绕光电自准直仪20的中心旋转,此时将能测量出滚转角。
37.在本实用新型中,平面楔镜31的两个表面均为平面,前表面和后表面均经过光学加工,两个表面具有高精度的面型精度,且两个表面之间有一固定的楔角。楔角的大小没有特别的规定,这与光电自准直仪与平面楔镜的距离d,和光电自准直仪视场有关,如果楔角过大,反射像将不在视场之内,在本实施例中,采用的平面楔镜31的楔角为30
″
。平面楔镜31的前表面镀有半透半反膜层(50%的光反射50%的光透射),后表面镀有金属反射膜,金属反射膜包括铝膜、金膜和银膜中的一种。由此,可以利用平面楔镜31的两表面反射数据测量运动平台的三维运动姿态。
38.基于上述的应用于天文底片扫描仪运动姿态的测量装置及其工作原理,所实现的应用于天文底片扫描仪运动姿态的测量方法,其具体包括以下步骤:
39.步骤s1:利用待测的天文底片扫描仪10搭建上文所述的应用于天文底片扫描仪运动姿态的测量装置;
40.如图4所示,该应用于天文底片扫描仪运动姿态的测量装置包括待测的天文底片扫描仪10、以及彼此相对设置的光电自准直仪20和目标装置30,且平面楔镜31以及与平面楔镜31和天文底片扫描仪的运动平台10均连接的三维调整机构32。
41.所述步骤s1具体包括:
42.步骤s11:将平面楔镜31安装在三维调整机构32以组成目标装置30;
43.步骤s12:将目标装置30安装于待测的天文底片扫描仪10的运动平台上。
44.步骤s2:将光电自准直仪1对准平面楔镜31的前表面,通过调整平面楔镜31的俯仰角和旋转角,使得光电自准直仪20出射光经平面楔镜31的前表面返回至光电自准直仪20的探测面上以形成前表面反射像i1,并使得前表面反射像i1与光电自准直仪20的探测面的中心重合;
45.如图4所示,光电自准直仪20的中心为i0,经平面楔镜31的前表面返回至光电自准直仪20的探测面上的十字像中心为前表面反射像i1,因此,图中的i0和i1重合,即前表面反射像与光电自准直仪20的中心重合。这个光轴中心i0是光电自准直内固有的不动不变的中心。
46.此时,光电自准直仪1中有两个反射像:一个为前表面反射像i1,另一个为后表面反射像i2,此时获得两反射像的初始数据:由于平面楔镜的折射率和楔角是一定的,则两个反射像的相对位置是固定的。
47.步骤s3:如图4所示,调整平面楔镜31绕光电自准直仪1发射的光所在的光轴(即z轴)旋转,使得后表面反射像i2的在光电自准直仪1的探测面上的坐标为(x,0),即调整后表面反射像i2的坐标在y轴上的数据为0;
48.步骤s4:记录平面楔镜31的前表面反射像i1和后表面反射像i2的两组倾斜数据,作为初始倾斜数据;
49.步骤s5:在天文底片扫描仪扫描运动到某一位置有三维倾角姿态时,测量前表面反射像i1和后表面反射像i2的当前的倾斜数据;
50.当平台运动到某一个位置有三维姿态变化时,前表面反射像i1和后表面反射像i2在光电自准直仪1的探测面上的坐标上的位置发生了变化,此时将得到两个反射像的倾角数据。
51.步骤s6:将获得的前表面反射像i1和后表面反射像i2的当前的倾斜数据与初始倾斜数据进行数据处理,从前表面反射像i1的当前的倾斜数据中分解出俯仰角和旋转角,根据后表面反射像i2的当前的倾斜数据、初始倾斜数据及固定楔角数据求解出除去俯仰角、旋转角之外的滚转角数据,从而测量出运动平台的三维运动姿态。
52.俯仰角、旋转角的公式如上文所述,当平面楔镜31倾斜一倾斜角α(倾斜角α包含俯仰角和旋转角的合角)时,根据光的反射定律,前表面反射像i1会在相机上产生一个位移d,光电自准直仪20的光源和相机靶面都是位于物镜的焦平面上,据此可以得到位移d与平面楔镜31的倾斜角α的关系:tanα=d/2f,其中f为光电自准直仪20和平面楔镜31之间的距离。平面楔镜的倾斜方向根据位移d的方向获得。
53.由于,具体的后表面反射像i2初始位置是(x,0),当平面楔镜31仅有滚转角发生变化时,后表面反射像i2位置是(x1,y1),则滚转角为tanθz=y1/x1。
54.由此,本实用新型的测量装置可以通过将平面楔镜放在天文底片扫描仪的运动平台上与其一起运动,通过光电自准直仪软件同时获得前表面反射像和后表面反射像的位置数据,通过数据处理分析判别两反射像倾斜角数据,求解出俯仰角和旋转角和对应的滚转角;解决扫描仪运动平台的三维姿态角的同时测量问题。利用测量前后表面反射像与自准直仪中心的倾斜偏差量的倾斜数据分解出平台三维运动姿态角即俯仰角、旋转角和滚转角数据,最终获得扫描仪三维运动姿态角。
55.以上所述的,仅为本实用新型的较佳实施例,并非用以限定本实用新型的范围,本实用新型的上述实施例还可以做出各种变化。凡是依据本实用新型申请的权利要求书及说明书内容所作的简单、等效变化与修饰,皆落入本实用新型专利的权利要求保护范围。本实用新型未详尽描述的均为常规技术内容。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
