1.本实用新型涉及管型带线束的氮氧传感器激光焊接技术领域,尤其涉及一种氮氧传感器的焊接设备。
背景技术:
2.氮氧传感器尾管和废气罩在组装后需要进行激光焊接来加固和密封。由于氮氧传感器的探头组件和线束组件都比较长,激光焊接时,一般采用将产品水平放置,用三爪卡盘夹持氮氧传感器的尾管作为径向定位并夹紧,用限位块紧贴废气罩的顶面进行轴向定位。这种定位方式虽然简单,但存在如下问题:
3.1.废气罩和尾管都是组装件,组装后废气罩和支撑管、尾管的同轴度较差,废气罩在焊接时容易径向跳动导致废气罩偏离激光焦距,影响废气罩的焊接质量;
4.2.废气罩和尾管都是组装件,组装后废气罩和支撑管、尾管的轴向位置公差较大,用废气罩的顶面进行轴向定位,会导致废气罩焊缝和尾管焊缝的轴向位置有较大波动,影响废气罩和尾管的焊接质量,影响氮氧传感器的产品气密性;
5.3.产品水平放置,旋转焊接时,产品线束组件受重力容易扭曲而产生内应力,导致产品内部端子接触不良。
技术实现要素:
6.本实用新型为了解决现有的问题,提供一种氮氧传感器的焊接设备。
7.为了解决上述问题,本实用新型采用的技术方案如下所述:
8.一种氮氧传感器的焊接设备,包括限位单元、焊接单元和激光单元;所述限位单元包括机台底板、固定支座和限位套管,所述固定支座的底面设置在所述机台底板上,用于固定所述限位套管;所述限位套管用于在径向和轴向上固定探头组件;所述焊接单元设置在所述机台底板上,与所述固定支座前后设置且所述焊接单元与所述限位套管的轴心重合;所述激光单元设置在所述机台底板上,在水平方向与所述固定支座对齐。
9.优选地,所述限位单元还包括滑轨、限位滑块和固定气缸;所述固定支座包括前方竖直面设置面和顶面设置面;所述滑轨沿竖直方向设置在所述固定支座的所述前方竖直面设置面上;所述限位滑块设置在所述滑轨上且沿着所述滑轨在竖直方向上移动;所述限位套管设置在所述限位滑块前端的下侧面上;所述固定气缸设置在所述固定支座的所述顶面设置面上,所述固定气缸的活塞杆连接所述限位滑块。
10.优选地,所述限位套管中插入所述探头组件时,所述探头组件的支撑管基准面紧贴所述限位套管的底面。
11.优选地,所述焊接单元包括底盘、齿轮盘、齿轮、夹爪和伺服电机;所述底盘设置在所述限位单元的所述机台底板上;所述齿轮盘设置在所述底盘上;所述底盘上设置所述齿轮,所述齿轮盘上设置所述夹爪,所述伺服电机设置在所述底盘的下侧面,用于驱动所述齿轮。
12.优选地,所述齿轮包括主动齿轮和从动齿轮,所述伺服电机的转动轴穿过所述底盘,所述主动齿轮设置在所述伺服电机的所述转动轴上;所述从动齿轮至少为2个。
13.优选地,所述从动齿轮为2个,所述主动齿轮和2个所述从动齿轮成120
°
夹角布置。
14.优选地,所述夹爪包括活动夹爪和固定夹爪,所述固定夹爪至少为2个。
15.优选地,所述固定夹爪为2个,所述活动夹爪为1个,所述活动夹爪和2个所述固定夹爪成120
°
夹角布置。
16.优选地,所述底盘和所述齿轮盘的中心都设置避开孔,所述避开孔用于供所述探头组件穿过。
17.优选地,所述激光单元包括x轴滑轨、z轴滑轨、y轴滑轨和激光焊接头;所述x轴滑轨水平设置在所述机台底板上,且与所述固定支座对齐;所述z轴滑轨设置在所述x轴滑轨上面;所述y轴滑轨设置在所述z轴滑轨上面;所述激光焊接头设置在所述y轴滑轨上面。
18.本实用新型的有益效果为:提供一种氮氧传感器的焊接设备,通过有序设置限位单元、焊接单元和激光单元使氮氧传感器在焊接时竖直放置,让探头组件和线束组件自然下垂,避免线束组件扭曲而产生内应力,减少重力对产品质量的影响。
19.进一步地,本技术通过限位套管对探头组件进行定位,改善废气罩的焊接质量;改善尾管的焊接质量,改善氮氧传感器的产品气密性。
附图说明
20.图1是本实用新型实施例中氮氧传感器的结构示意图。
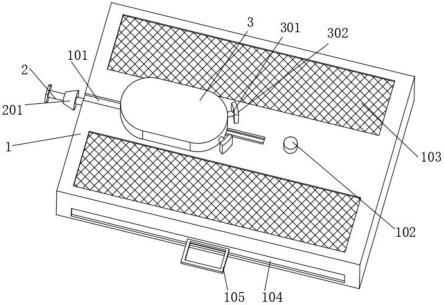
21.图2是本实用新型实施例中现有技术的氮氧传感器的焊接状态结构示意图。
22.图3是本实用新型实施例中氮氧传感器的焊接设备的结构示意图。
23.图4是本实用新型实施例中氮氧传感器的焊接设备的焊接状态正视图。
24.图5是本实用新型实施例中氮氧传感器的焊接设备的装夹状态正视图。
25.图6是本实用新型实施例中氮氧传感器的焊接设备的焊接状态剖视图。
26.图7是本实用新型实施例中氮氧传感器的焊接设备的装夹状态剖视图。
27.图8是本实用新型实施例中焊接单元俯视图。
28.其中,11-探头组件;111-废气罩;112-支撑管;1121-支撑管基准面;113-螺母;114-尾管;115-废气罩焊缝;116-尾管焊缝;12-线束组件;121-线束;122-控制盒;21-限位单元;211-机台底板;212-固定支座;213-滑轨;214-限位滑块;215-限位套管;216-固定气缸;22-焊接单元;221-底盘;222-齿轮盘;223-主动齿轮;224-从动齿轮;225-固定夹爪;226-活动夹爪;227-伺服电机;23-激光单元;231-x轴滑轨;232-z轴滑轨;233-y轴滑轨;234-激光焊接头。
具体实施方式
29.下面结合附图通过具体实施例对本实用新型进行详细的介绍,以使更好的理解本实用新型,但下述实施例并不限制本实用新型范围。另外,需要说明的是,下述实施例中所提供的图示仅以示意方式说明本实用新型的基本构思,附图中仅显示与本实用新型中有关的组件而非按照实际实施时的组件数目、形状及尺寸绘制,其实际实施时各组件的形状、数量及比例可为一种随意的改变,且其组件布局形态也可能更为复杂。
30.如图1和图2所示,氮氧传感器包含探头组件11和线束组件12。探头组件11包含废气罩111、支撑管112、螺母113和尾管114,需要焊接的位置为废气罩焊缝115和尾管焊缝116。线束组件12包含线束121和控制盒122。其中,螺母113套在支撑管112外面,支撑管112左侧一端和废气罩111铆压在一起,支撑管112右侧一端和尾管114铆压在一起,尾管114右侧一端安装线束组件12。探头组件11需焊接的位置为废气罩焊缝115和尾管焊缝116。废气罩焊缝115焊接的轴向位置距离基准面121的距离为a,尾管焊缝116的焊接的轴向位置距离支撑管基准面1121的距离为b。对氮氧传感器进行焊接时还包括端头限位31,三爪卡盘32,其中,废气罩焊缝115要求焊接牢固,尾管焊缝116既要求焊接牢固,又要保证产品气密性。
31.如图3-图7所示,本实用新型提供一种氮氧传感器的焊接设备,包括限位单元21、焊接单元22和激光单元23;
32.所述限位单元21包括机台底板211、固定支座212和限位套管215,所述固定支座212的底面设置在所述机台底板211上,用于固定所述限位套管215;所述限位套管215用于在径向和轴向上固定探头组件11;
33.所述焊接单元22设置在所述机台底板211上,与所述固定支座212前后设置且所述焊接单元22与所述限位套管215的轴心重合;
34.所述激光单元23设置在所述机台底板211上,在水平方向与所述固定支座211对齐。
35.本实用新型通过有序设置限位单元21、焊接单元22和激光单元23使氮氧传感器在焊接时竖直放置,让探头组件11和线束组件12自然下垂,避免线束组件12扭曲而产生内应力,减少重力对产品质量的影响。
36.进一步地,本技术通过限位套管对探头组件11进行定位,改善废气罩的焊接质量;改善尾管的焊接质量,改善氮氧传感器的产品气密性。
37.在本实用新型的一种实施例中,所述限位单元还包括滑轨213、限位滑块214和固定气缸216;
38.所述固定支座212包括前方竖直面设置面和顶面设置面;所述滑轨213沿竖直方向设置在所述固定支座212的所述前方竖直面设置面上;所述限位滑块214设置在所述滑轨213上且沿着所述滑轨213在竖直方向上移动;所述限位套管215设置在所述限位滑块214前端的下侧面上;所述固定气缸216设置在所述固定支座212的所述顶面设置面上,所述固定气缸216的活塞杆连接所述限位滑块214。
39.进一步地,所述限位套管215中插入所述探头组件11时,所述探头组件11的支撑管基准面1121紧贴所述限位套管215的底面。
40.在本实用新型的一种实施例中,所述焊接单元22包括底盘221、齿轮盘222、齿轮、夹爪和伺服电机227;
41.所述底盘221设置在所述限位单元21的所述机台底板211上;所述齿轮盘222设置在所述底盘221上;所述底盘221上设置所述齿轮,所述齿轮盘222上设置所述夹爪,所述伺服电机227设置在所述底盘221的下侧面,用于驱动所述齿轮。
42.所述齿轮包括主动齿轮223和从动齿轮224,所述伺服电机227的转动轴穿过所述底盘221,所述主动齿轮223设置在所述伺服电机227的所述转动轴上;所述从动齿轮224至少为2个。
43.如图8所示,在一种具体的实施例中,所述从动齿轮224为2个,所述主动齿轮223和2个所述从动齿轮224成120
°
夹角布置。
44.所述夹爪包括活动夹爪和固定夹爪,所述固定夹爪至少为2个。
45.继续如图8所示,在一种具体的实施例中,所述固定夹爪为2个,所述活动夹爪为1个,所述活动夹爪和2个所述固定夹爪成120
°
夹角布置。
46.焊接单元22中,所述底盘221和所述齿轮盘222的中心都设置避开孔,伺服电机227采用偏心传动设计,伺服电机227安装在底盘221下侧面的正后方位置,可以让探头组件11从避开孔穿过,方便氮氧传感器的探头组件11夹持固定。在底盘221上设计2个从动齿轮224,可以使齿轮盘222在旋转运动时受力平衡,避免径向晃动;在齿轮盘222上设计活动夹爪226和2个固定夹爪225,可以实现探头组件11快速装夹,提高效率。焊接时探头组件11装夹在齿轮盘222上面,伺服电机227通过主动齿轮223带动齿轮盘222转动。
47.在本实用新型的一种实施例中,所述激光单元23包括x轴滑轨231、z轴滑轨232、y轴滑轨233和激光焊接头234;
48.所述x轴滑轨231水平设置在所述机台底板211上,且与所述固定支座212对齐;所述z轴滑轨232设置在所述x轴滑轨231上面;所述y轴滑轨231设置在所述z轴滑轨232上面;所述激光焊接头234设置在所述y轴滑轨233上面,焊接时激光焊接头234处在探头组件11的左侧位置。
49.在一种具体的实施例中,固定支座212和焊接单元22设置在机台底板211的左边,且前后设置只需要保证所述焊接单元22与所述限位套管215的轴心重合;所述激光单元23设置在限位单元21的左侧,且x轴滑轨231与固定支座212水平方向上齐平。
50.焊接机台在工作时,首先固定气缸216推动限位滑块214到工作高度;然后将探头组件11从下往上穿过齿轮盘222中心的避开孔;将探头组件11插进限位套管215里面,将支撑管基准面1121紧贴限位套管215的底面;掰动活动夹爪226将探头组件11夹紧固定;固定气缸216拉动限位滑块214到最高位置漏出废气罩111;激光焊接头234发出激光焊接废气罩焊缝115和尾管焊缝116;掰动活动夹爪226将探头组件11取下,激光焊接操作完成。
51.可以理解的是,限位套管215和齿轮盘222轴心重合,限位套管215内壁对支撑管112进行径向限位,可以提高废气罩113和尾管114的径向限位精度,转动时减小废气罩113和尾管114的径向跳动;限位套管215底面对支撑管进行轴向限位,可以提高废气罩113和尾管114轴向的位置精度,可以提高废气罩焊缝115和尾管焊缝116的位置精度,提高焊接质量和产品气密性。
52.焊接机台机构动作逻辑设计,在掰动活动夹爪226夹紧探头组件11之后,固定气缸216才可以拉动限位滑块214到最高位置,避免探头组件没有装夹到位;在固定气缸216才可以拉动限位滑块214到最高位置漏出废气罩111之后,激光焊接头234才可以发出激光进行焊接,避免激光破坏限位套管215和探头组件11。
53.以上内容是结合具体的优选实施方式对本实用新型所作的进一步详细说明,不能认定本实用新型的具体实施只局限于这些说明。对于本实用新型所属技术领域的技术人员来说,在不脱离本实用新型构思的前提下,还可以做出若干等同替代或明显变型,而且性能或用途相同,都应当视为属于本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。