1.本发明涉及智能炒菜机技术领域,具体涉及一种智能炒菜机搅拌机构、智能炒菜机及其搅拌轨迹获取方法。
背景技术:
2.餐饮业的成本尤其是厨师的成本占据了总成本中相当大的比重,从而在一定程度上制约了餐饮业品质和服务的进一步提升和壮大,同时由于厨师的体力劳动强度大,长时间工作后容易患上肩周炎、腰肌劳损等厨师职业病。为此,一款能够缩减人力,降低人工成本,提升出品速度,改善厨师工作环境,节约能源,味道一致的炒菜机可以有效的改善上述问题。其中,炒菜机能自动炒、煎、烹、炸、爆、焖、蒸、煮、烙、炖、煲等功能,轻松实现了做饭过程的自动化和趣味化。
3.现有技术中,炒菜机在翻炒过程中,需要通过搅拌机构不断对锅胆内的食材不断搅拌,以使锅胆内食材均匀受热及混合均匀。炒菜机搅拌机构通常通过一个电机带动搅拌铲同时自转和公转,搅拌铲的自转与公转的转速比是固定不变的,使得搅拌铲在锅胆内的搅拌轨迹是固定不变的,无法根据菜品类型实现搅拌铲不同的搅拌轨迹,导致菜品口感及质量不佳。
技术实现要素:
4.本发明提供一种智能炒菜机搅拌机构,旨在解决现有技术的炒菜机搅拌机构存在搅拌铲的搅拌轨迹固定不变,无法根据菜品类型实现搅拌铲不同的搅拌轨迹,导致菜品口感及质量不佳的问题。
5.本发明是这样实现的,提供一种智能炒菜机搅拌机构,包括:
6.架体;
7.设于所述架体的第一电机,所述第一电机具有第一输出轴;
8.设于所述架体的第二电机,所述第二电机具有第二输出轴;
9.控制装置,分别与所述第一电机及所述第二电机电连接;
10.与所述第一输出轴传动连接的旋转件;
11.用于伸入锅胆内并与所述锅胆底面配合的搅拌铲,所述搅拌铲可转动连接在所述旋转件上并与所述第二输出轴传动连接,所述第一输出轴可驱动所述旋转件旋转以带动所述搅拌铲公转,所述第二输出轴可带动所述搅拌铲相对所述旋转件自转。
12.优选的,还包括:
13.设于所述架体的齿轮组,所述第一输出轴通过所述齿轮组与所述旋转件形成传动连接。
14.优选的,还包括:
15.可转动连接在所述旋转件上的万向轴,所述万向轴一端与所述搅拌铲连接,另一
端直接与所述第二输出轴连接,以使所述第二输出轴通过所述万向轴带动所述搅拌铲相对所述旋转件自转。
16.优选的,还包括:
17.用于伸入所述锅胆内并与所述锅胆侧表面配合的侧刮铲,所述侧刮铲连接于所述旋转件,所述旋转件可带动所述侧刮铲公转。
18.优选的,还包括:
19.连接所述万向轴与所述搅拌铲的固定臂,所述搅拌铲与所述固定臂通过螺纹形成可拆卸连接;以及
20.可移动设置于所述固定臂上的止转件,所述止转件可沿所述固定臂移动至与所述搅拌铲配合固定,以阻止所述搅拌铲相对所述固定臂转动。
21.优选的,所述搅拌铲包括搅拌铲臂、及与所述搅拌铲臂连接并用于与所述锅胆底面配合的搅拌铲体;所述固定臂的一端设有螺纹端,所述搅拌铲臂设有与所述螺纹端配合的螺纹孔,所述螺纹端插入所述螺纹孔并与所述螺纹孔螺纹连接。
22.优选的,所述搅拌铲臂的一端设有与所述螺纹孔同轴设置的定位孔,所述螺纹端穿过所述定位孔并与所述螺纹孔螺纹连接,所述止转件可沿所述固定臂移动至所述定位孔内并与所述定位孔配合,以限制所述止转件相对所述搅拌铲臂转动。
23.优选的,所述止转件设有内孔,所述止转件通过所述内孔活动套设于所述固定臂上;所述固定臂上设有与所述内孔配合的限位凸起,所述止转件移动至与所述搅拌铲臂配合固定时,所述止转件的所述内孔与所述限位凸起形成配合,以限制所述止转件相对所述固定臂转动。
24.优选的,还包括套设于所述固定臂的弹性件,所述弹性件一端与所述止转件抵接,另一端与所述固定臂上的定位件抵接。
25.优选的,所述搅拌铲的所述搅拌铲臂与竖直方向呈0~45
°
夹角设置。
26.优选的,所述万向轴包括依次设置的多个万向节,相邻两个所述万向节通过连接轴连接,且相邻两个所述连接轴互成夹角设置;所述万向轴一端的一个所述万向节直接与所述第二输出轴连接,所述万向轴另一端的一个所述万向节与所述固定臂连接。
27.优选的,所述万向轴包括依次设置的第一万向节、第二万向节及第三万向节,所述第一万向节与所述第二万向节通过第一连接轴连接,所述第二万向节与第三万向节通过第二连接轴连接,所述第一万向节直接与所述第二输出轴连接,所述第三万向节与所述固定臂连接;所述输出轴沿水平方向设置,所述第一连接轴、所述第二连接轴及所述固定臂连接之间依次互成夹角设置,且所述固定臂与竖直方向呈夹角设置。
28.优选的,还包括:
29.固定于所述架体上的支撑座,所述支撑座安装有支撑轴承,所述第一连接轴穿过所述支撑轴承并与所述支撑轴承形成配合。
30.优选的,还包括固定于所述旋转件上的支撑件,所述固定臂穿过所述支撑件,所述定位件与所述支撑件的靠近所述搅拌铲体的一侧抵接,以使所述支撑件在搅拌铲的所述搅拌铲体受到所述锅胆的作用力时向所述固定臂提供反向作用力。
31.本发明还提供一种智能炒菜机,包括:
32.锅胆;以及
33.上述的智能炒菜机搅拌机构。
34.本发明还提供了一种智能炒菜机搅拌轨迹的获取方法,应用于上述所述的智能炒菜机,包括以下步骤:
35.确定对所述智能炒菜机的搅拌轨迹的获取需求;
36.根据所述获取需求调整所述智能炒菜机搅拌机构的转动参数;
37.根据调整后的所述转动参数控制所述智能炒菜机搅拌机构转动;以及
38.输出所述智能炒菜机搅拌机构转动后形成的搅拌轨迹。
39.优选地,所述智能炒菜机搅拌机构的转动参数包括所述搅拌铲的自转转速,所述根据所述获取需求调整所述智能炒菜机搅拌机构的转动参数的步骤,包括步骤:
40.根据所述获取需求调整所述搅拌铲的自转转速;
41.所述根据调整后的所述转动参数控制所述智能炒菜机搅拌机构转动的步骤,包括步骤:
42.根据调整后的所述自转转速控制所述搅拌铲转动;
43.所述输出所述智能炒菜机搅拌机构转动后形成的搅拌轨迹的步骤,包括步骤:
44.输出所述搅拌铲转动后形成的搅拌轨迹。
45.优选地,所述根据获取需求调整所述搅拌铲的自转转速的步骤,包括步骤:
46.根据获取需求调整所述第二电机的第二输出功率;以及
47.根据所述第二输出功率调整所述搅拌铲的自转转速。
48.优选地,所述搅拌铲的自转转速的范围为:5~500rpm。
49.优选地,所述智能炒菜机搅拌机构的转动参数包括所述搅拌铲的公转转速,所述根据所述获取需求调整所述智能炒菜机搅拌机构的转动参数的步骤,还包括步骤:
50.根据所述获取需求调整所述搅拌铲的公转转速;
51.所述根据调整后的所述转动参数控制所述智能炒菜机搅拌机构转动的步骤,还包括步骤:
52.根据调整后的所述公转转速控制所述搅拌铲转动;
53.所述输出所述智能炒菜机搅拌机构转动后形成的搅拌轨迹的步骤,还包括步骤:
54.输出所述搅拌铲转动后形成的搅拌轨迹。
55.优选地,所述根据获取需求调整所述搅拌铲的公转转速的步骤,还包括步骤:
56.根据获取需求调整所述第一电机的第一输出功率;以及
57.根据所述第一输出功率调整所述搅拌铲的公转转速。
58.优选地,所述智能炒菜机搅拌机构的转动参数包括所述搅拌铲的搅拌角度,所述根据所述获取需求调整所述智能炒菜机搅拌机构的转动参数的步骤,还包括步骤:
59.根据所述获取需求调整所述搅拌铲的搅拌角度;
60.所述根据调整后的所述转动参数控制所述智能炒菜机搅拌机构转动的步骤,还包括步骤:
61.根据调整后的所述搅拌角度控制所述搅拌铲转动;
62.所述输出所述智能炒菜机搅拌机构转动后形成的搅拌轨迹的步骤,还包括步骤:
63.输出所述搅拌铲转动后形成的搅拌轨迹。
64.优选地,所述搅拌角度为所述搅拌铲与所述锅胆的锅口平面的中心点的垂直线所
形成夹角的角度。
65.优选地,所述搅拌角度满足公式:所述锅胆的半径*所述搅拌角度的正弦值=所述搅拌铲的宽度的一半。
66.优选地,所述确定对所述智能炒菜机的搅拌轨迹的获取需求的步骤,包括步骤:
67.确定对所述锅胆中食材的搅拌程度;以及
68.根据所述搅拌程度确定对所述智能炒菜机的搅拌轨迹的获取需求。
69.本发明提供的智能炒菜机搅拌机构通过设置第一电机与第二电机,通过第一电机的第一输出轴驱动旋转件旋转以带动搅拌铲公转,通过第二电机的第二输出轴带动搅拌铲相对旋转件自转,搅拌铲的自转与公转分别由不同电机带动,这样可以根据不同菜品或炒菜不同时间段控制第一电机与第二电机的工作转速,可以实现搅拌铲自转与公转任意转速比,从而方便根据不同菜品实现搅拌铲不同搅拌轨迹及不同的搅拌速度,实现智能炒菜,以达到更佳的烹饪效果,大大提升菜品的口感和质量。
附图说明
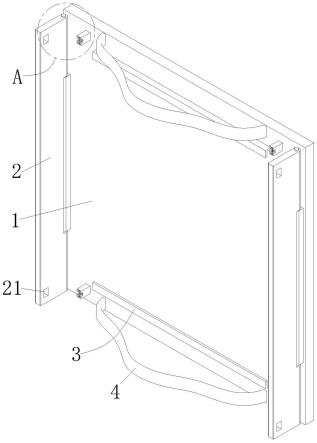
70.图1为本发明实施例提供的智能炒菜机搅拌机构与锅胆配合时的立体示意图;
71.图2为本发明实施例提供的智能炒菜机搅拌机构与锅胆的立体结构分解图;
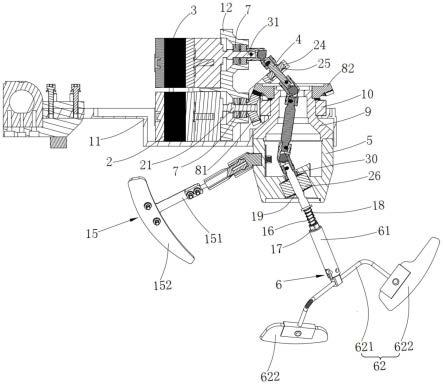
72.图3为本发明实施例提供的智能炒菜机搅拌机构去除罩体后的立体结构分解图;
73.图4为图3所示结构的剖面示意图;
74.图5为本发明实施例提供的智能炒菜机搅拌机构的搅拌铲与固定臂连接的结构示意图;
75.图6为图5所示结构的立体结构分解图;
76.图7为图5所示结构的剖面示意图;
77.图8为本发明实施例提供的智能炒菜机搅拌机构的部分结构的示意图;
78.图9为本发明实施例提供的智能炒菜机搅拌轨迹获取方法的流程示意图;
79.图10至图14为本发明实施例的智能炒菜机搅拌机构在锅胆内的搅拌轨迹的示意图;
80.图15至图18为本发明实施例提供的智能炒菜机搅拌轨迹获取方法的流程示意图;
81.图19为本发明实施例提供的智能炒菜机搅拌机构在锅胆内的搅拌轨迹的轨迹夹角的示意图;
82.图20为本发明实施例提供的智能炒菜机搅拌轨迹获取方法的流程示意图;
83.图21为本发明实施例提供的智能炒菜机的结构示意图;
84.图22与图23为本发明实施例提供的智能炒菜机搅拌轨迹获取方法的流程示意图。
具体实施方式
85.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
86.本发明实施例提供的智能炒菜机搅拌机构通过设置第一电机与第二电机,通过第一电机的第一输出轴驱动旋转件旋转以带动搅拌铲公转,通过第二电机的第二输出轴带动
搅拌铲在旋转件上自转,搅拌铲的自转与公转分别由不同电机带动,这样可以根据不同菜品或炒菜不同时间段控制第一电机与第二电机的工作转速,可以实现搅拌铲自转与公转任意转速比,从而方便根据不同菜品实现搅拌铲不同搅拌轨迹及搅拌速度,实现智能炒菜,以达到更佳的烹饪效果,大大提升菜品的口感和质量。
87.请参照图1-图4,本发明实施例提供智能炒菜机搅拌机构100,包括:
88.架体1;
89.设于架体1的第一电机2,第一电机2具有第一输出轴21;
90.设于架体1的第二电机3,第二电机3具有第二输出轴31;
91.控制装置(图未示),分别与第一电机2及第二电机3电连接;以及
92.与第一输出轴21传动连接的旋转件5;
93.用于伸入锅胆200内并与锅胆200底面配合的搅拌铲6,搅拌铲6可转动连接在旋转件5上并与第二输出轴31传动连接,第一输出轴21可驱动旋转件5旋转以带动搅拌铲6公转,第二输出轴31可带动搅拌铲6相对旋转件5自转。
94.作为本发明的一个实施例,架体1包括:
95.底板11;
96.设于底板11上的基座12,基座12设有上下分布的两个安装孔(未标号),第一输出轴21和第二输出轴31分别穿过对应的安装孔。其中,第一电机2和第二电机3呈上下支撑设置在底板11上,旋转件5可转动设置于底板11上。
97.作为本发明的一个实施例,基座12与底板11可以一体加工成型,也可以是分体式结构。
98.作为本发明的一个实施例,基座12上的两个安装孔内分别安装有第一轴承7,第一输出轴21和第二输出轴31分别与对应安装孔内的第一轴承7配合,确保第一输出轴21和第二输出轴31的稳定转动。
99.作为本发明的一个实施例,还包括设于架体1的齿轮组(未标号),第一输出轴21通过齿轮组与旋转件5形成传动连接。第一输出轴21利用齿轮组与旋转件5形成传动连接,实现第一输出轴21与旋转件5之间稳定传动,且便于更换不同齿轮调节旋转件5转速。
100.作为本发明的一个实施例,齿轮组包括与第一输出轴21连接的输入端齿轮81、及与输入端齿轮81啮合传动的输出端齿轮82,输出端齿轮82与旋转件5连接。
101.作为本发明的一个实施例,第一电机2工作时,第一电机2的第一输出轴21带动输入端齿轮81旋转,输入端齿轮81带动输出端齿轮82旋转,输出端齿轮82再带动旋转件5旋转,从而带动搅拌铲6公转。
102.作为本发明的一个实施例,输入端齿轮81和输出端齿轮82为伞齿,可以减小齿轮数量,而且便于该齿轮组的整体结构布局。除本实施例外,齿轮组的具体设置数量还可以根据实际需要进行设置。
103.作为本发明的一个实施例,智能炒菜机搅拌机构100还包括盖合在底板11上的罩体13,罩体13盖合在底板11,以将第一电机2、第二电机3、齿轮组进行密封,可以起到保护作用,使得产品外观美观。
104.作为本发明的一个实施例,还包括:
105.可转动设置于架体1上的连接件9,输出端齿轮82通过连接件9与旋转件5连接。
106.本实施例中,通过设置连接件9,便于输出端齿轮82与旋转件5的连接。其中,连接件9可以与旋转件5一体结构,也可以为分体结构。优选的,连接件9与旋转件5为分体结构,便于组装。除本实施例外,旋转件5也可以直接与输出端齿轮82连接。
107.具体的,架体1上固定设置有第二轴承10,连接件9的一端与第二轴承10配合并与输出端齿轮82连接,连接件9的另一端与旋转件5连接。
108.作为本发明的一个实施例,还包括万向轴4,万向轴4可转动连接在旋转件5上,万向轴4一端与搅拌铲6连接,另一端直接与第二输出轴31连接,第二输出轴31通过万向轴4带动搅拌铲6相对旋转件5自转。
109.本实施例中,搅拌铲6通过万向轴4实现与旋转件5形成可转动连接,以使搅拌铲6可以在旋转件5上自转;而且,万向轴4直接与第二输出轴31连接,无需齿轮组及行星齿轮进行传动,大大减少了齿轮传动部件,使智能炒菜机搅拌机构结构更加简单,方便组装,拆装维修方便,且节省成本,且由于减少了齿轮传动部件,零件少、结构简单、稳定性更好。
110.作为本发明的一个实施例,还包括设有旋转件5上的第三轴承14,万向轴4穿过第三轴承14,以使万向轴4可转动支撑于旋转件5上。
111.本发明实施例中,通过设置第一电机2与第二电机3,第一电机2的第一输出轴21通过齿轮组驱动旋转件5旋转,以带动搅拌铲6公转,第二输出轴31驱动万向轴4相对旋转件5旋转,以带动搅拌铲6自转,搅拌铲6公转与自转分别由不同的电机带动,控制装置可以根据菜品或炒菜不同时间段分别控制第一电机2与第二电机3对应的转速,可以实现搅拌铲6自转与公转任意转速比,从而可以根据不同菜品和炒菜过程中不同时段灵活设置搅拌铲6自转与公转速度比,大大提升菜品的口感及质量。
112.本发明实施例中,每个菜品类型与搅拌铲6的搅拌轨迹及搅拌速度相对应,不同的菜品类型对应不同的搅拌铲6的搅拌轨迹及搅拌速度,以确保每种菜品在烹饪过程中可以得到搅拌铲6最佳的搅拌效果,实现智能化炒菜。
113.其中,由于搅拌铲6在锅胆200内的搅拌轨迹由搅拌铲6自转与公转转速比决定,搅拌铲6的搅拌速度由搅拌铲6自转与公转转速决定,而搅拌铲自转与公转转速比及搅拌速度又是由第一电机2与第二电机3的转速决定,因此通过控制第一电机2与第二电机3分别按照对应的转速工作,即可实现搅拌铲6对应的搅拌轨迹及搅拌速度的调整,满足不同的菜品类型对搅拌铲6的不同搅拌轨迹及搅拌速度的需求,实现智能炒菜,达到更佳的烹饪效果,提升菜品的口感及质量。
114.在实际应用时,控制装置可以预先储存每个菜品与第一电机2及第二电机3的转速的对应关系,以实现相应的搅拌铲6的搅拌轨迹及搅拌速度的调整。其中,可以是人工选取菜品,控制装置根据菜品开始进行自动化炒菜,控制装置控制第一电机2与第二电机3按照对应的转速开始工作,实现搅拌铲6按照该菜品所需的搅拌轨迹及搅拌速度进行搅拌,实现智能化炒菜,提升菜品的口感及质量。
115.而且,在炒菜的过程中,不同时间段可以对应不同的搅拌铲6的搅拌轨迹及搅拌速度,在炒菜的不同时间段控制第一电机2与第二电机3均按照对应的转速进行工作,以使搅拌铲6在炒菜过程中的不同时间段实现不同的搅拌轨迹及搅拌速度,进一步实现智能化炒菜,进一步提升菜品的口感及质量。另外,也可以是在炒菜过程中根据需要人工利用控制装置手动控制第一电机2与第二电机3的转速,以根据需要灵活调节搅拌铲6的自转与公转转
速比。
116.例如,控制装置可以设置有按键或触摸屏,用户可以通过操作按键或触摸屏调节第一电机2与第二电机3的转速,从而手工调节搅拌铲6的自转转速及公转转速,达到所需搅拌铲6的自转与公转转速比,实现搅拌铲6相应的搅拌轨迹和搅拌速度。
117.作为本发明的一个实施例,还包括:
118.用于伸入锅胆200内并与锅胆200侧表面配合的侧刮铲15,侧刮铲15连接于旋转件5,旋转件5可带动侧刮铲15公转。
119.请参照图4,作为本发明的一个实施例,侧刮铲15包括侧刮铲臂151、及与侧刮铲臂151连接并用于与锅胆200侧表面配合的侧刮铲体152,侧刮铲臂151与旋转件5连接,侧刮铲15的侧刮铲臂151与竖直方向呈夹角设置。其中,侧刮铲15的侧刮铲臂151与竖直方向夹角可以根据实际进行设定。优选的,侧刮铲15的侧刮铲臂151与竖直方向呈45~90
°
夹角设置,可以确保侧刮铲体152良好的侧刮效果。例如,侧刮铲15的侧刮铲臂151与竖直方向的夹角可以为50
°
、60
°
、80
°
。
120.本实施例中,锅胆200的中心轴线与旋转件5的旋转轴线重合,搅拌铲6以锅胆200的中心轴线进行自转和公转,以实现食材搅拌;同时,侧刮铲15以锅胆200的中心轴线进行公转,以将锅胆200边缘的菜刮回锅内继续翻炒。
121.具体的,第一电机2的第一输出轴21通过齿轮组带动旋转件5旋转,从而带动搅拌铲6和侧刮铲15同时公转,第二电机3的第二输出轴31驱动万向轴4带动搅拌铲6自转,从而利用搅拌铲6的自转及搅拌铲6与侧刮铲15同时公转配合工作,进一步大大提升了翻炒效果。而且,由于侧刮铲15公转与搅拌铲6的自转采用不同电机驱动,可以实现搅拌铲6自转与搅拌铲6及侧刮铲15公转任意转速比,从而可以根据不同菜品和炒菜过程中不同时段灵活调节搅拌铲6自转与搅拌铲6及侧刮铲15公转速度比,提升菜品质量。
122.请结合参照图4-图7,作为本发明的一个实施例,还包括:
123.连接万向轴4与搅拌铲6的固定臂16,搅拌铲6与固定臂16通过螺纹形成可拆卸连接;以及
124.可移动设置于固定臂16上的止转件17,止转件17可沿固定臂16移动至与搅拌铲6配合固定,以阻止搅拌铲6相对固定臂16转动。
125.本实施例中,搅拌铲6与固定臂16通过螺纹形成可拆卸连接,从而可以通过转动搅拌铲6实现无极调节搅拌铲6的高度,可以根据实际需要灵活调节搅拌铲6的高度,确保搅拌铲6与锅胆200内表面紧密贴合,同时可以实现搅拌铲6的快速拆装,方便拆下搅拌铲6进行清洗,且便于更换新的搅拌铲6;而且,通过设置止转件17,在无需调节搅拌铲6高度或无需拆卸搅拌铲6时,可以将止转件17沿固定臂16移动至搅拌铲6配合固定,以阻止搅拌铲6相对固定臂16转动,以使搅拌铲6与固定臂16保持稳定连接,防止搅拌铲6在使用过程中移位造成脱落,同时确保搅拌铲6与锅胆200内表面紧密贴合。
126.作为本发明的一个实施例,搅拌铲6包括搅拌铲臂61、及与搅拌铲臂61连接并用于与锅胆200底面配合的搅拌铲体62;固定臂16的一端设有螺纹端161,搅拌铲臂61设有与螺纹端161配合的螺纹孔611,螺纹端161插入螺纹孔611并与螺纹孔611螺纹连接。
127.作为本发明的一个实施例,搅拌铲体62包括搅拌铲臂61连接的连接臂621及连接在连接臂621上的两个搅拌刀622,两个搅拌刀622用于与锅胆200底面配合。
128.本实施例中,固定臂16大致呈杆状结构,搅拌铲臂61大致呈筒状结构。固定臂16的螺纹端161设有外螺纹,螺纹孔611设有与外螺纹配合的内螺纹。螺纹端161插入螺纹孔611并通过外螺纹与螺纹孔611的内螺纹进行螺纹连接。除本实施例外,也可以是,搅拌铲臂61的一端设有螺纹端161,固定臂16设有与螺纹端161配合的螺纹孔611,螺纹端161插入螺纹孔611并与螺纹孔611螺纹连接。
129.作为本发明的一个实施例,搅拌铲臂61的一端设有与螺纹孔611同轴设置的定位孔612,螺纹端161穿过定位孔612并与螺纹孔611螺纹连接,止转件17可沿固定臂16移动至定位孔612内并与定位孔612配合,以限制止转件17相对搅拌铲臂61转动。
130.本实施例中,当搅拌铲臂61与固定臂16螺纹连接后,将止转件17沿固定臂16移动至搅拌铲臂61的定位孔612,止转件17与定位孔612形成配合,从而限制止转件17相对搅拌铲臂61转动,其实现结构简单,实现成本低。
131.作为本发明的一个实施例,止转件17的横截面为方形,定位孔612为与止转件17的横截面配合的方形孔。止转件17沿固定臂16移动至搅拌铲臂61的定位孔612内时,止转件17的外形与定位孔612形成配合,从而起到限制止转件17相对搅拌铲臂61转动的作用。
132.作为本发明的一个实施例,止转件17设有内孔171,止转件17通过内孔171活动套设于固定臂16上并可沿固定臂16的长度方向移动,方便止转件17的安装,且便于止转件17的移动操作。
133.作为本发明的一个实施例,固定臂16上设有与内孔171配合的限位凸起162,止转件17移动至与搅拌铲臂61配合固定时,止转件17的内孔171与限位凸起162形成配合,以限制止转件17相对固定臂16转动。
134.本实施例中,止转件17的内孔171为方形孔,限位凸起162为与止转件17的方形孔配合的方形凸起。
135.本实施例中,当止转件17移动至与搅拌铲臂61配合固定时,止转件17与搅拌铲臂61上的定位孔612配合,同时止转件17的内孔171与限位凸起162形成配合,使搅拌铲臂61、止转件17均不能相对固定臂16转动,从而实现搅拌铲6与固定臂16的稳定连接。
136.作为本发明的一个实施例,还包括套设于固定臂16的弹性件18,弹性件18一端与止转件17抵接,另一端与设置在固定臂16上的定位件19抵接。
137.本实施例中,通过设置弹性件18,利用弹性件18对止转件17提供弹力,使止转件17与定位孔612保持稳定配合,防止该止转件17脱离与搅拌铲臂61的配合,使搅拌铲6与固定臂16稳定连接;在需要转动搅拌铲臂61调节搅拌铲6高度时,用户可以将止转件17沿固定臂16从定位孔612移出并推压弹性件18,完成搅拌铲6高度调节后,用户松手后,止转件17又可以在弹性件18驱动作用下移动至与定位孔612重新配合,搅拌铲6高度调节操作十分简单。
138.作为本发明的一个实施例,弹性件18具体可以为弹簧或压簧。
139.作为本发明的一个实施例,定位件19为一体成型于固定臂16上的凸起或套设固定于固定臂16上的挡圈。
140.本实施例中,定位件19可以为一体成型于固定臂16上的环形凸起,无需进行定位件19与固定臂16的组装,便于搅拌铲6的组装。定位件19也可以是套设固定于固定臂16上的挡圈,方便固定臂16的加工。其中,本发明的附图示出的定位件19为套设固定于固定臂16上的挡圈。
141.本发明的其它实施例中,侧刮铲15也可以设置另一固定臂与旋转件5连接,侧刮铲15与该固定臂通过螺纹形成可拆卸连接,以根据实际需要灵活调节侧刮铲15的高度,确保侧刮铲15与锅胆200内表面紧密贴合,同时可以实现侧刮铲15的快速拆装,方便拆下侧刮铲15进行清洗,且便于更换新的侧刮铲15。其中,侧刮铲15与另一固定臂的连接结构与上述搅拌铲6与固定臂的连接结构相同,在此不再赘述。
142.请参照图3-图8,作为本发明的一个实施例,万向轴4包括依次设置的多个万向节,相邻两个万向节通过连接轴连接,且相邻两个连接轴互成夹角设置;万向轴4一端的一个万向节直接与第二输出轴31连接,万向轴4另一端的一个万向节与固定臂16连接。通过将万向轴4设置成多个万向节,相邻两个万向节之间通过连接轴连接,便于改变第二输出轴31输出的驱动力的传递方向,使得搅拌铲6的搅拌铲臂61可以与竖直方向呈夹角进行结构布局;同时,便于实现万向轴4带动搅拌铲6自转,且便于实现搅拌铲6以旋转件4的旋转轴线为中心轴线作圆锥形的公转。
143.作为本发明的一个实施例,万向轴4包括依次设置的第一万向节41、第二万向节42及第三万向节43,第一万向节41与第二万向节42通过第一连接轴44连接,第二万向节42与第三万向节43通过第二连接轴45连接,第一万向节41直接与第二输出轴31连接,第三万向节43与固定臂16连接;第二输出轴31沿水平方向设置,第一连接轴44、第二连接轴45及固定臂16依次互成夹角设置,且固定臂16与竖直方向呈夹角设置,以使搅拌铲6的搅拌铲臂61与竖直方向呈夹角设置。
144.本实施例中,第一连接轴44与第二连接轴45呈一定夹角设置,第二连接轴45与固定臂16呈一定夹角设置,且第一连接轴44与第二连接轴45呈一定夹角设置。第二电机3的第二输出轴31依次通过第一万向节41、第一连接轴44、第二万向节42、第三万向节43及固定臂16向搅拌铲6的搅拌铲臂61传递动力,以实现搅拌铲6的自转。
145.通过将万向轴4设置成三个万向节,相邻两个万向节之间通过连接轴连接,确保万向节数量较少,使万向轴4结构较为简单,同时可以实现万向轴4带动搅拌铲6自转,同时便于实现搅拌铲6以旋转件4的旋转轴线为中心轴线作圆锥形的公转。而且,该万向轴4的结构便于改变第二输出轴31输出的驱动力的传递方向,使得搅拌铲6的搅拌铲臂61可以根据需要与竖直方向呈预设夹角进行结构布局。除本实施例外,第三万向节43也可以是直接与搅拌铲6的搅拌铲臂61连接。万向轴4的万向节的数量也可以为四个或四个以上,相邻两个万向节之间通过连接轴连接。
146.本实施例中,搅拌铲6的搅拌铲臂61与竖直方向呈夹角设置,且搅拌铲6的搅拌铲臂61与竖直方向夹角可以根据实际进行设定。优选的,搅拌铲6的搅拌铲臂61与竖直方向的夹角为0~45
°
,可以确保搅拌铲6的搅拌铲体62良好的搅拌效果。例如,搅拌铲6的搅拌铲臂61与竖直方向的夹角可以为20
°
、25
°
、30
°
。
147.请结合参照图4-图7,作为本发明的一个实施例,还包括:
148.固定于架体1上的支撑座24,支撑座24安装有支撑轴承25,第一连接轴44穿过支撑轴承25并与支撑轴承25形成配合。其中,支撑轴承25为圆柱滚子轴承。
149.本实施例中,利用第一连接轴44与支撑轴承25形成配合,实现第一连接轴44限位,防止第一连接轴44在转动过程中出现晃动,进而防止万向轴4在转动过程中整体出现晃动。
150.作为本发明的一个实施例,还包括固定于旋转件4上的支撑件26,固定臂16穿过支
撑件26,且定位件19与支撑件6的靠近搅拌铲6的搅拌铲体62的一侧抵接,以使支撑件26在搅拌铲6的搅拌铲体62受到锅胆200的作用力时向固定臂16提供反向作用力。
151.其中,支撑件26的具体结构不限,支撑件26可以是单个部件,也可以是一个组件。
152.本实施例中,当搅拌铲6的搅拌铲体62在锅胆200内搅拌时,搅拌铲6的搅拌铲体62与锅胆200底面接触会受到锅胆200的作用力,搅拌铲6的搅拌铲体62经搅拌铲臂61传递给固定臂16,而由于支撑件26与固定臂16上的定位件19形成抵接,支撑件26可以给固定臂16上的定位件19一个反作用力,从而可以防止锅胆200对搅拌铲6的搅拌铲体62的作用力传递到万向轴4,使万向轴4不受锅胆200对搅拌铲6的搅拌铲体62的作用力,从而提升万向轴4的使用寿命和传动精度。
153.作为本发明的一个实施例,还包括设于旋转件4上的第三轴承30,固定臂16穿过第三轴承30并与第三轴承30形成配合,以使万向轴4可转动设置于旋转件4上。利用固定臂16与第三轴承30形成配合,确保万向轴4实现稳定转动。其中,由于支撑件26可以给固定臂16一个反作用力,因而也可以避免锅胆200对搅拌铲体62的作用力传递到第三轴承30,使第三轴承30也不受作用力,进一步确保万向轴4可以绕第三轴承30稳定自转,可以确保第三轴承30的使用寿命。
154.请再次参照图1-图4,本发明实施例还提供一种智能炒菜机,包括:
155.锅胆200;以及
156.上述实施例的智能炒菜机搅拌机构100,智能炒菜机搅拌机构100位于锅胆200上方并伸入锅胆200内与锅胆200的底面配合。
157.本实施例中,智能炒菜机搅拌机构的搅拌铲6伸入锅胆200内并与锅胆200的底面配合,智能炒菜机搅拌机构的侧刮铲15伸入锅胆200内并与锅胆200的侧表面配合,通过第二电机3带动搅拌铲6自转,并通过第二电机3旋紧件5旋转,以带动搅拌铲6和侧刮铲15同时公转,利用搅拌铲6与侧刮铲15同时进行食材搅拌翻炒,大大提升了翻炒效果。
158.本发明实施例的智能炒菜机通过设置上述智能炒菜机搅拌机构100,由于智能炒菜机搅拌机构100的搅拌铲6公转与自转分别由不同的电机带动,可以根据不同菜品或炒菜不同时间段控制第一电机2与第二电机3的工作转速,可以实现搅拌铲6自转与公转任意转速比,从而方便根据不同菜品实现搅拌铲6不同搅拌轨迹及搅拌速度,实现智能炒菜,以达到更佳的烹饪效果,大大提升菜品的口感和质量。
159.请参阅图9,本发明实施例的智能炒菜机搅拌轨迹的获取方法,应用于上述的智能炒菜机,该方法包括以下步骤:
160.s1:确定对智能炒菜机的搅拌轨迹的获取需求;
161.s2:根据获取需求调整智能炒菜机搅拌机构的转动参数;
162.s3:根据调整后的转动参数控制智能炒菜机搅拌机构转动;以及
163.s4:输出智能炒菜机搅拌机构转动后形成的搅拌轨迹。
164.本发明实施例的智能炒菜机的搅拌轨迹获取方法中,搅拌轨迹的获取需求实际为烹饪过程中对菜品的搅拌/烹饪需求,基于获取需求来调整智能炒菜机搅拌机构100的转动参数,控制其以调整后的转动参数转动并输出搅拌轨迹,使得智能炒菜机搅拌机构100转动所形成的搅拌轨迹能够满足对菜品的搅拌/烹饪需求,达到更佳的烹饪效果。
165.进一步地,可根据搅拌轨迹将智能炒菜机准确地适配于某类菜品的烹饪,达到专
机专用以得到更佳烹饪效果的目的,也使得智能炒菜机的使用者和/或所有者无需再仅凭肉眼来判断搅拌轨迹,而能够更为清楚直观地掌握当前的搅拌轨迹以进行准确的操作,提升了智能炒菜机的智能化与可操作性。
166.本发明实施例中的控制装置用于执行上述搅拌轨迹获取方法,与智能炒菜机搅拌机构100转动相关的参数或数据,可手动输入或从云端下载于与控制装置连接的存储单元中存储。用户在使用智能炒菜机并需要获取搅拌轨迹时,通过与控制装置连接的智能炒菜机的按键或触摸屏,或与控制装置通信的外部终端来选择相关参数或数据,控制装置则以上述参数或数据控制智能炒菜机搅拌机构100转动,即可获取得到符合用户需求的搅拌轨迹。
167.在步骤s1中,获取需求可以为较密、较稀疏以及适中等不同程度的搅拌轨迹,示例性地:某些菜品需要充分的包裹汁液,此时需要较密的搅拌,则对智能炒菜机搅拌轨迹的获取需求则为较密需求;某些菜品可能易碎,此时仅需要较稀疏的搅拌,则对智能炒菜机搅拌轨迹的获取需求则为较稀疏需求。至于对于菜品具体的搅拌需求,则可由智能炒菜机烹饪过的菜品来反馈,或是智能炒菜机所存储的食谱来反映。
168.在一个实施例中,食谱中设定有控制智能炒菜机运行的烹饪参数,如火力大小、烹饪时间、加料时间与烹饪方式等,并且,烹饪参数可进一步带有对当前食材的搅拌需求,如搅拌方向、搅拌时间或次数等,在本发明实施例中,搅拌需求还可包括搅拌轨迹,即烹饪食谱中的菜品采用对应的搅拌轨迹来进行,实现菜品与搅拌轨迹的对应与适配,达到较佳的烹饪效果。
169.由于对锅胆200中食材的搅拌由智能炒菜机搅拌机构100的转动来完成,因此,在步骤s2中,在确定获取需求后,可基于获取需求来调整智能炒菜机搅拌机构100的转动参数,以达到调整对食材搅拌效果的目的。在本发明实施例中,影响智能炒菜机搅拌轨迹的因素为智能炒菜机搅拌机构100的转动参数,因此通过针对性地调整搅拌铲6的转动参数,即能够调整、改变智能炒菜机的搅拌轨迹。转动参数即为影响智能炒菜机搅拌机构100的转动的参数,如智能炒菜机搅拌机构100的转速(自转转速、公转转速)、转动角度等。
170.在本发明实施例中,虽然通过调整转动参数即可达到调整智能炒菜机搅拌机构100转动时所形成的搅拌轨迹的目的,但不同的转动参数对搅拌轨迹的影响是不同的,因此需要根据不同的实际获取需求来进行准确、合理的选择,使得智能炒菜机搅拌机构100在转动参数调整后转动所形成的搅拌轨迹能够符合用户需求,即智能炒菜机搅拌机构100对菜品的搅拌能够符合用户需求或符合菜品的烹饪要求。
171.根据调整后的转动参数控制智能炒菜机搅拌机构100转动,并将其转动后形成的搅拌轨迹输出,用户即可清楚、直观地掌握搅拌轨迹的实际情况,并将所输出的搅拌轨迹实际应用于菜品的烹饪中。搅拌轨迹的输出方式如可以在智能炒菜机的显示屏上显示,用户可通过显示屏直接查看搅拌轨迹的形态,或是还可以推送至与智能炒菜机通信的用户终端,如此,即使用户不在智能炒菜机的附近,也可及时地掌握搅拌轨迹的实际情况,便于远程控制。
172.更多地,在一个实施例中,还可将每次调整后的转动参数与对应输出的搅拌轨迹形成对应的图表,并存储于智能炒菜机的存储单元中或存储于云端上,如此,当后续还需要调整转动参数时,若是检测发现图表中存在当前需要调整的转动参数,则无需再次进行计
算与调整,直接控制智能炒菜机搅拌机构100转动并将对应的搅拌轨迹输出即可,降低智能炒菜机需要做的计算工作,提升使用效率。
173.示例性地,在本发明实施例的智能炒菜机搅拌轨迹的获取方法的一个应用场景中,用户在智能炒菜机的按键或触摸屏、或外部终端输入自身对搅拌轨迹的获取需求,获取需求具体可如需要获取较密集的、较稀疏的或一般默认的搅拌轨迹,以及具体的密集程度、稀疏程度或者默认程度等。
174.控制装置确定获取需求的具体内容并进行分析计算,确定具体需要调整的智能炒菜机搅拌机构100的转动参数以及转动参数调整的具体数值,如可能较密集的搅拌轨迹需要调大转动参数,为达到要求的密集程度需要调大多少的转动参数,或较稀疏的搅拌轨迹需要调小转动参数,为达到要求的稀疏程度需要调小多少的转动参数等。控制装置在确定对转动参数的调整方式与需要调整的数值后,以调整后的转动参数控制智能炒菜机搅拌机构转动,此时,所形成的搅拌轨迹即与用户的获取需求对应,也与菜品的烹饪需求(要求)对应,进而能够实现对菜品的较佳烹饪。
175.本发明实施例中的搅拌铲6(即两个搅拌刀622)自转与公转所形成的搅拌轨迹如图10至图14所示呈螺旋状均匀地变化,类似于花瓣的形状,能够达到对锅胆200内的食材充分地、均匀地搅拌的目的,搅拌轨迹外圈的圆形则由侧刮铲15公转形成,对食材的运动进行限制。
176.更多地,搅拌铲6在锅胆200中转动所形成的搅拌轨迹具有最远点,即两个搅拌刀622在锅胆200中的运动具有最大范围,并且搅拌轨迹的中心部分、密集部分还靠近于锅胆200在竖直方向的投影面的圆心(锅心),即搅拌铲6在锅胆200相对中心部分的转动更为密集,使得堆积于锅胆200相对中心部位的食材能够被充分地搅拌分开,受热更为均匀。
177.值得注意的是,本发明实施例中的智能炒菜机搅拌轨迹主要由搅拌铲6在锅胆200中的自转加公转形成,搅拌铲6的自转加公转对烹饪效果产生主要影响。虽然侧刮铲15也在锅胆200中转动,但其公转所形成的轨迹为沿锅胆200边沿的圆形,主要作用为将被搅拌铲6搅拌至锅胆200边沿的食材刮回到锅胆200相对中部的位置,而不会对锅胆200中部堆积的食材造成过大影响。但侧刮铲15的覆盖范围影响了锅胆200中食材能够运动的范围,因此,有关侧刮铲15的一些参数对烹饪效果仍然会产生一定影响。
178.请参阅图15,在本发明实施例中,智能炒菜机搅拌机构100的转动参数包括搅拌铲6的自转转速,步骤s2包括步骤:
179.s21:根据获取需求调整搅拌铲的自转转速;
180.步骤s3包括步骤:
181.s31:根据调整后的自转转速控制搅拌铲转动;
182.步骤s4包括步骤:
183.s41:输出搅拌铲转动后形成的搅拌轨迹。
184.具体地,在本发明实施例中,由于对锅胆200中食材的搅拌主要由搅拌铲6的转动来完成,因此,在确定对搅拌轨迹的获取需求后,可基于获取需求来调整搅拌铲6的转动参数,以达到调整对食材搅拌效果的目的。而搅拌铲6的转动包括公转与自转,因此在智能炒菜机搅拌机构100的转动参数中,搅拌铲6的自转转速为影响其所形成的搅拌轨迹的主要因素之一,即为影响智能炒菜机的烹饪效果的主要因素之一,若想要调整智能炒菜机搅拌轨
迹,调整搅拌铲6的自转转速为最直接有效的办法之一。
185.因此,在实际使用智能炒菜机时,在控制装置确定了对搅拌轨迹的获取需求后(如接收到用户通过按键、触摸屏或外部终端输入的代表着获取需求的控制指令),即确定了对菜品的烹饪要求后,具体地基于获取需求来调整搅拌铲6的自转转速,根据调整后的自转转速控制搅拌铲6的自转,此时搅拌铲6的公转转速虽然未发生变化,但搅拌铲6的自转加公转的共同转动也能够满足获取需求,即搅拌铲6所输出的搅拌轨迹符合对菜品的烹饪要求。
186.请参阅图16,在本发明实施例中,步骤s21包括步骤:
187.s211:根据获取需求调整第二电机的第二输出功率;以及
188.s212:根据第二输出功率调整搅拌铲的自转转速。
189.具体地,由于本发明实施例中的搅拌铲6的自转由第二电机3直接驱动实现,而并未通过齿轮组来传动,即搅拌铲6的自转转速由第二电机3的第二输出功率直接决定,而不受其他结构的影响。因此,可直接通过调整第二电机3的第二输出功率来达到调整搅拌铲6的自转转速的目的。在本发明实施例中,调整第二电机3的第二输出功率的方式可以为直接调整其电流和/或电压,如此即可简单、直接地实现对第二输出功率的调整。
190.可以理解,调整第二电机3的转速同样可以调整搅拌铲6的自转转速,但调整第二电机3的转速同样是通过调整其第二输出功率来实现,因此,调整第二电机3的转速与调整其第二输出功率可做相同理解。
191.示例性地,当用户使用智能炒菜机对食材进行烹饪时,先确定了自身当前对搅拌轨迹的获取需求,通过按键、触摸屏或外部终端选择对搅拌轨迹的获取需求并向控制装置发送代表该获取需求的指令,控制装置根据所接收到的指令即可确定当前的获取需求,而后根据获取需求来计算当前需要调整的搅拌铲6的自转转速,进一步根据自转转速的调整情况来调整第二电机3的第二输出功率,如此,搅拌铲6即以调整后的自转转速转动,所形成、输出的搅拌轨迹即与获取需求对应。
192.在本发明实施例中,搅拌铲6的自转转速的范围为:5~500rpm。
193.具体地,通过将搅拌铲6的自转转速设定为上述范围,可满足搅拌铲6的正常转动,并且,上述自转转速范围足够的大,即搅拌轨迹能够调整的范围足够大,使得搅拌铲6的转动更易于满足用户对搅拌轨迹的获取需求。
194.在一个较佳的实施例中,搅拌铲6的自转转速的范围为20~200rpm。
195.如此,一方面可避免因搅拌铲6的自转转速太慢影响其对菜品的搅拌,而进一步影响智能炒菜机的烹饪效率。另一方面,还可避免因搅拌铲6的自转转速过快而增加智能炒菜机的结构负担,也导致搅拌铲6的损耗加快,搅拌铲6在此自转转速范围内调整后所输出的搅拌轨迹,也能够适配大多数的获取需求。
196.请参阅图17,在本发明实施例中,智能炒菜机搅拌机构100的转动参数包括搅拌铲6的公转转速,步骤s2还包括步骤:
197.s22:根据获取需求调整搅拌铲的公转转速;
198.步骤s3还包括步骤:
199.s32:根据调整后的公转转速控制搅拌铲转动;
200.步骤s4还包括步骤:
201.s42:输出搅拌铲转动后形成的搅拌轨迹。
202.具体地,在本发明实施例中,由于对锅胆200中食材的搅拌主要由搅拌铲6的转动来完成,因此,在确定对搅拌轨迹的获取需求后,可基于获取需求来调整搅拌铲6的转动参数,以达到调整对食材搅拌效果的目的。而搅拌铲6的转动包括公转与自转,因此在智能炒菜机搅拌机构100的转动参数中,搅拌铲6的公转转速为影响其所形成的搅拌轨迹的主要因素之一,即为影响智能炒菜机的烹饪效果的主要因素之一,若想要调整智能炒菜机搅拌轨迹,调整搅拌铲6的公转转速为最直接有效的办法之一,可以理解为与调整搅拌铲6的自转转速的并列方案。
203.因此,在实际使用智能炒菜机时,在控制装置确定了对搅拌轨迹的获取需求后(如控制装置接收到用户通过按键、触摸屏或外部终端输入的代表着获取需求的控制指令),即确定了对菜品的烹饪要求后,具体地基于获取需求来调整搅拌铲6的公转转速,根据调整后的公转转速控制搅拌铲6的公转,此时搅拌铲6的自转转速虽然未发生变化,但搅拌铲6的自转加公转的共同转动也能够满足获取需求,即搅拌铲6所输出的搅拌轨迹符合对菜品的烹饪要求。
204.值得注意的是,由于搅拌铲6与侧刮铲15同步公转,且均由第一电机2驱动转动,因此,调整侧刮铲15的公转转速也可达到调整智能炒菜机搅拌轨迹的目的,也就是说,智能炒菜机搅拌机构100的转动参数还可包括侧刮铲15的公转转速,但调整侧刮铲15的公转转速实际上等同于调整搅拌铲6的公转转速,因此,本发明实施例中不对调整侧刮铲15的公转转速做过多描述,将侧刮铲15的公转转速与搅拌铲6的公转转速做等同理解即可。
205.请参阅图18,在本发明实施例中,步骤s22包括步骤:
206.s221:根据获取需求调整第一电机的第一输出功率;以及
207.s222:根据第一输出功率调整搅拌铲的公转转速。
208.具体地,由于本发明实施例中的搅拌铲6的公转由第一电机2驱动实现,因此,可直接通过调整第一电机2的第一输出功率来达到调整搅拌铲6的公转转速的目的。在本发明实施例中,调整第一电机2的第一输出功率的方式可以为直接调整其电流和/或电压,如此即可简单、直接地调整第一输出功率。可以理解,调整第一电机2的转速同样可以调整搅拌铲6的公转转速,但调整第一电机2的转速同样是通过调整其第一输出功率来实现,因此,调整第一电机2的转速与调整其第一输出功率可做相同理解。
209.示例性地,当用户使用智能炒菜机对食材进行烹饪时,先确定了自身当前对搅拌轨迹的获取需求,通过按键、触摸屏或外部终端选择对搅拌轨迹的获取需求并向控制装置发送代表该获取需求的指令,控制装置根据所接收到的指令即可确定当前的获取需求,而后根据获取需求来计算当前需要调整的搅拌铲6的公转转速,进一步根据公转转速的调整情况来调整第一电机2的第一输出功率,如此,搅拌铲6即以调整后的公转转速转动,所形成、输出的搅拌轨迹即与获取需求对应。
210.综上可知,在本发明实施例中,影响智能炒菜机的搅拌轨迹的因素主要为搅拌铲6的自转转速与公转转速,更具体为自转转速相对公转转速的比值,即为自转转速/公转转速所得到的转速比,当上述转速比改变时,搅拌轨迹的疏密程度也会随之改变。
211.因此,通过针对性地调整搅拌铲6的自转转速和/或公转转速以调整两者的转速比,即能够调整搅拌轨迹的疏密程度,也即是说,通过调整第一电机2的第一输出功率和/或第二电机3的第二输出功率,即可实现对搅拌轨迹的调整。但值得注意的是,搅拌铲6的自转
转速与公转转速不能等比地调整,若是等比调整则转速比并不会改变,不能达到调整搅拌轨迹的目的。
212.值得一提的是,在本发明实施例中,通过自转转速与公转转速等转速参数实现对搅拌轨迹的调整改变,应理解为搅拌轨迹的疏密程度的调整改变,而并非是搅拌轨迹的形状的调整改变。而若是调整搅拌铲6的结构参数,如铲体62的角度与位置等参数,则可调整改变搅拌轨迹的形状,即若是搅拌铲6的结构是固定不变的,那搅拌轨迹的形状也是固定不变的。
213.更进一步地,请参阅图19,在本发明实施例中,搅拌轨迹在锅胆200上具有多个距离锅胆200的圆心最远的最远点,锅胆200的圆心a和其中一个最远点b的第一连线l1,与圆心a和另一个最远点c的第二连线l2之间,构成影响搅拌轨迹的轨迹夹角α,上述其中一个最远点a与另一个最远点b相邻。
214.请结合图10至图14所示,本发明实施例中的搅拌轨迹由搅拌铲6在锅胆200表面划过后所形成的一条条曲线组成,搅拌铲6做螺旋状的周期自转运动,使得搅拌轨迹中形成类似于“花瓣”状的图案。在本发明实施例中,将上述类似于“花瓣”的图案定义为子轨迹,相邻“花瓣”之间的距离用相邻子轨迹数量来衡量,而轨迹夹角α相当于相邻“花瓣”的轴线之间夹成的角,直接反映了相邻“花瓣”之间的距离,因此轨迹夹角α可以作为衡量搅拌轨迹的搅拌程度的最直接指标。
215.具体地,在搅拌轨迹一定的情况下,子轨迹数量越多、相邻子轨迹数量越少以及轨迹夹角α越小,搅拌轨迹越密集,搅拌程度越小,相反地,子轨迹数量越少、相邻子轨迹数量越多以及轨迹夹角α越大,搅拌轨迹越疏松,搅拌轨迹越大。在根据转速比得到子轨迹数量、相邻子轨迹数量以及轨迹夹角α后,即可根据子轨迹数量、相邻子轨迹数量以及轨迹夹角α对搅拌轨迹的影响,来确定当前智能炒菜机搅拌机构6所形成的搅拌轨迹,对锅胆200内食材的搅拌程度,以确定该智能炒菜机搅拌机构6所属的智能炒菜机最适合烹饪的食材。
216.但实际上,轨迹夹角α越小,相邻子轨迹之间越近,轨迹夹角α越大,相邻子轨迹α之间越远,因此,在一个实施例中,仅将轨迹夹角α用以评估搅拌程度的大小即可,子轨迹数量与相邻子轨迹数量可作为辅助理解。
217.更进一步地,自转转速与公转转速的比值与轨迹夹角α满足以下公式:轨迹夹角α=360
°
/(自转转速/公转转速)。
218.具体地,自转转速/公转转速实际上表示的为一个公转周期内出现的自转的周期数,即相当于搅拌铲6公转一圈的同时自转的圈数。而每一个自转周期中,会出现一次搅拌铲6的搅拌刀622偏离锅胆200圆心的达到最大值的位置,即上述的最远点。以上定义的轨迹夹角α为一个圆周内相邻两次出现最大值的出现次数,即出现两个相邻最远点的次数,因此采用以上公式进行计算。
219.值得一提的是,本发明实施例中:
220.当轨迹夹角α小于等于180
°
时,所形成的搅拌轨迹偏向于聚拢食材,即搅拌铲6的转动体现为聚拢效果,且轨迹夹角α越小,搅拌程度越大,聚拢效果越差,打散效果越好;
221.当轨迹夹角α大于180
°
时,所形成的搅拌轨迹偏向于打散食材,即搅拌铲6的转动体现为打散效果,且轨迹夹角α越大,搅拌程度越小,打散效果越差,聚拢效果越好;
222.当轨迹夹角α接近于180
°
时,搅拌程度适中,所形成的搅拌轨迹聚拢效果和打散效
果都较好,即搅拌铲6的转动既能够聚拢食材又能够打散食材。
223.更进一步地,在本发明实施例中,当自转转速/公转转速为整数时,子轨迹数等于自转转速/公转转速,相邻子轨迹数等于1;当自转转速/公转转速为分数时,子轨迹数等于分数的分子数,相邻子轨迹数等于分数的分母数。
224.示例性地:
225.请结合图10,若是自转转速/公转转速=5,即自转转速/公转转速=5时,夹角为360
°
/5=72
°
,即搅拌轨迹中的花瓣数(子轨迹数)为5,且两个花瓣(子轨迹)之间的距离较近,相当于仅间隔了一个花瓣(子轨迹)的距离范围,此时轨迹夹角α的数值较小,搅拌轨迹并不密集,搅拌程度较大,聚拢效果较差,打散效果较好;
226.请结合图11,若是自转转速/公转转速=2.5=5/2,即自转转速/公转转速=2.5=5/2时,轨迹夹角α为360
°
/2.5=144
°
,即搅拌轨迹中的花瓣数(子轨迹数)为5,两个花瓣(子轨迹)之间间隔了两个花瓣(子轨迹)的距离范围,此时轨迹夹角α的数值适中,搅拌轨迹密集程度适中,搅拌程度适中,聚拢效果适中,打散效果适中;
227.请结合图12,若是自转转速/公转转速=1.667=5/3,即自转转速/公转转速=1.667=5/3,轨迹夹角α为360
°
/1.667=216
°
,即搅拌轨迹中的花瓣数(子轨迹数)为5,两个花瓣(子轨迹)之间间隔了三个花瓣(子轨迹)的距离范围,此时轨迹夹角α的数值较大,搅拌轨迹密集程度适中,搅拌程度适中,聚拢效果适中,打散效果适中;
228.请结合图13,若是自转转速/公转转速=1.25=5/4,即自转转速/自转公转=1.25=5/4,轨迹夹角α为360
°
/1.25=288
°
,即搅拌轨迹中的花瓣数(子轨迹数)为5,两个花瓣(子轨迹)之间间隔了四个花瓣(子轨迹)的距离范围,此时轨迹夹角α的数值更加大,搅拌轨迹并不密集,搅拌程度较大,聚拢效果较好,打散效果较差;
229.请结合图14,其中,分别示出了搅拌轨迹中的花瓣数(子轨迹数)分别为2、3、4、7、10、12以及15个,轨迹夹角α分别为180
°
、120
°
、90
°
、51.425
°
、36
°
、30
°
以及24
°
时搅拌轨迹的具体形态,清楚地示出了自转转速/公转转速的调整对搅拌轨迹的实际改变,反映了对食材的搅拌程度的实际改变。
230.更进一步地,轨迹夹角α的范围为:30
°
~330
°
。
231.具体地,通过组合、调整搅拌铲6的自转转速与公转转速(组合、调整第一电机2的第一输出功率与第二电机3的第二输出功率),即可实现所得到的轨迹夹角α的变化与控制,将轨迹夹角α控制于上述范围内,能够形成的轨迹夹角α的范围足够大,即搅拌轨迹的不同形态足够多,以满足对搅拌轨迹更多样化的获取需求。
232.在搅拌轨迹与轨迹夹角α的实际应用方面,根据不同菜品需求得到的搅拌轨迹不同。例如烹饪蔬菜类,所需的搅拌程度较大,轨迹夹角α接近180
°
;又例如烹饪红烧肉、豆腐类,因为此类菜品需要带有混合酱汁,因此所需搅拌程度小,轨迹夹角α接近30
°
。
233.在一个较佳的实施例中,轨迹夹角α的范围为:72
°
~288
°
。
234.如此,可避免因轨迹夹角α过小,所形成的的搅拌轨迹过于密集导致食材未搅拌到位而导致烹饪效果不佳的问题,同时还避免因轨迹夹角α过大,导致所形成的搅拌轨迹过于疏松,而难以对锅胆200内所有的食材都进行有效搅拌的问题。并且,将轨迹夹角α控制于上述较佳范围内,还能够满足对搅拌轨迹大多数的获取需求。
235.更进一步地,在本发明实施例中,搅拌铲6的自转转速与公转转速的比值为:1.2~
30。
236.将转速比控制于上述范围内,不但能够控制搅拌铲6的自转转速与公转转速,使第一电机2的第一输出功率与第二电机3的第二输出功率能够在一个足够大的范围内进行调整,适应对搅拌轨迹更多的获取需求。
237.在一个较佳的实施例中,自转转速与公转转速的比值为:1.25~5。
238.将转速比控制于上述范围内,不但能够控制搅拌铲6的自转转速与公转转速,使得上述两者在一个合适的范围内进行调整,并且搅拌铲6以在此范围内调整的转速比转动并输出的搅拌轨迹,能够适应大部分的获取需求,满足大部分用户的需求,更为准确快速地满足用户需求。
239.作为本发明的一个实施例,当搅拌铲6自转转速和公转转速的转速比为定数时,即第一电机2与第二电机3的输出功率一定时,搅拌铲6的搅拌轨迹为固定形状轨迹,菜品在烹饪过程的不同时间段内,搅拌铲6都按照固定的形状轨迹运动,此适合烹饪不需要变化搅拌轨迹的菜品。当搅拌铲6自转转速和公转转速的转速比是变数时,即第一电机2与第二电机3的输出功率改变时,搅拌铲6的搅拌轨迹是不断变化的,菜品在烹饪过程中的不同时间段内,搅拌铲6会按照不同的形状轨迹运动,适合烹饪需要不断变化搅拌轨迹的菜品,从而可以更智能地炒不同的菜品,实现智能地炒菜,提升菜品质量及口感。
240.在本发明实施例中,请参阅图20,智能炒菜机搅拌机构100的转动参数还包括搅拌铲6的搅拌角度,步骤s2还包括以下步骤:
241.s23:根据获取需求调整搅拌铲的搅拌角度;
242.步骤s3还包括步骤:
243.s33:根据调整后的搅拌角度控制搅拌铲转动;
244.步骤s4还包括步骤:
245.s43:输出搅拌铲转动后形成的搅拌轨迹。
246.具体地,在本发明实施例中,搅拌角度β实际为搅拌铲6相对锅胆200的角度,为两个搅拌刀622相对锅胆200平面的角度,即为连接臂621与搅拌刀622的连接部分相对锅胆200平面的角度。搅拌角度β直接影响了搅拌铲6所形成的的搅拌轨迹是否经过锅胆200的中心,虽然并不会对搅拌轨迹的大致轮廓造成巨大的改变,但仍会存在一些影响。
247.因此,除了调整搅拌铲6来调整搅拌轨迹的具体形式外,还可通过调整搅拌铲6的搅拌角度β来调整搅拌轨迹,使得搅拌轨迹满足获取需求,例如:当需要对锅胆200中央区域的菜品进行更多的搅拌时,即可调小搅拌角度β,使得搅拌铲6更集中于锅胆200的中央区域搅拌;当不需要对锅胆200中央区域的菜品进行过多搅拌时,即可调大搅拌角度β,使得搅拌铲6不过多集中于锅胆200的中央区域搅拌。
248.在本发明实施例中,请参阅图21,搅拌角度β为搅拌铲6(两个搅拌刀622分别)与锅胆200的锅口平面的中心点的垂直线所形成夹角的角度。
249.具体地,从图21可以看出,上述搅拌角度β影响了搅拌铲6自转时所形成的搅拌轨迹在锅胆200相对中部位置的疏密程度,决定了搅拌轨迹是否经过锅胆200的锅中心,即决定了搅拌铲6对锅胆200相对中部位置的食材的搅拌效果,因此调整搅拌角度β可起到调整智能炒菜机的烹饪效果的目的。
250.在本发明实施例中,请继续参阅图21,搅拌角度β满足公式:锅胆200的半径r*搅拌
角度β的正弦值=搅拌铲6的宽度l的一半,即r*sinβ=(1/2)l,搅拌铲6的宽度的一半即为连接臂621与连接端61的连接部分的长度。
251.具体地,通过将搅拌角度β、锅胆200的半径r以及搅拌铲6的宽度的一半(1/2)l设计为满足上述公式,确保搅拌铲6中的两个搅拌刀622能够经过锅胆200的锅底中心点,实现对食材的有效翻炒,进一步地保证智能炒菜机的烹饪效果。更多地,智能炒菜机搅拌机构100的旋转中心与锅胆200的球心重合或接近重合,此时,搅拌铲6的最大长度与锅胆200的半径基本相等,使得搅拌铲6无论在锅胆200中转动至何处,都能够与锅胆200的表面保持贴合,保证对食材的搅拌效果。
252.更进一步地,请参阅图21与图22,智能炒菜机搅拌机构100的转动参数还包括侧刮铲15的搅拌角度δ,步骤s2还包括步骤:
253.s24:根据获取需求调整侧刮铲的搅拌角度;
254.步骤s3还包括步骤:
255.s34:根据调整后的搅拌角度控制侧刮铲转动;
256.步骤s4还包括步骤:
257.s44:输出侧刮铲随搅拌铲共同转动后形成的搅拌轨迹。
258.具体地,在本发明实施例中,侧刮铲15的搅拌角度δ实际为连接侧刮铲15的连接杆相对锅胆200平面的角度,为侧刮铲15与锅胆200的锅口平面的中心点的垂直线所形成夹角角度,侧刮铲15的搅拌角度δ直接影响了侧刮铲15转动时对锅胆200的覆盖范围,其虽然不会对搅拌轨迹的大致轮廓造成巨大的改变,但仍存在一些影响。
259.因此,除了调整搅拌铲6的转速来调整搅拌轨迹的具体形式外,还可通过调整侧刮铲15的搅拌角度δ来调整搅拌轨迹,使得搅拌轨迹满足获取需求,例如:当需要对锅胆200更为边缘的菜品进行更多的刮拌时,即可增大侧刮铲15的搅拌角度δ,使得侧刮铲15更偏向于锅胆200的边缘区域刮拌;当不需要对处于锅胆200的边缘区域的菜品进行过多刮拌时,即可调小侧刮铲15的搅拌角度δ,使得侧刮铲15更集中于锅胆200的中间区域刮拌。
260.在本发明实施例中,请参阅图23,步骤s1包括步骤:
261.s11:确定对锅胆中食材的搅拌程度;以及
262.s12:根据搅拌程度确定对智能炒菜机的搅拌轨迹的获取需求。
263.可以理解,搅拌轨迹的形态实际上反映了对锅胆200中食材的搅拌程度,因此,对搅拌轨迹的获取需求实际上是基于用户期望智能炒菜机搅拌机构100对食材的搅拌程度来给出的,或是由当前烹饪的食材的食谱设定的,因此若是用户在使用智能炒菜机烹饪菜品时,由用户或食谱确定了对食材的搅拌程度,则即可根据搅拌程度来确定对搅拌轨迹的获取需求。
264.在一个实施例中,可通过事先将不同的搅拌程度对应不同的获取需求,绑定存储于智能炒菜机的存储单元或与控制装置通信的云端中。示例性地,如可设定第一等级、第二等级与第三等级的搅拌程度,分别对应前文提到的较稀疏的、一般默认的以及较密集的搅拌轨迹的获取需求。如此,当用户使用智能炒菜机在某次烹饪中想要得到较稀疏的搅拌轨迹时,选择第一等级的搅拌程度即可;想要得到一般默认的搅拌轨迹时,选择第二等级的搅拌程度即可;想要得到较密集的搅拌轨迹时,选择第三等级的搅拌程度即可。
265.在本发明实施例的智能炒菜机搅拌轨迹的一个应用场景中,用户在使用智能炒菜
机对食材进行烹饪时,首先确定对锅胆200中食材所需的搅拌程度,如当前对食材需要用第一等级的搅拌程度进行搅拌烹饪,用户可通过智能炒菜机上的按键、触摸屏或与控制装置通信的外部终端,向控制装置发送控制指令或触发控制指令以选择第一等级的搅拌程度,控制装置再根据上述第一等级的搅拌程度得到对搅拌轨迹的获取需求为较稀疏的需求,然后,基于获取较稀疏的搅拌轨迹的需求,控制智能炒菜机搅拌机构100继续进行后续步骤,较为简单方便,能够提升智能炒菜机的工作效率。
266.在一个实施例中,用户可在智能炒菜机上选择食谱进行烹饪,食谱中设定有控制智能炒菜机运行的烹饪参数,如火力大小、烹饪时间、搅拌方向与时间等,并且,烹饪参数还带有对当前食材的搅拌程度,也即是说,用户选定了食谱的同时即确定了对锅胆200中食材的搅拌程度,也即确定了对智能炒菜机的搅拌轨迹的获取需求。
267.当智能炒菜机以所选择的食谱进行烹饪时,将会以食谱带有的搅拌程度所对应的获取需求,来调整智能炒菜机搅拌机构100的转动参数,智能炒菜机搅拌机构100以上述转动参数转动后输出的搅拌轨迹,即符合搅拌程度与获取需求,能够达到较佳的烹饪效果。
268.综上所述,在本发明实施例中,对智能炒菜机的搅拌轨迹的获取需求实际为烹饪过程中对菜品的搅拌(烹饪)需求,基于烹饪不同菜品时对智能炒菜机的搅拌轨迹的不同获取需求来调整控制第一电机2和/或第二电机3的工作参数,如第一输出功率与第二输出功率,使得搅拌铲6能够分别按照对应需要调整的自转转速和/或公转转速自转与公转,以输出对应的、符合获取需求的搅拌轨迹,达到更佳的烹饪效果。当需要调整搅拌轨迹的形状时,则可调整搅拌铲6的搅拌角度,输出更多形状的搅拌轨迹,满足用户更多不同的需求。
269.以上仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。