1.本发明属于机器人技术领域,特别涉及一种耦合自适应仿人欠驱动手的结构设计。
背景技术:
2.随着社会进步和科技发展,机器人技术在人们日常生活中的应用越来越广泛。机器人手作为机器人与外界接触并完成任务的执行部件,其性能直接影响到机器人抓取物体的执行效果和工作效率。多指灵巧手每个自由度均配备一个驱动器,传感器丰富,功能强大,但其结构复杂,质量和体积都比较大,控制困难,降低了机械手的灵活性和可控性,同时还增加了机械手的开发成本。
3.欠驱动机器人手可以克服多指灵巧手的一些不足,可利用较少的电机驱动较多的自由度关节,同时纯机械式的反馈系统无需复杂的传感器实时反馈也可以实现稳定抓取。欠驱动机器人手因体积小、重量轻、控制简单、制造与维护成本低等特点,越来越得到人们的重视。
4.机器人手抓取物体主要分为捏持和握持两种方式,捏持是用末端指尖夹取物体,而握持是用手指的多个指段包络物体。现实中需要一个通过指尖捏持物体,又能通过指段自适应包络物体的机器人手,以满足人们日常生活的需要。
技术实现要素:
5.本发明的目的在于克服上述缺陷,提供一种耦合自适应仿人欠驱动手,该手模仿人手结构,主要由5个手指和1个手掌组成。5个手指采用模块化设计,均采用齿轮传动机构、连杆机构、滚动齿轮齿条机构等机构组合传动,实现手指的耦合自适应的复合抓取功能。该手拇指具有3个关节,通过2个驱动器配合,可实现拇指的3个关节运动;食指、中指、无名指、小指结构相同,通过 1个驱动器可实现手指的3个关节转动。该手结构紧凑,抓取稳定,抓取范围广,可对不同形状尺寸的物体实现指尖捏持和指段包络抓持的功能,可用作智能机器人的末端执行器。
6.为实现上述发明目的,本发明提供如下技术方案:
7.一种耦合自适应仿人欠驱动手,包括1个手掌和5个欠驱动手指;
8.所述5个欠驱动手指分别为拇指、食指、中指、无名指和小指;
9.拇指包括拇指基座、拇指近指段、拇指中指段、拇指远指段、拇指第一驱动器和拇指第二驱动器;拇指第一驱动器用于驱动拇指近指段相对于拇指基座的转动,拇指第二驱动器用于驱动拇指中指段相对于拇指近指段的转动以及拇指远指段相对于拇指中指段的转动;
10.食指、中指、无名指和小指结构相同,均包括相应指基座、相应指基座近指段、相应指中指段、相应指远指段和相应指驱动器;所述相应指驱动器用于驱动相应指基座近指段相对于相应指基座的转动、相应指中指段相对于相应指基座近指段的转动以及相应指远指
段相对于相应指中指段的转动;
11.拇指的拇指基座,以及食指、中指、无名指和小指中相应指基座与手掌固定连接。
12.进一步的,拇指还包括拇指第一齿轮传动机构,固定于拇指基座内部的拇指基座轴以及固定于拇指基座和拇指近指段内部的拇指近关节轴;
13.拇指第一齿轮传动机构包括第一主动锥齿轮、拇指第一从动锥齿轮、拇指第一齿轮、拇指第二齿轮和拇指近指段转动块;
14.拇指第一驱动器驱动第一主动锥齿轮转动,拇指第一从动锥齿轮与第一主动锥齿轮啮合且套于拇指基座轴一端,拇指第一齿轮套于拇指基座轴另一端,拇指第二齿轮与拇指第一齿轮啮合且套于拇指近关节轴上,拇指近指段转动块一端与拇指近关节轴固定连接,另一端与拇指近指段固定连接。
15.进一步的,拇指还包括拇指第二齿轮传动机构,固定于拇指近指段内部的拇指近指段轴,固定于拇指近指段和拇指中指段内部的拇指中关节轴,拇指连杆机构以及拇指滚动齿轮齿条机构;
16.所述拇指第二齿轮传动机构包括拇指第二主动锥齿轮、拇指第二从动锥齿轮、拇指第三齿轮、拇指第四齿轮、拇指第五齿轮、拇指第六齿轮和拇指扭簧;
17.拇指第二驱动器驱动拇指第二主动锥齿轮转动,拇指第二从动锥齿轮套于拇指近指段轴上且与拇指第二主动锥齿轮啮合,拇指第三齿轮和拇指第五齿轮套于拇指近指段轴上,拇指第四齿轮套于拇指中关节轴上且与拇指第三齿轮啮合,拇指第六齿轮套于拇指中关节轴上且与拇指第五齿轮啮合;拇指扭簧套于拇指中关节轴上,拇指扭簧一端与拇指中关节轴固定连接,另一端与拇指中指段固定连接;
18.拇指连杆机构一端同时连接拇指中关节轴和拇指第四齿轮,另一端通过拇指滚动齿轮齿条机构连接拇指远指段。
19.进一步的,拇指还包括固定于拇指远指段和拇指中指段中的拇指远关节轴;
20.拇指连杆机构包括拇指第一连杆、拇指第二连杆、拇指第一连杆轴和拇指第二连杆轴;拇指第一连杆一端套接在拇指中关节轴上且与拇指第四齿轮固连,另一端依次连接拇指第一连杆轴、拇指第二连杆和拇指第二连杆轴;
21.拇指滚动齿轮齿条机构包括拇指第七齿轮、拇指第一齿条、拇指第二齿条和拇指第八齿轮;
22.拇指中指段内部设有滑动槽,拇指第一齿条固定在拇指中指段中,拇指第二齿条可沿所述滑动槽滑动,拇指第七齿轮套接在拇指第二连杆轴上,拇指第七齿轮同时与拇指第一齿条和拇指第二齿条啮合,拇指第八齿轮套于拇指远关节轴上且与拇指第二齿条啮合;
23.拇指基座轴、拇指近关节轴、拇指近指段轴、拇指中关节轴和拇指远关节轴相互平行。
24.进一步的,记食指所包含的相应指基座、相应指基座近指段、相应指中指段、相应指远指段和相应指驱动器分别为食指基座、食指近指段、食指中指段、食指远指段和食指驱动器;
25.食指还包括食指第一齿轮传动机构,食指第一连杆机构,食指第一滚动齿轮齿条机构和设于食指基座内部的食指基座轴以及设于食指基座和食指近指段内部的食指近关
节轴;
26.食指第一齿轮传动机构包括食指主动锥齿轮、食指从动锥齿轮、食指第一齿轮、食指第二齿轮、食指第三齿轮、食指第四齿轮和食指第一扭簧;
27.食指驱动器驱动食指主动锥齿轮转动,食指从动锥齿轮套固于食指基座轴上且与食指主动锥齿轮啮合,食指第一齿轮和食指第三齿轮套固在食指基座轴上,食指第二齿轮套固在食指近关节轴上且与食指第一齿轮啮合,食指第四齿轮套固在食指近关节轴上且与食指第三齿轮啮合,食指第一扭簧套于食指近关节轴上,一端与食指近关节轴固定连接,另一端与食指近指段固定连接;
28.食指第一连杆机构一端同时连接食指第二齿轮和食指近关节轴,另一端依次通过食指第一滚动齿轮齿条机构和食指第二滚动齿轮齿条机构带动食指中指段运动。
29.进一步的,食指还包括设于食指近指段内部的食指第一传动轴;
30.食指第一连杆机构包括食指第一连杆、食指第一连杆轴、食指第二连杆和食指第二连杆轴;食指第一连杆一端套接在食指近关节轴上且与食指第二齿轮固连,另一端依次连接食指第一连杆轴、食指第二连杆和食指第二连杆轴;
31.食指第一滚动齿轮齿条机构包括食指第五齿轮、食指第一齿条、食指第二齿条和食指第六齿轮;
32.食指近指段内部设有滑动槽,食指第一齿条固定在食指近指段中,食指第二齿条可沿所述滑动槽滑动,食指第五齿轮套接在食指第二连杆轴上,食指第五齿轮同时与食指第一齿条和食指第二齿条啮合,食指第六齿轮套固在食指第一传动轴上且与食指第二齿条啮合。
33.进一步的,食指还包括固定于食指近指段内部的食指第二传动轴和固定于食指近指段和食指中指段内部的食指中关节轴;
34.食指第二齿轮传动机构包括食指第七齿轮、食指第八齿轮、食指第九齿轮、食指第十齿轮、食指第十一齿轮、食指第十二齿轮和食指第二扭簧;
35.食指第七齿轮套固在食指第一传动轴上,食指第八齿轮套固在食指第二传动轴且与食指第七齿轮啮合,食指第九齿轮和食指第十一齿轮套固在食指第二传动轴上,食指第十齿轮套接在食指中关节轴上且与食指第九齿轮啮合,食指第十二齿轮套固在食指中关节轴上且与食指第十一齿轮啮合,食指第二扭簧套接在食指中关节轴上,食指第二扭簧一端与食指中关节轴固定连接,另一端与食指中指段固定连接;
36.食指还包括第二齿轮传动机构和食指第二连杆机构,食指第二连杆机构一端同时连接食指第十齿轮和食指中关节轴,另一端通过食指第二滚动齿轮齿条机构带动食指远指段运动。
37.进一步的,食指还包括设于食指中指段和食指远指段内部的食指远关节轴;
38.食指第二连杆机构包括食指第三连杆、食指第三连杆轴、食指第四连杆和食指第四连杆轴;食指第三连杆一端套接在中关节轴上并与食指第十齿轮固连,另一端依次连接食指第三连杆轴、食指第四连杆和食指第四连杆轴;
39.食指第二滚动齿轮齿条机构包括食指第十三齿轮、食指第三齿条、食指第四齿条、食指第十四齿轮;
40.食指中指段内设有滑动槽,食指第三齿条固定在食指中指段中,食指第四齿条可
沿所述滑动槽滑动,第十三齿轮套接于食指第四连杆轴上,食指第十三齿轮同时与食指第三齿条和食指第四齿条啮合,食指第十四齿轮套固在食指远关节轴上,并与食指第四齿条啮合;
41.食指基座轴、食指近关节轴、食指第一传动轴、食指第二传动轴、食指中关节轴和食指远关节轴相互平行。
42.进一步的,拇指第三齿轮和拇指第四齿轮的传动比为1:i,拇指第五齿轮和拇指第六齿轮的传动比为i:1,其中i《1。
43.进一步的,食指第一齿轮和食指第二齿轮的传动比为1:i,食指第三齿轮和食指第四齿轮的传动比为i:1,其中i《1。
44.本发明与现有技术相比具有如下有益效果:
45.(1)本发明利用5个欠驱动手指实现欠驱动手耦合自适应的抓取能力,根据目标物体形状大小的不同,可以自适应包络物体,也可以采用远指段捏持物体;
46.(2)本发明采用欠驱动的方式,拇指采用2个驱动器控制手指的两个关节,其余4个手指采用1个驱动器控制手指的三个关节,通过纯机械式的反馈系统,无需实时电子传感器反馈也可以实现对物体的稳定抓取;
47.(3)本发明结构紧凑,制造和维护成本低,抓取范围大,适用于智能机器人的末端执行器。
附图说明
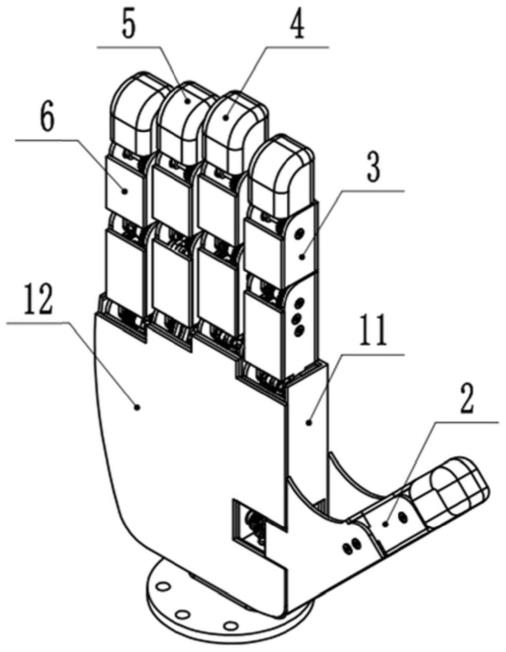
48.图1是本发明设计的耦合自适应欠驱动仿人手的整体立体外观图;
49.图2是图1所示实施例的前视图;
50.图3是图1所示实施例的右视图;
51.图4是图1所示实施例的传动结构示意图;
52.图5是图1所示实施例的拇指的上视图;
53.图6是图1所示实施例的拇指的内部结构前视图;
54.图7是图1所示实施例的拇指的内部结构右视图;
55.图8是图1所示实施例的食指的左视图;
56.图9是图1所示实施例的食指的内部结构左视图;
57.图10是图1所示实施例的食指的内部结构后视图;
58.图11是图1所示实施例的食指第一齿轮差速机构简图;
59.图12是图1所示实施例的食指第二齿轮差速机构简图;
60.图13是图1所示实施例的食指从一个角度观察的内部立体视图;
61.图14是图1所示实施例的食指的机械结构简图;
62.图15至图20是图1所示实施例的食指自适应包络物体的动作过程示意图;
63.图21是图1所示实施例捏持物体的外观示意图;
64.图22是图1所示实施例捏持物体的左视图;
65.图23是图1所示实施例自适应包络物体的外观示意图;
66.图24是图1所示实施例自适应包络物体的左视图。
具体实施方式
67.下面通过对本发明进行详细说明,本发明的特点和优点将随着这些说明而变得更为清楚、明确。
68.在这里专用的词“示例性”意为“用作例子、实施例或说明性”。这里作为“示例性”所说明的任何实施例不必解释为优于或好于其它实施例。尽管在附图中示出了实施例的各种方面,但是除非特别指出,不必按比例绘制附图。
69.参图1至图14所示,图1是本发明设计的耦合自适应仿人欠驱动手的整体立体外观图,图2是图1所示实施例的前视图,图3是图1所示实施例的右视图,图4是图1所示实施例的传动结构示意图,图5是图1所示实施例的拇指的上视图,图6是图1所示实施例的拇指的内部结构前视图,图7是图1所示实施例的拇指的内部结构右视图,图8是图1所示实施例的食指的左视图,图 9是图1所示实施例的食指的内部结构左视图,图10是图1所示实施例的食指的内部结构后视图,图11是图1所示实施例的食指第一齿轮差速机构简图,图 12是图1所示实施例的食指第二齿轮差速机构简图,图13是图1所示实施例的食指从一个角度观察的内部立体视图,图14是图1所示实施例的食指的机械结构简图,图15至图20是图1所示实施例的食指自适应包络物体的动作过程示意图,图21是图1所示实施例捏持物体的外观示意图,图22是图1所示实施例捏持物体的左视图,图23是图1所示实施例自适应包络物体的外观示意图,图24是图1所示实施例自适应包络物体的左视图。
70.本实施例提供了一种耦合自适应仿人欠驱动手,该手可以安装在机械臂上,配合机械臂实施物体的抓取动作,实现对物体的稳定抓取功能,该手驱动元件少,控制系统简单,抓取范围大,可用作智能机器人的末端执行器。参图1~图 14所示,该机器人手包括1个手掌和5个欠驱动手指。
71.所述手掌1包括手掌外壳11和手掌上盖板12;所述手掌外壳11和手掌上盖板12通过螺钉固定连接在一起;所述5个欠驱动手指都采用模块化设计,除拇指2外,其余4个手指(食指3、中指4、无名指5、小指6)结构尺寸完全相同,5个手指都通过螺钉与手掌外壳11固接在一起;
72.进一步,拇指采用2个电机驱动拇指的3个自由度,所述拇指2包括拇指基座221、拇指近指段222、拇指中指段223和拇指远指段224,拇指基座轴231、拇指近关节轴232、拇指近指段轴233、拇指中关节轴234、拇指远关节轴235、拇指第一驱动器、第一齿轮传动机构、拇指第二驱动器、第二齿轮传动机构、连杆机构、滚动齿轮齿条机构;
73.所述拇指基座轴231套接于拇指基座221中,所述拇指近关节轴232套接在拇指基座221和拇指近指段222中,所述拇指近指段轴233套接在近指段222 中,所述拇指中关节轴234套接在拇指近指段222和拇指中指段223中,所述拇指远关节轴235套接在拇指中指段223和远指段224中;所述拇指基座轴231、拇指近关节轴232、拇指近指段轴233、拇指中关节轴234和拇指远关节轴235 相互平行;
74.所述拇指第一驱动器包括拇指第一电机211和拇指第一减速器212;所述拇指第一电机211和拇指第一减速器212固接,拇指第一电机211的输出轴与拇指第一减速器212输入轴相连;所述拇指第一减速器212与拇指基座221固接;
75.所述拇指第一齿轮传动机构包括拇指第一主动锥齿轮241、拇指第一从动锥齿轮242、拇指第一齿轮243、拇指第二齿轮244、拇指近指段转动块245;所述拇指第一主动锥齿
轮241与拇指第一减速器212输出轴固接;所述拇指第一从动锥齿轮242套固在拇指基座轴231上,并与拇指第一主动锥齿轮241啮合;所述拇指第一齿轮243套固在拇指基座轴231上;所述拇指第二齿轮244 套固在拇指近关节轴232上,并与拇指第一齿轮243啮合;所述拇指近指段转动块套245固在拇指近关节轴232上,并与拇指近指段222固接;
76.所述拇指第二驱动器包括拇指第二电机251和拇指第二减速器252;所述拇指第二电机251和拇指第二减速器252固接,拇指第二电机251的输出轴与拇指第二减速器252输入轴相连;所述拇指第二减速器252与拇指近指段222 固接;
77.所述拇指第二齿轮传动机构包括拇指第二主动锥齿轮261、拇指第二从动锥齿轮262、拇指第三齿轮263、拇指第四齿轮264、拇指第五齿轮265、拇指第六齿轮266、拇指扭簧267;所述拇指第二主动锥齿轮261与拇指第二减速器 252输出轴固接;所述拇指第二从动锥齿轮262套固在近指段轴233上,并与拇指第二主动锥齿轮261啮合;所述拇指第三齿轮263和拇指第五齿轮265套固在拇指近指段轴233上;所述拇指第四齿轮264套接在拇指中关节轴234上,并与拇指第三齿轮263啮合;所述拇指第六齿轮266套固在拇指中关节轴234 上,并与拇指第五齿轮265啮合;所述拇指扭簧267套接在拇指中关节轴234 上,一端与拇指中关节轴234固定,一端与拇指中指段223固定。
78.所述拇指连杆机构包括拇指第一连杆271、拇指第二连杆273、拇指第一连杆轴272、拇指第二连杆轴274;所述拇指第一连杆271一端套接在拇指中关节轴234上,并与拇指第四齿轮264固连,另一端套接在拇指第一连杆轴272上;所述拇指第二连杆273一端套接在拇指第一连杆轴272上,另一端套接在拇指第二连杆轴274上;
79.所述拇指滚动齿轮齿条机构28包括拇指第七齿轮281、拇指第一齿条282、拇指第二齿条283、拇指第八齿轮284;所述拇指第一齿条282固定在拇指中指段中;所述拇指第二齿条283两端嵌入拇指中指段223的滑动槽内,拇指第二齿条283可在滑动槽内滑动;所述拇指第七齿轮281套接在拇指第二连杆轴274 上,并与拇指第一齿条282和拇指第二齿条283啮合;所述拇指第八齿轮284 套固在拇指远关节轴235上,并与拇指第二齿条283啮合;
80.进一步,食指采用1个电机驱动食指的3个关节,所述食指3包括食指基座321、食指近指段322、食指中指段323、食指远指段324、食指基座轴331、食指近关节轴332、食指第一传动轴333、食指第二传动轴334、食指中关节轴335、食指远关节轴336、食指驱动器、食指第一齿轮传动机构、食指第一连杆机构、食指第一滚动齿轮齿条机构、食指第二齿轮传动机构、食指第二连杆机构、食指第二滚动齿轮齿条机构;
81.所述食指基座轴331套接于食指基座321中,所述食指近关节轴332套接在食指基座321和食指近指段322中,所述食指第一传动轴333和第二传动轴 334套接在食指近指段322中,所述食指中关节轴335套接在食指近指段322 和食指中指段323中,所述食指远关节轴336套接在食指中指段323中并套固在食指远指段324中;所述食指基座轴331、食指近关节轴332、食指第一传动轴333、食指第二传动轴334、食指中关节轴335和食指远关节轴336相互平行;
82.所述食指驱动器包括食指电机311和食指减速器312;所述食指电机311 和食指减速器312固接,食指电机311的输出轴与食指减速器312输入轴相连;所述食指减速器312与食指基座321固接;
83.所述食指第一齿轮传动机构包括食指主动锥齿轮341、食指从动锥齿轮342、食指
第一齿轮343、食指第二齿轮344、食指第三齿轮345、食指第四齿轮346、食指第一扭簧347;所述食指主动锥齿轮341与食指减速器312输出轴固接;所述食指从动锥齿轮342套固在基座轴331上,并与食指主动锥齿轮341啮合;所述食指第一齿轮343和食指第三齿轮345套固在食指基座轴331上;所述食指第二齿轮344套接在食指近关节轴332上,并与食指第一齿轮343啮合;所述食指第四齿轮346套固在近关节轴332上,并与食指第三齿轮345啮合;所述食指第一扭簧347套接在食指近关节轴332上,一端与食指近关节轴331固定,一端与食指近指段322固定;
84.所述食指第一连杆机构包括食指第一连杆351、食指第一连杆轴352、食指第二连杆353、食指第二连杆轴354;所述食指第一连杆351一端套接在食指近关节轴332上,并与食指第二齿轮344固连,另一端套接在食指第一连杆轴352 上;所述食指第二连杆353一端套接在食指第一连杆轴352上,另一端套接在食指第二连杆轴354上;
85.所述食指第一滚动齿轮齿条机构包括食指第五齿轮361、食指第一齿条362、食指第二齿条363、食指第六齿轮364;所述食指第一齿条362固定在食指近指段322中;所述食指第二齿条363两端嵌入食指近指段322滑动槽内,食指第二齿条363可在滑动槽内滑动;所述食指第五齿轮361套接在食指第二连杆轴 354上,并与食指第一齿条362和食指第二齿条363啮合;所述食指第六齿轮 364套固在食指第一传动轴333上,并与食指第二齿条363啮合;
86.所述食指第二齿轮传动机构包括食指第七齿轮371、食指第八齿轮372、食指第九齿轮373、食指第十齿轮374、食指第十一齿轮375、食指第十二齿轮376、食指第二扭簧377;所述食指第七齿轮371套固在食指第一传动轴333上;所述食指第八齿轮372套固在食指第二传动轴334上,并与食指第七齿轮371啮合;所述食指第九齿轮373和食指第十一齿轮375套固在食指第二传动轴334 上;所述食指第十齿轮374套接在食指中关节轴335上,并与食指第九齿轮373 啮合;所述食指第十二齿轮376套固在食指中关节轴335上,并与食指第十一齿轮375啮合;所述食指第二扭簧377套接在食指中关节轴335上,一端与食指中关节轴335固定,一端与食指中指段323固定;
87.所述食指第二连杆机构包括食指第三连杆381、食指第三连杆轴382、食指第四连杆383、食指第四连杆轴384;所述食指第三连杆381一端套接在中关节轴335上,并与食指第十齿轮374固连,另一端套接在食指第三连杆轴382上;所述食指第四连杆383一端套接在食指第三连杆轴382上,另一端套接在食指第四连杆轴384上;
88.所述食指第二滚动齿轮齿条机构包括食指第十三齿轮391、食指第三齿条 392、食指第四齿条393、食指第十四齿轮394;所述食指第三齿条392固定在食指中指段323中;所述食指第四齿条393两端嵌入食指中指段323滑动槽内,食指第四齿条393可在滑动槽内滑动;所述食指第十三齿轮391套接在食指第四连杆轴384上,并与食指第三齿条392和食指第四齿条393啮合;所述食指第十四齿轮394套固在食指远关节轴336上,并与食指第四齿条393啮合;
89.进一步,所述中指4、无名指5、小指6结构尺寸与食指3完全相同,通过 1个电机可控制手指的三个关节转动。
90.本实施例的具体工作原理,结合图1至图24,叙述如下:
91.本实施例中,将初始位置设置为每个手指与手掌平行的状态,如图2所示。
92.拇指的工作原理为:
93.当拇指近指段222未接触到物体的时候,拇指第一驱动器正转,带动拇指第一主动锥齿轮241转动,拇指第一主动锥齿轮241带动拇指第一从动锥齿轮 242转动,拇指第一从动锥齿轮242与拇指基座轴231固接,于是带动固接在拇指基座轴231上的拇指第一齿轮243转动,拇指第一齿轮243与拇指第二齿轮244啮合,从而带动拇指第二齿轮244转动;拇指第二齿轮244和拇指近指段转动块245都套固在拇指近关节轴232上,拇指近指段转动块245又与拇指近指段222固接,从而带动拇指近指段222绕拇指近关节轴232转动;
94.当拇指中指段223和拇指远指段224均未接触到物体的时候,拇指第二驱动器正转,带动拇指第二主动锥齿轮261转动,拇指第二主动锥齿轮261带动拇指第二从动锥齿轮262转动,拇指第二从动锥齿轮262与拇指近指段轴233 固接,于是带动固接在拇指近指段轴233上的拇指第三齿轮263和拇指第五齿轮265转动,拇指第三齿轮263和拇指第四齿轮264啮合,拇指第五齿轮265 和拇指第六齿轮266啮合,从而带动拇指第四齿轮264和拇指第六齿轮266转动;拇指第三齿轮263和拇指第四齿轮264的传动比为1:i,拇指第五齿轮265 和拇指第六齿轮266的传动比为i:1,其中i《1;由于拇指扭簧267的存在,拇指中关节轴234和拇指中指段223仿佛固连在一起;当拇指第六齿轮266转动角度α时,拇指中指段223也相对于拇指近指段222转动角度α;而拇指第四齿轮264转动角度大于α,由于拇指第一连杆271与拇指第四齿轮264固连,所以拇指第一连杆271相对于拇指近指段转动角度也大于α,从而拇指第七齿轮281在拇指第一齿条282上作向靠近拇指远指段224的方向滚动,拇指第七齿轮281带动拇指第二齿条283向靠近拇指远指段224方向滑动,拇指第二齿条283带动拇指第八齿轮284转动;拇指第八齿轮284和拇指远指段224都固接在拇指远关节轴235上,带动拇指远指段224转动,实现拇指中指段223与拇指远指段224的耦合运动;
95.当拇指近指段222先接触到物体的时候,拇指近指段222因为物体的阻挡而无法转动,从而拇指近指段222可对物体施加作用力,而拇指中指段223和拇指远指段224都可以在拇指第二驱动器的控制下转动;
96.当拇指中指段223先接触到物体的时候,拇指中指段223因为物体的阻挡而无法转动;由于拇指扭簧267的存在,拇指中关节轴234可继续转动,并且通过拇指扭簧267将其继续旋转产生的扭矩作用于拇指中指段223,拇指中指段223产生对物体的作用力。由于拇指第六齿轮266继续旋转,拇指第一连杆 271与拇指第六齿轮266固连,拇指第一连杆271转动带动拇指第二连杆273 转动,拇指第二连杆273推动拇指第七齿轮281在拇指第一齿条282上继续滚动,拇指第七齿轮281带动拇指第二齿条283向靠近拇指远指段224的方向滑动,从而拇指第二齿条283带动拇指第八齿轮284转动,拇指远指段224继续转动,开始包络物体;当拇指远指段224接触到物体时,拇指中指段223和拇指远指段224实现对物体的自适应包络抓取;
97.当拇指远指段224先接触到物体的时候,拇指远指段224因为物体的阻挡而无法转动;由于拇指远指段224、拇指远关节轴235和拇指第八齿轮284固连,所以拇指第八齿轮284也停止转动,从而拇指滚动齿轮齿条机构、拇指连杆机构、拇指第二齿轮传动机构、拇指第二驱动器都无法运动,从而拇指远指段224实现对物体的捏持。
98.释放物体时,拇指第一驱动器和拇指第二驱动器相互配合,实现反转,过程与上述抓取物体过程相反。
99.食指的工作原理为:
100.当食指近指段322、食指中指段323和食指远指段324均未接触到物体的时候,食指驱动器正转,带动食指主动锥齿轮341转动,食指主动锥齿轮341 带动食指从动锥齿轮342转动,食指从动锥齿轮342与食指基座轴331固接,于是带动固接在食指基座轴331上的食指第一齿轮343和食指第三齿轮345转动,食指第一齿轮343和食指第二齿轮344啮合,食指第三齿轮345和食指第四齿轮346啮合,从而带动食指第二齿轮344和食指第四齿轮346转动;食指第一齿轮343和食指第二齿轮344的传动比为1:i,食指第三齿轮345和食指第四齿轮346的传动比为i:1,其中i《1;由于食指第一扭簧347的存在,食指近关节轴332和食指近指段322仿佛固连在一起;当食指第四齿轮346转动角度α时,食指近指段322也相对于食指基座321转动角度α;而食指第二齿轮344转动角度大于α,由于食指第一连杆351与食指第二齿轮344固连,所以食指第一连杆351相对于食指基座321转动角度也大于α,从而食指第五齿轮361在食指第一齿条362上作向靠近食指中指段323的方向滚动,食指第五齿轮361带动食指第二齿条363向靠近食指中指段323方向滑动,食指第二齿条363带动食指第六齿轮364转动;
101.食指第六齿轮364、食指第七齿轮371都与食指第一传动轴333固接,食指第八齿轮372与食指第七齿轮371啮合,于是带动食指第八齿轮372转动;而食指第八齿轮372、食指第九齿轮373、食指第十一齿轮375都与食指第二传动轴334固接,食指第十齿轮374和食指第九齿轮373啮合,食指第十二齿轮376和食指第十一齿轮375啮合,从而带动食指第十齿轮374和食指第十二齿轮376转动;食指第九齿轮373和食指第十齿轮374的传动比为i:1,食指第十一齿轮375和食指第十二齿轮376的传动比为1:i,其中i《1;由于食指第二扭簧377的存在,食指中关节轴335和食指中指段323仿佛固连在一起;当食指第十二齿轮376转动角度α时,食指中指段323也相对于食指近指段322 转动角度α;而食指第十齿轮374转动角度大于α,由于食指第三连杆381与食指第十齿轮374固连,所以食指第三连杆381相对于食指近指段322转动角度也大于α,从而食指第十三齿轮391在食指第三齿条392上作向靠近食指远指段324的方向滚动,食指第十三齿轮391带动食指第四齿条393向靠近食指远指段324方向滑动,食指第四齿条393带动食指第十四齿轮394转动;食指第十四齿轮394和食指远指段324都固接在食指远关节轴336上,从而带动食指远指段324转动;经过上述机构传动,可实现食指近指段321、食指中指段 322与食指远指段323的耦合运动;
102.当食指近指段322先接触到物体的时候,食指近指段322因为物体的阻挡而无法转动;由于食指第一扭簧347的存在,食指近关节轴332可继续转动,并且通过食指第一扭簧347将其继续旋转产生的扭矩作用于食指近指段322,食指近指段322产生对物体的作用力。由于食指第二齿轮344继续旋转,通过食指第一连杆机构35、食指第一滚动齿轮齿条机构36、食指第二齿轮传动机构 37、食指第二连杆机构38、食指第二滚动齿轮齿条机构传动39,实现食指中指段323和食指远指段324的耦合自适应抓取功能;
103.当食指中指段323先接触到物体的时候,食指中指段323因为物体的阻挡而无法转动;食指驱动器31通过食指第一齿轮传动机构34、食指第一连杆机构35、食指第一滚动齿轮齿条机构36将动能传递给食指第二齿轮传动机构37;由于食指第二扭簧377的存在,食指中关节轴335可继续转动,并且通过食指第二扭簧377将其继续旋转产生的扭矩作用于食指中指段323,食指中指段323 产生对物体的作用力。由于食指第十齿轮374继续旋转,通过食指
第二连杆机构38、食指第二滚动齿轮齿条机构传动39,实现食指远指段324的转动;
104.当食指远指段324先接触到物体的时候,食指远指段324因为物体的阻挡而无法转动;由于食指远指段324、食指远关节轴336和食指第十四齿轮394 固连,所以食指第十四齿轮394也停止转动,从而食指第二滚动齿轮齿条机构 39、食指第二连杆机构38、食指第二齿轮传动机构37、食指第一滚动齿轮齿条机构36、食指第一连杆机构35、食指第一齿轮传动机构34、食指驱动器31都无法运动,从而食指远指段324实现对物体的捏持。
105.释放物体时,食指驱动器31反转,过程与上述抓取物体过程相反。
106.中指4、无名指5、小指6结构尺寸与食指相同,如图4中所示,中指4 包括中指基座421、中指近指段422、中指中段423、中指远指段424,无名指 5包括无名指基座521、无名指近指段522、无名指中指段523、无名指远指段 524,小指6包括小指基座621、小指近指段622、小指中指段623、小指远指段624,所以工作原理也与食指3相同。通过5个欠驱动手指配合,欠驱动仿人手可以实现指尖捏持和指段自适应包络物体的抓取功能。
107.上述各种情况下,本发明所提出的该实施例装置均可正常工作。
108.本发明提供一种耦合自适应仿人欠驱动手,具有如下有益效果:
109.1)该机器人手可对不同形状尺寸的物体实现耦合自适应包络的复合抓取模式;
110.2)该机器人手结构紧凑,集成度高,制造和维护成本低,抓取范围大,适用于智能机器人的末端执行器。
111.以上结合具体实施方式和范例性实例对本发明进行了详细说明,不过这些说明并不能理解为对本发明的限制。本领域技术人员理解,在不偏离本发明精神和范围的情况下,可以对本发明技术方案及其实施方式进行多种等价替换、修饰或改进,这些均落入本发明的范围内。本发明的保护范围以所附权利要求为准。
112.本发明说明书中未作详细描述的内容属本领域技术人员的公知技术。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
