1.本发明属于脚手架技术领域,具体涉及一种智能建筑脚手架。
背景技术:
2.里脚手架又称内墙脚手架,是沿室内墙面搭设的脚手架。它分为多种,可用于内外墙砌筑和室内装修施工,具有用料少,灵活轻便等优点;里脚手架搭设于建筑物内部,每砌完一层墙后,即将其转移到上一层楼面,进行新的一层砌体砌筑,它可用于内外墙的砌筑和室内装饰施工,通常在完成一部分墙面的装饰工作后,需要将脚手架调整位置才能继续进行工作,这股过程,需要工人反复上下爬升脚手架,不仅影响装饰工程效率,风险系数也随之提升,通过让脚手架通过外置控制进行移动,可提升脚手架智能化,使其更方便使用。
技术实现要素:
3.本发明的目的是提供一种智能建筑脚手架,能够具有更好的稳固性,保证上部结构的稳定性,增加与底面固定结构的支撑性,提升平衡效果,能够降低上部结构移动时的重心偏移。
4.本发明采取的技术方案具体如下:
5.一种智能建筑脚手架,包括底盘架,所述底盘架的末端侧面固定连接有侧固定板,所述侧固定板的侧面设置有定位滚轮。
6.所述滑板斜槽的内侧设置有滑动板,所述滑动板的两端均连接有固定滑动端,所述固定滑动端的底端连接有支撑脚杆,所述支撑脚杆的底端连接有触底底座,所述滑动板的边缘侧面设置有推动杆。
7.所述底盘架的内侧连接有转向轴定位板,所述转向轴定位板的侧面连接有转向转轴,所述转向转轴顶端连接有转向电机,所述转向电机与转向轴定位板固定连接,所述转向转轴的侧面连接有车架固板,所述车架固板末端开设有滑动槽,所述滑动槽内侧设置有滑动块。
8.所述底盘架的表面螺纹连接有竖支撑杆,所述竖支撑杆的末端螺纹连接有螺纹连杆套,所述螺纹连杆套的侧面固定连接有连接横杆,所述螺纹连杆套另一处侧面固定连接有侧固横杆,所述连接横杆与侧固横杆成角度九十度,所述竖支撑杆的侧面铰接有斜支撑杆,所述斜支撑杆的另一端与连接横杆铰接,所述连接横杆与平台底板固定连接,所述平台底板与侧固横杆固定连接,所述斜支撑杆与竖支撑杆相交处连接有加固长杆。
9.所述底盘架的中间位置固定连接有内置桁架,所述侧固定板的内侧面固定连接有固定杆,所述内置桁架的两侧均固定连接有液压固定架,所述液压固定架的内侧设置有液压杆,所述液压杆末端固定连接有推置架,所述推置架的末端固定连接有腰槽环板。
10.所述滑板斜槽与滑动板滑动连接,所述滑动板与固定滑动端固定连接,所述固定滑动端与支撑脚杆固定连接,所述支撑脚杆与触底底座固定连接,所述滑动板与推动杆固定连接,所述推动杆与腰槽环板滑动连接。
11.所述底盘架与转向轴定位板固定连接,所述转向轴定位板与转向转轴转动连接,所述转向转轴与车架固板固定连接,所述滑动槽与滑动块滑动连接,所述滑动块上表面铰接连接有转向连接板,所述转向转轴的底侧末端固定连接有车轴架,所述车轴架末端转动连接有车轮轴,所述车轮轴的末端均固定连接有电力驱动轮。
12.所述定位滚轮与侧固定板固定连接,所述定位滚轮的内部设置有滚珠轮。
13.所述平台底板的正上方设置有楼梯台板,所述楼梯台板的侧面固定连接有侧挡板,所述楼梯台板的上表面固定连接有架梯活节,所述架梯活节侧面转动连接有翻转架梯,所述翻转架梯侧面固定连接有挂杆槽架,所述挂杆槽架的底侧开设有横槽,所述翻转架梯的内侧固定连接有踏板。
14.所述楼梯台板的表面开设有置杆槽,所述置杆槽的侧面开设有限位滑槽,所述限位滑槽的内侧滑动连接有限位块,所述置杆槽的设置有翻转挂杆,所述翻转挂杆与楼梯台板转动连接。
15.本发明取得的技术效果为:
16.本发明,安装时将竖支撑杆通过螺纹与底盘架对应孔位进行连接,然后在竖支撑杆末端连接上螺纹连杆套,让螺纹连杆套侧面连接的连接横杆与侧固横杆加强整体结构稳定性,在将斜支撑杆与竖支撑杆和连接横杆固定,将该部分结构组合好后,再将平台底板架设到连接横杆与侧固横杆上方,并用螺钉固定即可,该结构通过组合连接来增加整体高度,针对楼层高较大的房间进行调整,这种结构相比折叠结构的移动脚手架相比,具有更好的稳固性。
17.本发明,通过液压固定架内侧的液压杆挤压末端连接的推置架移动,进而让推置架推动腰槽环板向前移动,并将滑动板推动,该结构的好处在于,需要将脚手架进行固定时,通过结构驱动,对当前地点进行找平,保证上部结构的稳定性,增加与底面固定结构的支撑性。
18.本发明,当滑动板通过滑板斜槽被推动到末端时,滑动板末端固定的支撑脚杆逐渐向底面靠近,并让触底底座与地面接触,通过触底底座倾斜斜面,能够让底盘架保持水平状态,该结构的好处在于,能够上述底部结构与底面固定时,通过改变滑动板滑动位置,进而调整平衡性,提升平衡效果。
19.本发明,通过外置远程遥控设备,控制连接转向电机的远程型号接收装置,让转向电机运作,转向电机转动时,通过带动转向转轴转动,进而让转向转轴连接的车轴架与车轮轴一同产生偏转,同时转向转轴偏转会带动固定的车架固板转动,进而让滑动块与滑动块产生滑动,让转向连接板产生偏转,通过上述结构,能够改变电力驱动轮的朝向角度,进而控制转向,调整整体做弧形轨迹运动,弧形运动,在移动时,能够降低上部结构移动时的重心偏移。
20.本发明,通过翻转架梯以架梯活节翻转节点,将翻转架梯底侧与下层平台底板接触,进而让翻转架梯以踏板作为楼梯爬升,收纳时,也能够作为平台进行使用,不会占用多余空间。
附图说明
21.图1是本发明的正面立体结构示意图;
22.图2是本发明中脚手架组合的结构示意图;
23.图3是本发明中底盘架内部主体结构示意图;
24.图4是本发明中滑动板驱动结构示意图;
25.图5是本发明中腰槽环板结构示意图;
26.图6是本发明中车架固板转向结构示意图;
27.图7是本发明中楼梯台板表面的结构示意图;
28.图8是本发明中定位滚轮结构示意图;
29.图9是本发明中翻转架梯结构示意图;
30.图10是本发明中图7中a的放大结构示意图;
31.图11是本发明中翻转挂杆结构示意图。
32.附图中,各标号所代表的部件列表如下:
33.1、底盘架;2、定位滚轮;3、侧固定板;4、固定滑动端;5、竖支撑杆;6、侧挡板;7、平台底板;8、楼梯台板;9、螺纹连杆套;10、斜支撑杆;11、连接横杆;12、侧固横杆;13、加固长杆;14、滑板斜槽;15、固定杆;16、内置桁架;17、滑动板;18、转向轴定位板;19、转向转轴;20、转向电机;21、推置架;22、液压固定架;23、液压杆;24、支撑脚杆;25、触底底座;26、推动杆;27、腰槽环板;28、车架固板;29、转向连接板;30、滑动槽;31、滑动块;32、车轴架;33、车轮轴;34、电力驱动轮;35、架梯活节;36、翻转架梯;37、置杆槽;38、翻转挂杆;39、滚珠轮;40、挂杆槽架;41、踏板;42、限位滑槽;43、限位块。
具体实施方式
34.为了使本发明的目的及优点更加清楚明白,以下结合实施例对本发明进行具体说明。应当理解,以下文字仅仅用以描述本发明的一种或几种具体的实施方式,并不对本发明具体请求的保护范围进行严格限定。
35.如图1-11所示,一种智能建筑脚手架,包括底盘架1,底盘架1的末端侧面固定连接有侧固定板3,侧固定板3的侧面设置有定位滚轮2。
36.滑板斜槽14的内侧设置有滑动板17,滑动板17的两端均连接有固定滑动端4,固定滑动端4的底端连接有支撑脚杆24,支撑脚杆24的底端连接有触底底座25,滑动板17的边缘侧面设置有推动杆26。
37.底盘架1的内侧连接有转向轴定位板18,转向轴定位板18的侧面连接有转向转轴19,转向转轴19顶端连接有转向电机20,转向电机20与转向轴定位板18固定连接,转向转轴19的侧面连接有车架固板28,车架固板28末端开设有滑动槽30,滑动槽30内侧设置有滑动块31。
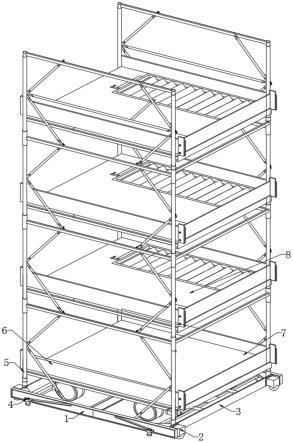
38.参照附图1及图2,底盘架1的表面螺纹连接有竖支撑杆5,竖支撑杆5的末端螺纹连接有螺纹连杆套9,螺纹连杆套9的侧面固定连接有连接横杆11,螺纹连杆套9另一处侧面固定连接有侧固横杆12,连接横杆11与侧固横杆12成角度九十度,竖支撑杆5的侧面铰接有斜支撑杆10,斜支撑杆10的另一端与连接横杆11铰接,连接横杆11与平台底板7固定连接,平台底板7与侧固横杆12固定连接,斜支撑杆10与竖支撑杆5相交处连接有加固长杆13,通过上述结构,安装时将竖支撑杆5通过螺纹与底盘架1对应孔位进行连接,然后在竖支撑杆5末端连接上螺纹连杆套9,让螺纹连杆套9侧面连接的连接横杆11与侧固横杆12加强整体结构
稳定性,在将斜支撑杆10与竖支撑杆5和连接横杆11固定,将该部分结构组合好后,再将平台底板7架设到连接横杆11与侧固横杆12上方,并用螺钉固定即可,该结构通过组合连接来增加整体高度,针对楼层高较大的房间进行调整,这种结构相比折叠结构的移动脚手架相比,具有更好的稳固性。
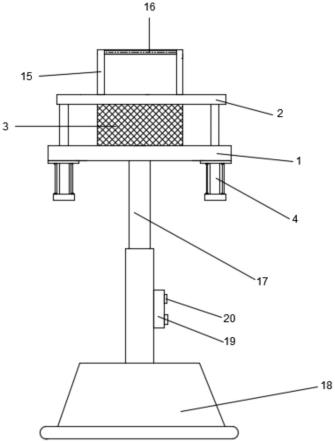
39.参照附图3及图4,底盘架1的中间位置固定连接有内置桁架16,侧固定板3的内侧面固定连接有固定杆15,内置桁架16的两侧均固定连接有液压固定架22,液压固定架22的内侧设置有液压杆23,液压杆23末端固定连接有推置架21,推置架21的末端固定连接有腰槽环板27,通过上述结构,通过液压固定架22内侧的液压杆23挤压末端连接的推置架21移动,进而让推置架21推动腰槽环板27向前移动,并将滑动板17推动,该结构的好处在于,需要将脚手架进行固定时,通过结构驱动,对当前地点进行找平,保证上部结构的稳定性,增加与底面固定结构的支撑性。
40.参照附图5,滑板斜槽14与滑动板17滑动连接,滑动板17与固定滑动端4固定连接,固定滑动端4与支撑脚杆24固定连接,支撑脚杆24与触底底座25固定连接,滑动板17与推动杆26固定连接,推动杆26与腰槽环板27滑动连接,通过上述结构,当滑动板17通过滑板斜槽14被推动到末端时,滑动板17末端固定的支撑脚杆24逐渐向底面靠近,并让触底底座25与地面接触,通过触底底座25倾斜斜面,能够让底盘架1保持水平状态,该结构的好处在于,能够上述底部结构与底面固定时,通过改变滑动板17滑动位置,进而调整平衡性,提升平衡效果。
41.参照附图6,底盘架1与转向轴定位板18固定连接,转向轴定位板18与转向转轴19转动连接,转向转轴19与车架固板28固定连接,滑动槽30与滑动块31滑动连接,滑动块31上表面铰接连接有转向连接板29,转向转轴19的底侧末端固定连接有车轴架32,车轴架32末端转动连接有车轮轴33,车轮轴33的末端均固定连接有电力驱动轮34,电力驱动轮34属于现有技术,通过电机进行驱动,电力驱动轮34为电瓶车磁力驱动轮,通过上述结构,通过外置远程遥控设备,控制连接转向电机20的远程型号接收装置,让转向电机20运作,转向电机20转动时,通过带动转向转轴19转动,进而让转向转轴19连接的车轴架32与车轮轴33一同产生偏转,同时转向转轴19偏转会带动固定的车架固板28转动,进而让滑动块31与滑动块31产生滑动,让转向连接板29产生偏转,通过上述结构,能够改变电力驱动轮34的朝向角度,进而控制转向,调整整体做弧形轨迹运动,弧形运动,在移动时,能够降低上部结构移动时的重心偏移。
42.参照附图8,定位滚轮2与侧固定板3固定连接,定位滚轮2的内部设置有滚珠轮39,通过上述结构,通过滚珠轮39辅助底盘架1的移动并增加了底部支撑点数目,进而增加底部的稳定性,同时滚珠轮39滚动具有更好的灵活性。
43.参照附图7及图9,平台底板7的正上方设置有楼梯台板8,楼梯台板8的侧面固定连接有侧挡板6,楼梯台板8的上表面固定连接有架梯活节35,架梯活节35侧面转动连接有翻转架梯36,翻转架梯36侧面固定连接有挂杆槽架40,挂杆槽架40的底侧开设有横槽,翻转架梯36的内侧固定连接有踏板41,通过上述结构,通过翻转架梯36以架梯活节35翻转节点,将翻转架梯36底侧与下层平台底板7接触,进而让翻转架梯36以踏板41作为楼梯爬升,收纳时,也能够作为平台进行使用,不会占用多余空间。
44.参照附图10及图11,楼梯台板8的表面开设有置杆槽37,置杆槽37的侧面开设有限
位滑槽42,限位滑槽42的内侧滑动连接有限位块43,置杆槽37的设置有翻转挂杆38,翻转挂杆38与楼梯台板8转动连接,通过上述结构,通过翻转翻转挂杆38,进而让翻转挂杆38末端翘起部分通过偏转转入到置杆槽37内侧,并通过推动限位块43在限位滑槽42滑动,直至限位块43挡住置杆槽37偏转,让挂杆槽架40挂在翻转挂杆38表面即可,即可对翻转架梯36件收纳。
45.本发明的工作原理为:首先,安装时将竖支撑杆5通过螺纹与底盘架1对应孔位进行连接,然后在竖支撑杆5末端连接上螺纹连杆套9,让螺纹连杆套9侧面连接的连接横杆11与侧固横杆12加强整体结构稳定性,在将斜支撑杆10与竖支撑杆5和连接横杆11固定,将该部分结构组合好后,再将平台底板7架设到连接横杆11与侧固横杆12上方,通过外置远程遥控设备,控制连接转向电机20的远程型号接收装置,让转向电机20运作,转向电机20转动时,通过带动转向转轴19转动,进而让转向转轴19连接的车轴架32与车轮轴33一同产生偏转,同时转向转轴19偏转会带动固定的车架固板28转动,进而让滑动块31与滑动块31产生滑动,让转向连接板29产生偏转,通过上述结构,能够改变电力驱动轮34的朝向角度,进而控制转向,当移动到指定位置后,通过液压固定架22内侧的液压杆23挤压末端连接的推置架21移动,进而让推置架21推动腰槽环板27向前移动,并将滑动板17推动,当滑动板17通过滑板斜槽14被推动到末端时,滑动板17末端固定的支撑脚杆24逐渐向底面靠近,并让触底底座25与地面接触,通过触底底座25倾斜斜面,能够让底盘架1保持水平状态即可。
46.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。本发明中未具体描述和解释说明的结构、装置以及操作方法,如无特别说明和限定,均按照本领域的常规手段进行实施。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。