1.本发明涉及无人艇领域,具体为一种基于概率博弈论框架的无人艇自动避碰方法。
背景技术:
2.无人水面艇因其具有机动灵活、自主能力强等特点被各个领域应用,尤其是在繁忙的港口、码头等水域,无人艇可以实现垃圾的自主清扫、巡逻和预警功能,比有人船更高效、更安全。在繁忙的港口、码头等水域工作时,无人艇自主避碰是其实现智能航行的关键技术之一。
3.现有的技术中,常用的无人艇自动避碰方法有速度障碍法、动态窗口法、人工势场法等。
4.速度障碍法基本原理是在速度空间中生成一个锥形障碍区域,只要保证无人艇的速度矢量在vo之外,就不会与对方船舶发生碰撞。该方法大都局限于单目标的避碰,对多随机移动目标极少考虑,显然不适用于繁忙的港口、码头等水域。
5.动态窗口法基本思想是将无人艇当前速度空间的线速度和角速度进行离散,将不同的线速度和角速度组成一个样本点,并根据选取的样本点估计无人艇在很短时间内可能航行的所有轨迹,然后对预估的轨迹进行碰撞性检测,剔除不可取的样本点,最后利用距目标点距离、与障碍物距离、速度改变量等特征构建一个目标函数,借此对可行的速度组合进行评价,选取无碰撞的最优速度组合作为无人艇下一阶段的决策目标。该方法虽然优化了计算速度,但是在复杂环境下灵活性差。
6.人工势场法的基本原理是将无人艇航行的地理空间虚拟化为一个人工势能场,目标点在整个空间中产生引力势场,障碍物在周边空间中产生斥力势场,通过引力势场和斥力势场的叠加构成总的合势能场。处于合势场的无人艇通过引力势场朝向目标点运动,同时凭借障碍物产生的斥力势场避开障碍物,最终在无碰撞的情况下到达目标点。但是该方法存在局部极小值及抖动现象。
7.在繁忙的水域有很多移动的船只,船舶之间的避碰行为往往取决于驾驶员的经验和随机判断,其航行行为具有非常大的随机性,传统的避碰策略很很难应对。
技术实现要素:
8.本发明的目的在于提供一种基于概率博弈论框架的无人艇自动避碰方法,以提高避碰方法在繁忙水域的避碰实用性。
9.为实现上述目的,本发明提供如下技术方案:
10.一种基于概率博弈论框架的无人艇自动避碰方法,包括如下步骤:
11.s1.建立概率分布模型;
12.s2.将概率地图离散化;
13.s3.计算船只的绝对位置;
14.s4.设计避碰方案,包括如下步骤:
15.1)采集目标船只的航行状态,航速、航向;
16.2)计算目标船只下一时刻所有可能的位置和概率,算式如下:p[c
ij
(t 1)y(t)]=p[ci(t 1)y(t)
·
p[cj(t 1)y(t)];y
cartes
(c
ij
,t 1)=y
cartes
(t)
△ycartes
(c
ij
,t)
[0017]
3)计算出所有可能的前进速度和航向角,
[0018]
4)计算出代价函数cos[ua(t)]最小值时的ua(t),代价函数如下
[0019]
5)将ua(t)传递给无人艇控制器,控制无人艇按照ua(t)航行;
[0020]
6)回到步骤1)。
[0021]
优选的,s1中建立概率分布模型中,假设目标船的航向角和速度在一定范围内是随机的,由于存在物理约束,因此目标船只的航向角和航速是缓慢变化的,不可能出现突变,定义航向角的概率分布是正态分布,公式如下:其中是是航向角,是是航向角的方差;
[0022]
航速的概率分布如下:其中u代表船舶前进航速,σu是前进速度方差,u
crs
是巡航速度。
[0023]
优选的,s2中将概率地图离散化,基于概率博弈论的避碰,将地图离散化,只针对概率区域开展地图离散化,对于无人艇或目标船只来讲,具有如下物理约束,其航速具有上限,定义为u
max
,航向角在短时间δt内不会产生突变,即
[0024]
基于上述两种约束,假设船只在地图上t时刻的位置是y(t),那么t 1时,船只的位置y(t 1)肯定是在以y(t)为圆心的扇形区域内,其极坐标形式表示形式为:且t 1时刻,船只位置y(t 1)的概率分布为:将扇形区域的径向距离分成n等份,将跨度角分成m等份,得到n
×
m个单元,定义离散单元为c
ij
,则t 1时刻该单元的条件概率分布为:
[0025]
p[c
ij
(t 1)y(t)]=p[ci(t 1)y(t)
·
p[cj(t 1)y(t)]
[0026]
其中i∈{1...n},j∈{1...m},ci(t 1)代表第i行的任意单元,cj(t 1)代表第j列的任意单元,结合上述算式得出如下算式:
[0027]
[0028][0029]
将上述算式相乘,得到条件概率分布。
[0030]
优选的,上述离散化的区域是以t时刻船只位置为圆心的扇形区域,要实现无人艇的避碰,需要建立绝对坐标,s3中设单元格的位置是以它们的圆心为坐标,相对于t时刻位置的极矢量:转换成笛卡尔坐标系得到:则船只在单元格c
ij
绝对位置为:y
cartes
(c
ij
,t)=y
cartes
(t) δy
cartes
(c
ij
,t),至此将船舶位置离散化并得到
t 1
时刻位置的概率。
[0031]
优选的,s4中无人艇通过雷达等传感器获取目标船只的位置和航向,由避碰策略做出决策,指导无人艇在下一时刻t 1的运动。
[0032]
与现有技术相比,本发明的有益效果是:
[0033]
1、本方法假设目标船舶的行为是随机的,这更贴合实际复杂场景;
[0034]
2、局部最小搜索的代价函数和概率地图离散化方法不需要太多的计算能力,易于实际应用;
[0035]
3、可轻松处理多随机目标船只的避碰。
附图说明
[0036]
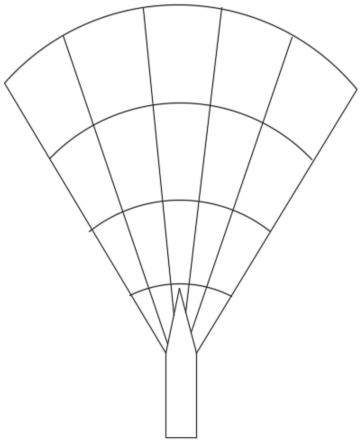
图1为无人艇在下一时刻的位置分布扇形图;
[0037]
图2为本发明实施例1仿真结果示意图;
[0038]
图3为本发明实施例2仿真结果示意图;
[0039]
图4为本发明实施例3仿真结果示意图。
具体实施方式
[0040]
(1)建立无人艇下一时刻位置的概率分布模型
[0041]
如图1所示,从概率角度来分析,无人艇下一时刻的位置位于前方某一个扇形区域内,假设目标船的航向角和速度在一定范围内是随机的,由于存在物理约束,因此目标船只的航向角和航速是缓慢变化的,不可能出现突变。定义航向角的概率分布是正态分布,公式如下:其中是是航向角,是是航向角的方差;同样,航速
的概率分布可定义如下其中u代表船舶前进航速,σu是前进速度方差,u
crs
是巡航速度;
[0042]
(2)将概率地图离散化
[0043]
基于概率博弈论的避碰,需要将地图离散化,本方法只针对概率区域开展地图离散化,可降低计算难度,对于无人艇或目标船只来讲,具有如下物理约束:
[0044]
a.其航速具有上限,定义为定义为u
max
;
[0045]
b.航向角在短时间δt内不会产生突变,即
[0046]
基于上述两种约束,假设船只在地图上t时刻的位置是y(t),那么t 1时,船只的位置y(t 1)肯定是在以y(t)为圆心的扇形区域内,其极坐标形式表示形式为:且t 1时刻,船只位置y(t 1)的概率分布为:将扇形区域的径向距离分成n等份,将跨度角分成m等份,得到n
×
m个单元,如图1所示,成功将船只在下一时刻的位置y(t 1)离散化,定义离散单元为c
ij
,则t 1时刻该单元的条件概率分布为p[c
ij
(t 1)|y(t)]=p[ci(t 1)|y(t)
·
p[cj(t 1)|y(t)],其中i∈{1...n},j∈{1...m},ci(t 1)代表第i行的任意单元,cj(t 1)代表第j列的任意单元,结合上述算式得出如下算式,
[0047][0048]
将上述两算式相乘,得到任意单元的条件概率分布。
[0049]
(3)计算船只的绝对位置
[0050]
上述离散化的区域是以t时刻船只位置为圆心的扇形区域,要实现无人艇的避碰,需要建立绝对坐标,设单元格的位置是以它们的圆心为坐标,相对于t时刻位置的极矢量:转换成笛卡尔坐标系得到:
则船只在单元格c
ij
绝对位置为:y
cartes
(c
ij
,t)=y
cartes
(t) δy
cartes
(c
ij
,t),至此将船舶位置离散化并得到t 1时刻位置的概率,接下来设计避碰策略;
[0051]
(4)避碰策略
[0052]
s4中无人艇通过雷达等传感器获取目标船只的位置和航向,由避碰策略做出决策,指导无人艇在下一时刻t 1的运动,以达到避碰的目的,定义t时刻无人艇的前进速度和航向角为定义如下代价函数:
[0053]
其中w1和w2代表权重,d()代表两点之间距离。代价函数第一项用无人艇与目标船之间的距离,乘以目标艇所有地图离散点的概率,所有可能的组合都考虑进去,然后求倒数。第二项表示无人艇自身位置与其期望位置之间的距离,基于上述概率博弈理论与该代价函数,无人艇避碰策略流程如下所示:
[0054]
步骤1:采集目标船只的航行状态,航速、航向;
[0055]
步骤2:计算目标船只下一时刻所有可能的位置和概率;
[0056]
步骤3:计算出所有可能的ua(t)];
[0057]
步骤4:计算出代价函数cos[ua(t)]最小值时的ua(t)];
[0058]
步骤5:将ua(t)]传递给无人艇控制器,控制无人艇按照ua(t)]航行;
[0059]
步骤6:回到步骤1
[0060]
(5)仿真验证
[0061]
假设无人艇航行时,周围有2条随机航行的,它们的运动参数如表1所示,采样时间间隔为2秒,把c船作为主动船只,其他两条船作为被动船只,研究了三种不同避碰的情况。
[0062][0063][0064]
表1
[0065]
实施例1
[0066]
无人艇与目标船只对向航行
[0067]
无人艇从(0,0)位置向x正方向航行,目标船从(1500,30)位置向x负方向随机航行。从仿真结果如图2,无人艇实现了有效的避碰。
[0068]
实施例2
[0069]
无人艇与目标船只同向航行
[0070]
无人艇从(0,0)位置向x正方向航行,目标船从(200,30)位置向x正方向随机航行。从仿真结果如图3,虽然目标船在大概700米的位置对无人艇产生了干扰,但是无人艇实现了对其有效的避碰。
[0071]
实施例3
[0072]
无人艇规避两条目标船
[0073]
无人艇从(0,0)位置向x正方向航行,目标船a从(200,30)位置随机航行,目标船b从(1000,-20)位置随机航行,如图4所示,无人艇航行时实现了对两个随机目标船只的有效避碰。
[0074]
由仿真结果可知,在本发明所涉及的基于概率博弈论框架的避碰方法下,无人艇能够实现对随机船只的有效避碰。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。