1.本发明涉及一种浪高仪支架控制系统,具体地说,涉及一种可自动调整的浪高仪支架控制系统及控制方法。
背景技术:
2.在船舶与海洋工程试验领域,想了解船舶、海洋结构物、防波堤等耐波性,很多试验都需要对水面波浪的浪高进行测量分析,波浪实验是海洋、河口海岸、港航、船舶以及水利等工程设计的重要组成部分。浪高仪是常用的一种波浪测量仪器,在船舶模型试验中应用广泛。
3.目前在实验室里进行模型波浪试验前,需要先做各项试验准备工作,其中就包括把浪高仪固定在支架上,放置在水池需要测量波高的地方。浪高仪固定在支架上的高度一般是根据水池放水的水深来确定的,确保放水完毕后水面处于浪高仪钽丝的中间位置。如果试验过程中需要改变水深,那就需要对水池进行加水或放水的操作,一般需要安排试验人员穿上防水服下水去重新调整浪高仪固定的高度,或者把整个支架拿出水池,调整完固定高度后再次布置到水池中。无论哪种方式都比较费时费力,增加试验的时间和人力成本。
4.如何针对模型试验水池在试验时需要改变水深的这种情况,设计一种能够根据水池水深自动调整高度的浪高仪支架,是一个值得探讨的问题。
技术实现要素:
5.本发明的目的在于,针对模型试验水池在试验时需要改变水深的这种情况,设计一种能够根据水池水深自动调整高度的浪高仪支架控制系统及控制方法。
6.本发明能够实现水池实验室用浪高仪测量波浪高度时,当水池的水深改变后,浪高仪支架控制系统能够根据水池水深自动调整高度,使水面始终保持在浪高仪钽丝的中间位置。
7.为达到上述目的,本发明采用以下技术方案予以实现:一种可自动调整的浪高仪支架控制系统,包括浪高仪、浪高采集模块、超声波液位传感器、浪高仪支架控制模块、浪高仪支架模组、蜂鸣器,所述浪高仪支架模组由支架、伺服电动缸、伺服电机、伺服电机驱动器、编码器、丝杆、固定部件构成。
8.上述浪高仪为数字电容式浪高仪或模拟电容式浪高仪,与浪高采集模块相连,用于向浪高采集模块传输浪高数据;上述浪高采集模块与浪高仪支架控制模块相连,用于将采集到的浪高数据传输给浪高仪支架控制模块;上述超声波液位传感器与浪高仪支架控制模块相连,用于向浪高仪支架控制模块传输液位高度数据;上述蜂鸣器与浪高仪支架控制模块相连,用于接收浪高仪支架控制模块的控制信号;
上述支架由底盘和与底盘垂直相连接的支柱构成,放置于试验水池中需要测量波高的地方;上述伺服电动缸通过支柱中上端的悬架与支架相连;上述伺服电机通过支柱上端的悬架与支架相连;上述伺服电机下端并列安置有伺服电机驱动器和编码器,其中伺服电机驱动器用于驱动伺服电机,编码器用于信号反馈,形成闭环控制;上述伺服电机驱动器、编码器与浪高仪支架控制模块相连,用于接收浪高仪支架控制模块的控制信号;上述丝杆位于伺服电动缸的内部,下端与固定部件相连,用于上下移动浪高仪的位置;上述固定部件用于连接固定浪高仪和超声波液位传感器。
9.本发明另提供一种可自动调整的浪高仪支架控制模块的控制方法,该方法包括:步骤一:试验开始前,把浪高仪支架模块放置于水池中的浪高测量点位,利用固定部件连接固定好浪高仪和超声波液位传感器,启动浪高仪支架控制模块,系统初始化后自动把丝杆上升到最高位置后进入待机模式;步骤二:试验水池放好水后,操控浪高仪支架控制模块进入试验监控模式;步骤三:浪高仪支架控制模块开始不断监测浪高采集模块传送的浪高仪数据,同时初始化超声波液位传感器,能够读取液位高度数据;步骤四:浪高仪支架控制模块发送控制指令给伺服电机驱动器,伺服电机驱动器驱动伺服电机转动,使伺服电动缸的丝杆缓慢向下运动;步骤五:当浪高仪接触水面,浪高仪支架控制模块监测到开始出现稳定的浪高数据信号时,立即读取超声波液位传感器的液位高度数据,并存储为h
low
;步骤六:丝杆继续缓慢向下运动,浪高仪支架控制模块继续监测采集到的浪高数据;步骤七:当浪高仪支架控制模块监测到浪高数据信号稳定在某个数值附近则立即发送控制指令给伺服电机驱动器,使伺服电机停止转动;步骤八:浪高仪支架控制模块读取超声波液位传感器的液位高度数据,并存储为h
high
;步骤九:浪高仪支架控制模块计算需要下移的高度h =(h
high-h
low
)/ 2,发送控制指令给伺服电机驱动器,伺服电机驱动器驱动伺服电机转动,使伺服电动缸的丝杆缓慢向下运动;步骤十:浪高仪支架控制模块接收编码器的反馈信号,精确控制丝杆向下运动h的位移量,然后发送控制指令给伺服电机驱动器,使伺服电机停止转动,保证试验水池液面基本处于浪高仪钽丝的中间位置;步骤十一:浪高仪支架控制模块读取超声波液位传感器的液位高度数据,并存储为hs;步骤十二:试验过程中浪高仪支架控制模块每隔三分钟读取一次超声波液位传感器的液位高度数据,并存储为h
t
,若| h
t ‑ꢀhs |大于阈值t,且不断变大,则浪高仪支架控制模块发送控制指令给伺服电机驱动器,伺服电机驱动器驱动伺服电机转动,使伺服电动缸
的丝杆上升到最高位置,浪高仪支架控制模块使蜂鸣器发出5秒警报声作为提醒;步骤十三:浪高仪支架控制模块继续监测超声波液位传感器的液位高度数据,若连续10次读取的液位高度数据都稳定在某个数值附近且误差小于阈值t,则转到步骤四;步骤十四:若浪高仪处于试验状态下,且浪高仪支架控制模块连续10次读取的液位高度数据都稳定在某个数值附近且误差小于阈值t,则浪高仪支架控制模块发送控制指令给伺服电机驱动器,伺服电机驱动器驱动伺服电机转动,使伺服电动缸的丝杆上升到最高位置后进入待机状态。
10.本发明相对现有技术所具有的特点和有益效果主要是:1、能够实现水池实验室用浪高仪测量波浪高度时,当水池的水深改变后,浪高仪支架控制模块能够根据水池水深自动调整高度,使水面始终保持在浪高仪钽丝的中间位置。
11.2、不需要试验人员穿上防水服进入水池调整浪高仪,节省试验中的人力资源和时间。
12.3、随时能够监测水池的液位高度,试验中水位发生变化会报警提醒。
13.4、阶段性试验做完后能够自动升起浪高仪进入待机状态,可以延长浪高仪的使用寿命。
附图说明
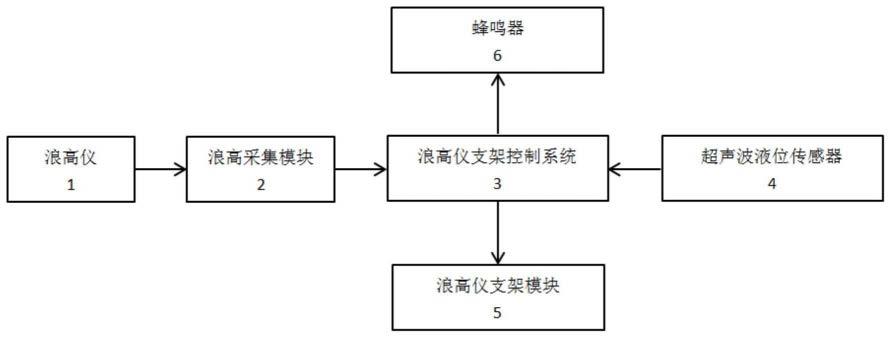
14.图1是本发明的一种可自动调整的浪高仪支架控制系统的构成示意框图;图2是浪高仪支架模组的结构示意图;图3是一种可自动调整的浪高仪支架控制系统的控制方法流程框图。
具体实施方式
15.下面结合附图和具体实施例对本发明的一种可自动调整的浪高仪支架控制系统及控制方法作进一步说明,本发明也可有其他不同的具体实施例来加以说明或实施,任何本领域技术人员在权利要求范围内做的等同变换均属于本发明的保护范畴。
16.如图1所示,为本发明的一种可自动调整的浪高仪支架控制系统,包括浪高仪1、浪高采集模块2、浪高仪支架控制模块3、超声波液位传感器4、浪高仪支架模组5、蜂鸣器6,所述浪高仪支架模组5由支架5-1、伺服电动缸5-2、伺服电机5-3、伺服电机驱动器5-4、编码器5-5、丝杆5-6、固定部件5-7构成。
17.上述浪高仪1为数字电容式浪高仪或模拟电容式浪高仪,与浪高采集模块2相连,用于向浪高采集模块2传输浪高数据;上述浪高采集模块2与浪高仪支架控制模块3相连,用于将采集到的浪高数据传输给浪高仪支架控制模块3;上述超声波液位传感器4与浪高仪支架控制模块3相连,用于向浪高仪支架控制模块3传输液位高度数据;上述蜂鸣器6与浪高仪支架控制模块3相连,用于接收浪高仪支架控制模块3的控制信号;上述支架5-1由底盘和与底盘垂直相连接的支柱构成,放置于试验水池中需要测
量波高的地方;上述伺服电动缸5-2通过支柱中上端的悬架与支架5-1相连;上述伺服电机5-3通过支柱上端的悬架与支架5-1相连;上述伺服电机5-3下端并列安置有伺服电机驱动器5-4和编码器5-5,其中伺服电机驱动器5-4用于驱动伺服电机5-3,编码器5-5用于信号反馈,形成闭环控制;上述伺服电机驱动器5-4、编码器5-5与浪高仪支架控制模块3相连,用于接收浪高仪支架控制模块3的控制信号;上述丝杆5-6位于伺服电动缸5-2的内部,下端与固定部件5-7相连,用于上下移动浪高仪1的位置;上述固定部件5-7用于连接固定浪高仪1和超声波液位传感器4。
18.本实施例中,浪高仪1优选地采用优力德uld数字电容式浪高仪,浪高仪支架控制模块3为安装了浪高仪支架控制程序的工控机系统,超声波液位传感器4优选地采用 美控mik-dp传感器。具体实施流程如下:步骤一:试验开始前,把浪高仪支架模块5放置于水池中的浪高测量点位,利用固定部件5-7连接固定好浪高仪1和超声波液位传感器4,启动浪高仪支架控制模块3,系统初始化后自动把丝杆5-6上升到最高位置后进入待机模式;步骤二:试验水池放好水后,操控浪高仪支架控制模块3进入试验监控模式;步骤三:浪高仪支架控制模块3开始不断监测浪高采集模块2传送的浪高仪1数据,同时初始化超声波液位传感器4,能够读取液位高度数据;步骤四:浪高仪支架控制模块3发送控制指令给伺服电机驱动器5-4,伺服电机驱动器5-4驱动伺服电机5-3转动,使伺服电动缸5-2的丝杆5-6缓慢向下运动;步骤五:当浪高仪1接触水面,浪高仪支架控制模块3监测到开始出现稳定的浪高数据信号时,立即读取超声波液位传感器4的液位高度数据,并存储为h
low
;步骤六:丝杆5-6继续缓慢向下运动,浪高仪支架控制模块3继续监测采集到的浪高数据;步骤七:当浪高仪支架控制模块3监测到浪高数据信号稳定在某个数值附近则立即发送控制指令给伺服电机驱动器5-4,使伺服电机5-3停止转动;步骤八:浪高仪支架控制模块3读取超声波液位传感器4的液位高度数据,并存储为h
high
;步骤九:浪高仪支架控制模块3计算需要下移的高度h =(h
high-h
low
)/ 2,发送控制指令给伺服电机驱动器5-4,伺服电机驱动器5-4驱动伺服电机5-3转动,使伺服电动缸5-2的丝杆5-6缓慢向下运动;步骤十:浪高仪支架控制模块3接收编码器5-5的反馈信号,精确控制丝杆5-6向下运动h的位移量,然后发送控制指令给伺服电机驱动器5-4,使伺服电机5-3停止转动,保证试验水池液面基本处于浪高仪1钽丝的中间位置;步骤十一:浪高仪支架控制模块3读取超声波液位传感器4的液位高度数据,并存储为hs;步骤十二:试验过程中浪高仪支架控制模块3每隔三分钟读取一次超声波液位传感器4的液位高度数据,并存储为h
t
,若| h
t ‑ꢀhs |大于阈值t,且不断变大,则浪高仪支架控
制模块3发送控制指令给伺服电机驱动器5-4,伺服电机驱动器5-4驱动伺服电机5-3转动,使伺服电动缸5-2的丝杆5-6上升到最高位置,浪高仪支架控制模块3使蜂鸣器6发出5秒警报声作为提醒;步骤十三:浪高仪支架控制模块3继续监测超声波液位传感器4的液位高度数据,若连续10次读取的液位高度数据都稳定在某个数值附近且误差小于阈值t,则转到步骤四;步骤十四:若浪高仪1处于试验状态下,且浪高仪支架控制模块3连续10次读取的液位高度数据都稳定在某个数值附近且误差小于阈值t,则浪高仪支架控制模块3发送控制指令给伺服电机驱动器5-4,伺服电机驱动器5-4驱动伺服电机5-3转动,使伺服电动缸5-2的丝杆5-6上升到最高位置后进入待机状态。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。