技术特征:
1.一种基于概率博弈论框架的无人艇自动避碰方法,其特征在于:包括如下步骤:s1.建立概率分布模型;s2.将概率地图离散化;s3.计算船只的绝对位置;s4.设计避碰方案,包括如下步骤:1)采集目标船只的航行状态,航速、航向;2)计算目标船只下一时刻所有可能的位置和概率,算式如下:p[c
ij
(t 1)|y(t)]=p[c
i
(t 1)|y(t)
·
p[c
j
(t 1)|y(t)];y
cartes
(c
ij
,t 1)=y
cartes
(t)
△
y
cartes
(c
ij
,t)3)计算出所有可能的前进速度和航向角,4)计算出代价函数cos[u
a
(t)]最小值时的u
a
(t),代价函数如下5)将u
a
(t)传递给无人艇控制器,控制无人艇按照u
a
(t)航行;6)回到步骤1)。2.根据权利要求1所述的一种基于概率博弈论框架的无人艇自动避碰方法,其特征在于:s1中建立概率分布模型中,假设目标船的航向角和速度在一定范围内是随机的,由于存在物理约束,因此目标船只的航向角和航速是缓慢变化的,不可能出现突变,定义航向角的概率分布是正态分布,公式如下:其中是是航向角,是是航向角的方差;航速的概率分布如下:其中u代表船舶前进航速,σ
u
是前进速度方差,u
crs
是巡航速度。3.根据权利要求2所述的一种基于概率博弈论框架的无人艇自动避碰方法,其特征在于:s2中将概率地图离散化,基于概率博弈论的避碰,将地图离散化,只针对概率区域开展地图离散化,对于无人艇或目标船只来讲,具有如下物理约束,其航速具有上限,定义为u
max
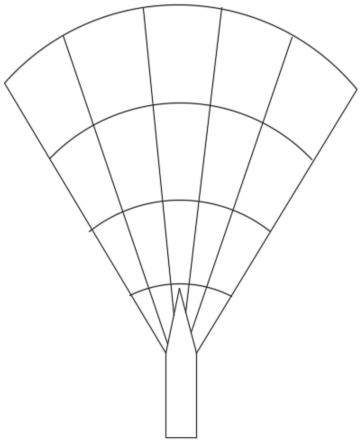
,航向角在短时间δt内不会产生突变,即基于上述两种约束,假设船只在地图上t时刻的位置是y(t),那么t 1时,船只的位置y(t 1)肯定是在以y(t)为圆心的扇形区域内,其极坐标形式表示形式为:且t 1时刻,船只位置y(t 1)的概率分布为:将扇形区域的径向距离分成n等份,将跨度角分成m等份,得到n
×
m个单元,定义离散单元为c
ij
,则t 1时刻该单元的条件概率分布为:p[c
ij
(t 1)|y(t)]=p[c
i
(t 1)|y(t)
·
p[c
j
(t 1)|y(t)]其中i∈{1...n},j∈{1...m},c
i
(t 1)代表第i行的任意单元,c
j
(t 1)代表第j列的任
意单元,结合上述算式得出如下算式:意单元,结合上述算式得出如下算式:将上述算式相乘,得到条件概率分布。4.根据权利要求3所述的一种基于概率博弈论框架的无人艇自动避碰方法,其特征在于:上述离散化的区域是以t时刻船只位置为圆心的扇形区域,要实现无人艇的避碰,需要建立绝对坐标,s3中设单元格的位置是以它们的圆心为坐标,相对于时刻位置的极矢量:转换成笛卡尔坐标系得到:则船只在单元格c
ij
绝对位置为:y
cartes
(c
ij
,t)=y
cartes
(t) δy
cartes
(c
ij
,t),至此将船舶位置离散化并得到t 1时刻位置的概率。5.根据权利要求4所述的一种基于概率博弈论框架的无人艇自动避碰方法,其特征在于:s4中无人艇通过雷达等传感器获取目标船只的位置和航向,由避碰策略做出决策,指导无人艇在下一时刻t 1的运动。
技术总结
本发明提供一种基于概率博弈论框架的无人艇自动避碰方法,涉及无人艇领域,包括如下步骤:建立概率分布模型、将概率地图离散化、计算船只的绝对位置、设计避碰方案,其中设计规避方案包括如下步骤:采集目标船只的航行状态、航速、航向,计算目标船只下一时刻所有可能的位置和概率,计算出所有可能的前进速度和航向角,计算出代价函数Cos[u
技术研发人员:王健 汪俊 梁晓锋 易宏
受保护的技术使用者:上海交通大学
技术研发日:2022.06.06
技术公布日:2022/8/9
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。