1.本发明属于航空航天技术领域中,具体涉及一种适用于微纳卫星自组装的相对位姿测量及靶标设计方法。
背景技术:
2.现有技术中,使用多个微纳卫星在轨组装完成大卫星功能是当前航天器发展的热点之一。在空间中微纳卫星自组装时,需要获取卫星的相对位姿参数,受限于微纳卫星的尺寸体积,通常采用视觉相机加合作靶标的模式进行位姿测量。
3.当前相对位姿解算大多采用pnp算法进行求解,该算法计算过程复杂,不利于硬件移植;且该算法需提供位姿初值,位姿初值的获取通常采用卡尔曼滤波、迭代的非线性最小二乘法等,上述方法无法收敛到全局最小,会对测量精度造成影响。
4.目前合作靶标图案通常固定在某一位置,无法满足飞行器多面体宽适应组装的需求。故而合作靶标的方案设计存在以下难点:1、飞行器通常为多面体,应确保在任意位置视觉相机始终能拍摄到足够特征点的合作靶标图案;2、不同面的合作靶标图案应具备区分性;3、合作靶标图案应适应飞行器外形特征。
技术实现要素:
5.为解决上述技术问题,本发明提供一种适用于微纳卫星自组装的相对位姿测量及靶标设计方法,其可适应飞行器多面体结构,以及解决现有技术位姿解算方法计算过程复杂的问题。
6.为达到上述目的,本发明所采取的技术方案是:一种适用于微纳卫星自组装的相对位姿测量及靶标设计方法,包括如下步骤:(1)获取相对位姿数据集;(2)利用所述相对位姿数据集在地面上完成神经网络的训练,获得位姿计算神经网络;(3)调整视觉相机,使其与所述合作靶标的工作距离为0.1m~3m,使得所述合作靶标的图案的四个靶标圆始终在所述视觉相机的视场内;(4)获取所述合作靶标的图像,对其进行二值化处理;(5)通过图像处理系统对所述步骤(4)中的二值化的图像进行边缘检测,识别所述合作靶标的图案的四个靶标圆,计算得到所述靶标圆的圆心坐标;(6)计算每个所述靶标圆轮廓内像素总数,即为该靶标圆的面积,将所述面积最大的圆编码为
‘1’
,并按面积从大到小的排布,将其他三个靶标圆分别编码为
‘2’
、
‘3’
、
‘4’
,将
‘1’
作为起始点,按逆时针方向输出所述靶标圆的排布编码;(7)根据靶标圆的排布编码确定对应子区域;(8)将所述靶标圆的圆心坐标及所述对应子区域圆心坐标输入位姿计算神经网络,计算得到相对位姿初始值;
(9)对所述相对位姿初始值进行迭代运算,计算得到相对位姿最终值。
7.进一步地,所述步骤(8)中,将所述靶标圆的圆心坐标及对应子区域圆心坐标输入所述步骤(2)中获得的位姿计算神经网络,计算得到相对位姿,作为相对位姿测量的初始值。
8.进一步地,所述步骤(9)中,将所述步骤(8)中获取的相对位姿初始值代入haralick迭代算法,进一步求解相对位姿,经过反复迭代后获取高精度的相对位姿信息,作为相对位姿最终值。
9.有益效果:本发明的适用于微纳卫星自组装的相对位姿测量及靶标设计方法,能够弥补当前靶标无法适应飞行器多面体结构的不足,且该相对位姿测量方法的计算简单,迁移性高,容易在硬件上实现,计算速度快,可实现高帧频输出。
附图说明
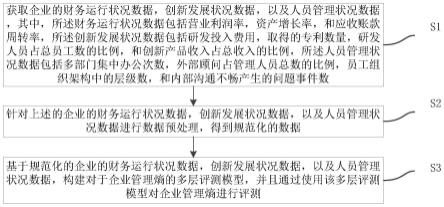
10.图1为本发明的微纳卫星分离示意图;图2为本发明的相对位姿测量方法流程图;图3为本发明的子区域1的靶标图案结构图;图4为本发明的子区域2的靶标图案结构图;图5为本发明的子区域3的靶标图案结构图;图6为本发明的子区域4的靶标图案结构图。
具体实施方式
11.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。如图1所示,其为本发明的微纳卫星分离示意图,微纳卫星包括飞行器a和 b,其中飞行器a和b均包括多个子区域。
12.如图3-6所示,其为合作靶标的图案,所述合作靶标的图案设置为围绕飞行器侧面的带状区域,并将其划分为4个子区域,每个子区域位于飞行器的一个侧面上。
13.每个子区域的图案设置为四个面积大小不同的圆,四个圆的圆半径从大到小依次为40mm、35mm、30mm、25mm,相邻圆的圆心间距为120mm。按面积从大到小的排布将四个圆分别编码为
‘1’
、
‘2’
、
‘3’
、
‘4’
。编码时以
‘1’
为起始点,按逆时针方向输出编码顺序,比如,图3所示的编码顺序为
‘
1324’;图4所示的编码顺序为
‘
1234’;图5所示的编码顺序为
‘
1423’;图6所示的编码顺序为
‘
1432’。不同子区域中,所述合作靶标的图案的靶标圆的排布编码不同,使其具有唯一可识别性。
14.如图2所示,本发明的相对位姿测量方法具体包括如下步骤:(1)获取相对位姿数据集;(2)利用所述相对位姿数据集在地面上完成神经网络的训练,获得位姿计算神经网络;(3)调整视觉相机,使其与所述合作靶标的工作距离为0.1m~3m,使得所述合作靶
标的图案的四个靶标圆始终在所述视觉相机的视场内;(4)获取所述合作靶标的图像,对其进行二值化处理;(5)通过图像处理系统对所述步骤(4)中的二值化的图像进行边缘检测,识别所述合作靶标的图案的四个靶标圆,计算得到所述靶标圆的圆心坐标;(6)计算每个所述靶标圆轮廓内像素总数,即为该靶标圆的面积,将所述面积最大的圆编码为
‘1’
,并按面积从大到小的排布,将其他三个靶标圆分别编码为
‘2’
、
‘3’
、
‘4’
,各子区域将
‘1’
作为起始点,按逆时针方向输出所述靶标圆的排布编码;(7)根据靶标圆的排布编码确定对应子区域;(8)将所述靶标圆的圆心坐标及所述对应子区域的圆心坐标输入步骤(2)中的位姿计算神经网络,计算得到相对位姿初始值;(9)对所述相对位姿初始值进行迭代运算,计算得到相对位姿最终值。其中,将所述步骤(8)中获取的相对位姿初始值代入haralick迭代算法,进一步求解相对位姿,经过反复迭代后获取高精度的相对位姿信息,作为相对位姿最终值。
15.本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
技术特征:
1.一种适用于微纳卫星自组装的相对位姿测量及靶标设计方法,其特征在于,包括如下步骤:(1)获取相对位姿数据集;(2)利用所述相对位姿数据集在地面上完成神经网络的训练,获得位姿计算神经网络;(3)调整视觉相机,使其与所述合作靶标的工作距离为0.1m~3m,使得所述合作靶标的图案的四个靶标圆始终在所述视觉相机的视场内;(4)获取所述合作靶标的图像,对其进行二值化处理;(5)通过图像处理系统对所述步骤(4)中的二值化的图像进行边缘检测,识别所述合作靶标的图案的四个靶标圆,计算得到所述靶标圆的圆心坐标;(6)计算每个所述靶标圆轮廓内像素总数,即为该靶标圆的面积,将所述面积最大的圆编码为
‘1’
,并按面积从大到小的排布,将其他三个靶标圆分别编码为
‘2’
、
‘3’
、
‘4’
,将
‘1’
作为起始点,按逆时针方向输出所述靶标圆的排布编码;(7)根据靶标圆的排布编码确定对应子区域;(8)将所述靶标圆的圆心坐标及所述对应子区域的圆心坐标输入位姿计算神经网络,计算得到相对位姿初始值;(9)对所述相对位姿初始值进行迭代运算,计算得到相对位姿最终值。2.根据权利要求1所述的适用于微纳卫星自组装的相对位姿测量及靶标设计方法,其特征在于:所述步骤(8)中,将所述靶标圆的圆心坐标及对应子区域的圆心坐标输入所述步骤(2)中获得的位姿计算神经网络,计算得到相对位姿,作为相对位姿测量的初始值。3.根据权利要求2所述的适用于微纳卫星自组装的相对位姿测量及靶标设计方法,其特征在于:所述步骤(9)中,将所述步骤(8)中获取的相对位姿初始值代入haralick迭代算法,进一步求解相对位姿,经过反复迭代后获取高精度的相对位姿信息,作为相对位姿最终值。
技术总结
本发明提供一种适用于微纳卫星自组装的相对位姿测量及靶标设计方法,其包括:获取相对位姿数据集;获得最优神经网络;调整视觉相机;获取所述合作靶标的图像,对其进行二值化处理;计算得到靶标圆的圆心坐标;按逆时针方向输出所述靶标圆的排布编码;根据靶标圆的排布编码确定对应子区域;将所述靶标圆的圆心坐标及所述对应子区域圆心坐标输入神经网络,计算得到相对位姿初始值;对所述相对位姿初始值进行迭代运算,计算得到相对位姿最终值。本发明能够解决当前靶标无法适应飞行器多面自组织对接的不足,且该相对位姿测量方法的计算简单,迁移性高,容易在硬件上实现,计算速度快,可实现高帧频输出。可实现高帧频输出。可实现高帧频输出。
技术研发人员:徐安林 张强 刘念 范城城 丁国鹏 梁小虎 郝万宏 陈昊
受保护的技术使用者:中国人民解放军63921部队
技术研发日:2022.05.10
技术公布日:2022/8/9
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。