1.本发明属于人工智能及自动驾驶技术领域,更具体涉及一种基于目标检测的预标注方法及存储介质。
背景技术:
2.人工智能是利用数字计算机或由数字计算机控制的机器,模拟、延伸和扩展人类智能,感知环境,获取知识,并利用知识获得最佳结果的理论、方法、技术和应用系统。换句话说,人工智能是计算机科学的一个分支,它试图理解智能的本质,并产生一种能够以类似于人类智能的方式做出反应的新型智能机器。人工智能就是研究各种智能机器的设计原理和实现方法,使机器具有感知、推理和决策的功能。人工智能领域的研究包括机器学习、自然语言处理、计算机视觉、决策与推理、人机交互、推荐与搜索、人工智能基础理论等。
3.一个可以投入应用的深度学习模型,需要经过模型建立和模型训练的过程。在模型训练过程中,通常需要收集大量的样本数据并对样本数据进行标注,并将每个样本数据和对应的标注结果作为一组训练样本来训练建立的模型。可见,样本标注是模型训练中必不可少的一步。
4.但是,这种工作流程存在以下问题:1、数据集类别繁多,数据量巨大,人工标注时间和人力成本高;2、数据标注准确性得不到保证。在真实的应用场景下,数据集、数据类别是经常发生改变的,需要大量的人员耗时耗力处理维护。因此,常见的目标检测流程得到的模型训练和迁移不够灵活,难以适应实际应用上速度的需要。
5.如我国专利cn111191732b公开了一种基于全自动学习的目标检测方法,该方法利用预处理后的小规模的人工标注数据集,使用深度神经网络进行模型的训练,获取深度模型,再通过自监督伪标注和主动学习样本选择,联合学习深度神经网络预测,将伪标签分配给高置信度样本。该方法不具备针对性,在只针对目标检测标注时效率较低,无法满足大批量标注需求。
6.又如我国专利cn112740230a公开了一种数据标注系统、方法和数据标注管理器,该系统建立目标计算单元,获取标注模型基础参数数据的存储路径信息并发送至目标计算单元。目标计算单元通过存储路径信息,在标注模型存储仓库中获取标注模型的基础参数数据,将目标模型推理框架和标注模型的基础参数数据组合成标注模型,对待标注数据进行标注。该方法仅使用标注模型对待标注模型进行标注,标注后未对模型进行修正,后续标注效果无法得到改善。
技术实现要素:
7.为解决上述问题,本发明提供了一种基于目标检测的预标注方法及存储介质,解决了在实际场景下,常用的目标检测标注人力成本过高,训练模型适应能力差的问题。
8.为了解决上述技术问题,本发明采用的技术方案是这样的:一种基于目标检测的预标注方法,包括以下步骤,
s1、对小规模的原始数据进行数据甄别;s2、对经过数据甄别的原始数据进行标注,作为训练数据;s3、采用所述训练数据对基础目标检测模型进行训练,获取深度模型,并将该深度模型分化为预标注模型和传感器模型;s4、通过所述预标注模型对后续的大规模原始数据进行预标注,形成标注后的训练数据;s5、将标注后的训练数据输入预标注模型和传感器模型,进行模型提升训练。
9.作为优化,步骤s1包括通过抽帧和/或场景自动分类和/或主动识别异常场景对小规模的原始数据进行数据甄别。
10.作为优化,步骤s2包括,s201、对经过数据甄别的原始数据进行数据预处理;s202、对预处理后的数据进行人工拉框标注,作为训练数据。
11.作为优化,步骤s3中,所述训练数据通过深度学习算法对基础目标检测模型进行训练,所述深度学习算法包括卷积神经网络。
12.作为优化,步骤s4还包括对预标注的大规模原始数据进行人工筛选修正,形成标注后的训练数据。
13.作为优化,所述深度模型包括yolo模型。
14.作为优化,所述yolo模型的参数设置包括,epochs为40次,img-size为1280x1280,batch-size为8。
15.基于上述方法,本发明还提供了一种存储介质,所述存储介质存储有一个或者多个程序,所述一个或者多个程序被处理器运行时,执行所述的基于目标检测的预标注方法的步骤。
16.与现有技术相比,本发明具有如下优点:1、本发明将卷积神经网络与主动学习配合使用,形成了一种自动标注目标检测的方法;2、本发明利用小规模原始图像数据,通过主动学习和自动标注已有数据,减少模型过拟合的可能性,兼顾整个样本的分布特征,迭代地进行模型训练,将新样本加入数据集迭代训练,从而训练理想精度的目标检测识别模型,提高类别发生变化时模型迁移后精度和算法的快速适应能力;3、本发明相比其他方法实现了自动扩展标注样本进行训练,方便获得大规模标注数据集,可以大大减少人工标注的时间和经济成本,保证了标注的有效性和高效性;4、本发明可以应用于自动驾驶领域。
附图说明
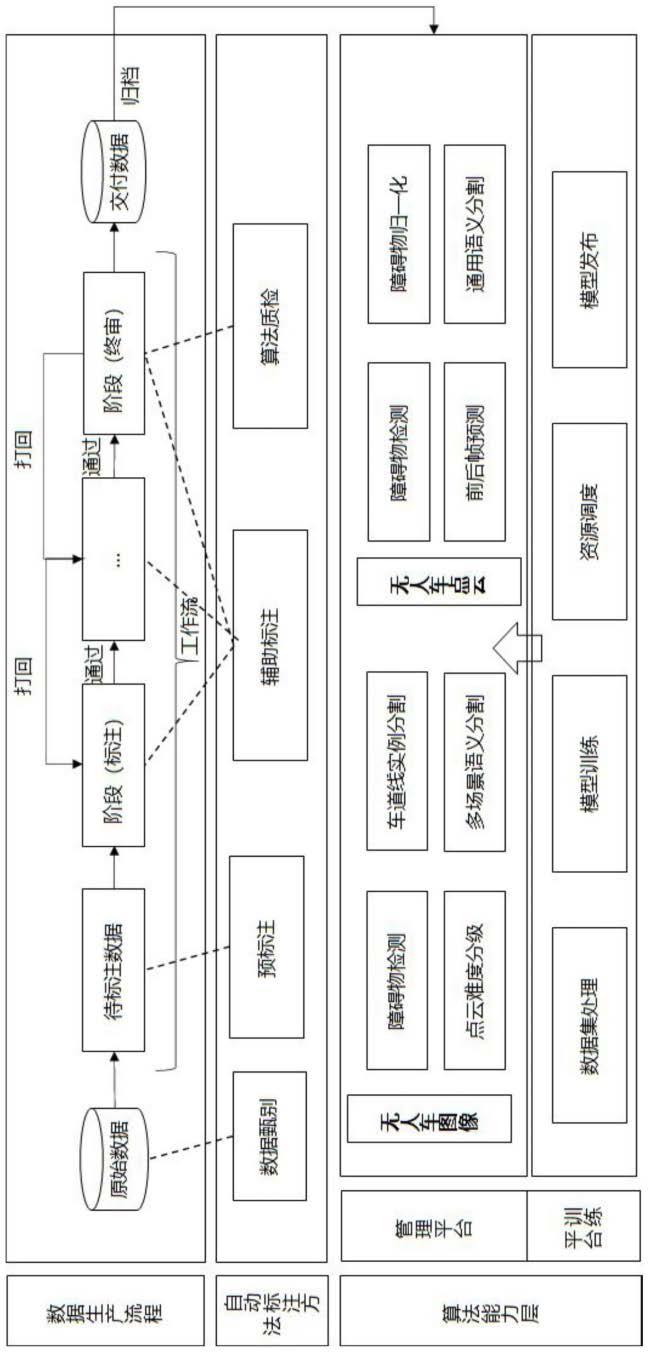
17.图 1为基于ai辅助智能标注的落地框架示意图;图 2为基于目标检测的预标注方法流程图;图 3为数据集大小对不同规模神经网络的影响;图 4-图6为yolo v5 1.0的网络结构图。
具体实施方式
18.下面将结合附图及实施例对本发明作进一步说明。
19.实施例:参见图1-图6,一种基于目标检测的预标注方法,包括以下步骤,s1、对小规模的原始数据进行数据甄别。包括但不限于利用抽帧提升场景变化程度,通过场景自动分类建立场景库,主动识别异常场景补充corner case等方式,减少待标注数据。
20.s2、对经过数据甄别的原始数据进行标注,作为训练数据。利用从s1中甄别到的数据,首先进行数据清洗、去畸变等数据预处理工作,然后进行图像2d拉框标注,作为训练数据。
21.s3、采用所述训练数据对基础目标检测模型进行训练,获取深度模型,并将该深度模型分化为预标注模型和传感器模型。深度学习算法包括但不限于卷积神经网络,利用s2的训练数据,对imagenet数据集训练的模型进行微调,获取深度模型。再将深度模型分化为预标注模型和传感器模型,后续利用预标注模型进行数据预标注。这里的深度模型使用yolov5 1.0模型,具体参数设置如下:epochs(训练轮数),设置为40次;img-size(输入图片分辨率),一般情况下较大的分辨率效果好,但是分辨率提高,fps会降低,设置为1280x1280;batch-size:根据gpu显存配置,设置为8。
22.s4、通过所述预标注模型对后续的大规模原始数据进行预标注,形成标注后的训练数据。利用预标注模型的深度网络对后续原始数据进行网络训练的预标注数据,经过人工筛选修正得到标注后的训练数据。
23.s5、将标注后的训练数据输入预标注模型和传感器模型,进行模型提升。
24.基于上述方法,本发明还提供了一种存储介质,所述存储介质存储有一个或者多个程序,所述一个或者多个程序被处理器运行时,执行所述的基于目标检测的预标注方法的步骤。
25.本发明,1、将卷积神经网络与主动学习配合使用,形成了一种自动标注目标检测的方法;2、利用小规模原始图像数据,通过主动学习和自动标注已有数据,减少模型过拟合的可能性,兼顾整个样本的分布特征,迭代地进行模型训练,将新样本加入数据集迭代训练,从而训练理想精度的目标检测识别模型,提高类别发生变化时模型迁移后精度和算法的快速适应能力;3、相比其他方法实现了自动扩展标注样本进行训练,方便获得大规模标注数据集,可以大大减少人工标注的时间和经济成本,保证了标注的有效性和高效性;4、可以应用于自动驾驶领域。
26.最后需要说明的是,以上实施例仅用以说明本发明的技术方案而非限制技术方案,本领域的普通技术人员应当理解,那些对本发明的技术方案进行修改或者等同替换,而不脱离本技术方案的宗旨和范围,均应涵盖在本发明的权利要求范围当中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
