1.本发明属于自动控制技术领域,涉及一种动平台两轴光电搜索系统在方位高速旋转下的俯仰稳定控制方法。
背景技术:
2.光电搜索系统以其被动探测方式,较好的隐身能力,不易受到攻击等特点,成为雷达探测的重要补充手段,也是信息战尤其是光电对抗的重要组成部分。目前光电搜索系统结构形式通常采用两轴地平式结构,如图2所示,该类型的光电搜索系统通过方位旋转,达到水平向360
°
视场覆盖,为了提高搜索效率,在系统允许范围内,要求方位旋转速率尽可能高,力求使光电搜索系统在短时间内覆盖较大空间,目前光电搜索系统旋转速度通常大于120
°
/s,甚至更高。
3.另一方面,光电搜索系统要求在方位旋转过程中,光轴扫过平面保持水平,以防止漏扫及便于后端数据处理。如果是静平台安装,可以通过基座调平使俯仰稳定轴与俯仰旋转轴一致,从而使方位旋转工况下,光轴扫过平面保持水平;动平台工况下,为了使光轴扫过的平面保持水平,光电搜索系统需要使俯仰持续锁定在惯性系下某一角度,但动平台下由于基座倾斜,及方位机构位置变化,使俯仰旋转轴(陀螺敏感轴)与俯仰稳定轴(俯仰旋转轴在水平面上的投影)不一致,如图3所示,从而使方位旋转运动在俯仰稳定轴上产生了运动分量,另一方面,由于方位旋转轴与俯仰旋转轴正交,俯仰陀螺无法敏感到该分量,所以无法通过陀螺速率反馈抑制该分量对俯仰稳定轴的扰动。位置环带宽低,又无法完全抑制该扰动,如果不采取措施,系统基本不可能达到指标。
4.从公开发表的文献及专利情况,未涉及两轴光电搜索系统方位高速旋转下的俯仰稳定方法。
技术实现要素:
5.(一)发明目的
6.本发明的目的是:提供一种动平台两轴光电搜索系统在方位高速旋转下的俯仰稳定控制方法,解决两轴光电搜索系统方位高速旋转下的俯仰稳定问题,对光电搜索系统由静平台搜索到动平台搜索的功能扩展,提供必要的技术支撑。
7.(二)技术方案
8.为了解决上述技术问题,本发明提供一种动平台两轴光电搜索系统在方位高速旋转下的俯仰稳定控制方法,所述俯仰稳定控制方法由光电搜索系统伺服控制软件来实现,包括以下步骤:
9.步骤1:初始化,锁定光电搜索系统零位;
10.步骤2:俯仰机构惯性空间位置闭环;
11.步骤3:计算俯仰陀螺速率环前馈速度;
12.步骤4:俯仰前馈速度反向加入俯仰陀螺速率环。
13.其中,所述步骤1包括以下子步骤:
14.步骤1.1:俯仰机构锁定光电搜索系统零位;
15.步骤1.2:方位机构锁定光电搜索系统零位。
16.其中,所述步骤2包括以下子步骤:
17.步骤2.1:计算俯仰零位锁定时,光轴与水平面夹角α;
18.步骤2.2:计算俯仰位置环控制指令θ
el_cmd
;
19.步骤2.3:俯仰机构以θ
el_cmd
为输入位置闭环。
20.其中,所述步骤2.1中,
21.α=θ
pitch
cos(-θ
az
) θ
roll
sin(-θ
az
)=θ
pitch
cosθ
az-θ
roll
sinθ
az
,α为光轴锁定零位时光轴指向与水平面夹角,(θ
pich
,θ
roll
)为平台姿态角,θ
az
为光电搜索系统方位角。
22.其中,所述步骤2.2中,
23.θ
el_cmd
=θ
tgt-α,θ
tgt
当前任务需求的光轴与水平面夹角。
24.其中,所述步骤3包括以下子步骤:
25.步骤3.1:计算俯仰旋转轴与水平面夹角β;
26.步骤3.2:计算方位旋转轴速度ω
az
;
27.步骤3.3:俯仰陀螺速率环前馈速度ω
el_fd
计算。
28.其中,所述步骤3.1中,
29.β=θ
pitch
sin(-θ
az
)-θ
roll
cos(-θ
az
)=-θ
pitch
sinθ
az-θ
roll
cosθ
az
。
30.其中,所述步骤3.2中,
31.当陀螺敏感轴与旋转轴平行时,则ω
az
=ω
az_gyro
;
32.当陀螺敏感轴与旋转轴存在夹角θ
gyro
时,则ω
az
=ω
az_gyro
secθ
gyro
;
33.ω
az_gyro
为陀螺测量输出角速率;θ
gyro
是固定值,或者随系统工作动态变化。
34.其中,所述步骤3.3中,ω
el_fd
=-ω
az
tanβ。
35.其中,所述光电搜索系统伺服控制软件运行在主控芯片为dsp的伺服控制板上。
36.(三)有益效果
37.上述技术方案所提供的动平台两轴光电搜索系统在方位高速旋转下的俯仰稳定控制方法,有益效果体现在以下两个方面。
38.(1)解决了两轴光电搜索系统动平台下方位高速旋转下俯仰稳定问题,由于在动平台特点及方位机构旋转,使俯仰旋转轴与俯仰稳定轴不一致,且由于方位旋转轴与俯仰旋转轴正交,俯仰陀螺无法敏感到方位旋转轴在俯仰稳定轴上的扰动,使得俯仰速率环反馈仅能克服俯仰旋转轴上的扰动,无法抑制方位旋转对俯仰稳定轴的扰动。本发明,通过运动学关系,获得了方位旋转对俯仰稳定轴的速率扰动,通过控制俯仰旋转轴,从而在俯仰稳定轴上产生与扰动反向的前馈速率抵消扰动,充分利用了高带宽的速率环上对该扰动进行补偿,弥补了仅依靠位置环抗扰能力不足的问题。
39.(2)实现逻辑简单,只涉及到简单三角函数、四则运算,具有算法简单、可操作性强的优点。
附图说明
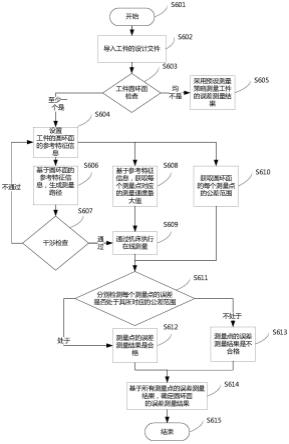
40.图1是本发明控制方法的操作流程图。
41.图2是典型光电搜索系统结构示意图。
42.图3是动平台光电搜索系统轴系关系示意图。
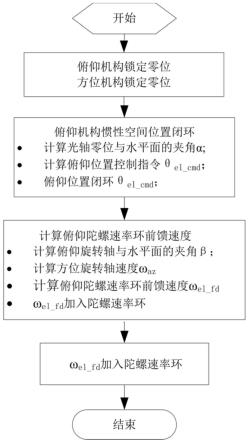
43.图4是本发明动平台两轴光电搜索系统俯仰稳定工作原理图。
44.图5是俯仰零位锁定时,光轴与水平面夹角计算原理图。
45.图6是俯仰旋转轴与水平面夹角计算原理图。
46.图7是俯仰稳定工作运动关系示意图。
具体实施方式
47.为使本发明的目的、内容和优点更加清楚,下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。
48.本发明光电搜索系统一种两轴光电搜索系统方位高速旋转下的俯仰稳定方法的优选实施是由光电搜索系统伺服控制软件来实现,在伺服控制软件运行之前,系统需要确保光电搜索系统光机结构配置完备,相关传感器测试可用,系统数据通信功能测试可用,伺服控制系统的基本回路测试可用,同时具有必要的性能。伺服控制软件运行在主控芯片为dsp的伺服控制板上,该方法实现的前提条件如下:
49.(1)平台惯导可满足系统精度要求,测量输出平台姿态角(θ
pich
,θ
roll
),θ
pich
为纵摇角,θ
roll
为横摇角,平台姿态角定义遵循通常惯导测量定义。纵摇角θ
pich
以水平面为基准,平台零位指向上抬为正,下降为负;横摇角θ
roll
是平台经过纵摇后,以平台零位指向为旋转轴线,左抬高为正,左下沉为负,其中平台零位指向光电搜索系统锁定零位时,光轴指向在平台水平安装面上的投影;
50.(2)方位、俯仰位置传感器满足系统精度要求,输出光电搜索系统方位角、俯仰角(θ
az
,θ
el
);
51.(3)方位俯仰陀螺满足系统精度要求,输出方位、俯仰旋转运动惯性角速率(ω
az_gyro_
,ω
el_gyro
);
52.(4)方位、俯仰位置回路可用,带宽1.5hz;
53.(5)方位、俯仰陀螺速率回路可用,带宽30hz;
54.(6)系统零位标定完成。
55.在上述工作完成基础上,伺服控制软件,将按照图1所示的工作流程执行以下步骤:
56.步骤1:初始化
57.步骤1.1:俯仰机构锁定光电搜索系统零位;
58.步骤1.2:方位机构锁定光电搜索系统零位。
59.步骤2:俯仰机构惯性空间位置闭环
60.步骤2.1:计算俯仰零位锁定时,光轴与水平面夹角α
61.α=θ
pitch
cos(-θ
az
) θ
roll
sin(-θ
az
)=θ
pitch
cosθ
az-θ
roll
sinθ
az
,α为光轴锁定零位时光轴指向与水平面夹角,(θ
pich
,θ
roll
)为平台姿态角,θ
az
为光电搜索系统方位角,计算原理见图4。
62.步骤2.2:计算俯仰位置环控制指令θ
el_cmd
63.θ
el_cmd
=θ
tgt-α,θ
tgt
当前任务需求的光轴与水平面夹角;如图5所示。
64.步骤2.3:俯仰机构以θ
el_cmd
为输入位置闭环。
65.步骤3:计算俯仰陀螺速率环前馈速度ω
el_
fd
66.步骤3.1:计算俯仰旋转轴与水平面夹角β
67.β=θ
pitch
sin(-θ
az
)-θ
roll
cos(-θ
az
)=-θ
pitch
sinθ
az-θ
roll
cosθ
az
,如图6所示。
68.步骤3.2:计算方位旋转轴速度ω
az
69.ω
az
与陀螺的安装方式有关,如果陀螺敏感轴与旋转轴平行,则ω
az
=ω
az_gyro
;ω
az_gyro
为陀螺测量输出角速率,如果陀螺安装方式使得陀螺敏感轴与旋转轴存在某一夹角θ
gyro
,则ω
az
=ω
az_gyro
secθ
gyro
,θ
gyro
可以是固定值,也可以随系统工作动态变化。
70.本实施方案,方位陀螺敏感轴与方位旋转轴夹角θ
gyro
等于光电搜索系统俯仰角θ
el
,ω
az
=ω
az_gyro
secθ
gyro
=ω
az_gyro
secθ
el
。
71.步骤3.3:俯仰陀螺速率环前馈速度ω
el_fd
计算
72.为了使ω
az
对俯仰稳定轴不造成影响,ω
el_fd
需要使等式ω
el_fd
cosβ ω
az
sinβ=0成立(图7),ω
el_fd
=-ω
az
tanβ。
73.步骤4:俯仰前馈速度ω
el_fd
反向加入俯仰陀螺速率环。
74.由上述技术方案可以看出,本发明首先通过惯导和陀螺组合实现对动平台对俯仰旋转轴上的扰动隔离,在此基础上,基于惯导姿态角及光电搜索系统方位角,结合方位旋转速率,获得方位高速旋转在俯仰稳定轴上的扰动速率,经运算将该扰动以前馈的方式反向加入俯仰速率环,从而充分利用俯仰速率环高带宽特性,抵消方位高速旋转对俯仰惯性位置锁定的扰动,使俯仰能够锁定在惯性空间固定角度,使系统具备了动平台下目标稳定搜索能力,本发明工作原理见图3。
75.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。