技术特征:
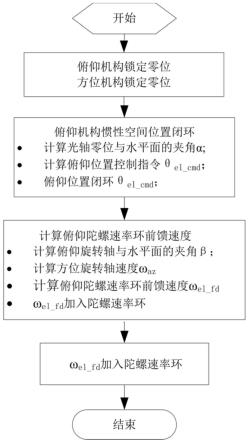
1.一种动平台两轴光电搜索系统在方位高速旋转下的俯仰稳定控制方法,其特征在于,所述俯仰稳定控制方法由光电搜索系统伺服控制软件来实现,包括以下步骤:步骤1:初始化,锁定光电搜索系统零位;步骤2:俯仰机构惯性空间位置闭环;步骤3:计算俯仰陀螺速率环前馈速度;步骤4:俯仰前馈速度反向加入俯仰陀螺速率环。2.如权利要求1所述的动平台两轴光电搜索系统在方位高速旋转下的俯仰稳定控制方法,其特征在于,所述步骤1包括以下子步骤:步骤1.1:俯仰机构锁定光电搜索系统零位;步骤1.2:方位机构锁定光电搜索系统零位。3.如权利要求2所述的动平台两轴光电搜索系统在方位高速旋转下的俯仰稳定控制方法,其特征在于,所述步骤2包括以下子步骤:步骤2.1:计算俯仰零位锁定时,光轴与水平面夹角α;步骤2.2:计算俯仰位置环控制指令θ
el_cmd
;步骤2.3:俯仰机构以θ
el_cmd
为输入位置闭环。4.如权利要求3所述的动平台两轴光电搜索系统在方位高速旋转下的俯仰稳定控制方法,其特征在于,所述步骤2.1中,α=θ
pitch
cos(-θ
az
) θ
roll
sin(-θ
az
)=θ
pitch
cosθ
az-θ
roll
sinθ
az
,α为光轴锁定零位时光轴指向与水平面夹角,(θ
pich
,θ
roll
)为平台姿态角,θ
az
为光电搜索系统方位角。5.如权利要求4所述的动平台两轴光电搜索系统在方位高速旋转下的俯仰稳定控制方法,其特征在于,所述步骤2.2中,θ
el_cmd
=θ
tgt-α,θ
tgt
当前任务需求的光轴与水平面夹角。6.如权利要求5所述的动平台两轴光电搜索系统在方位高速旋转下的俯仰稳定控制方法,其特征在于,所述步骤3包括以下子步骤:步骤3.1:计算俯仰旋转轴与水平面夹角β;步骤3.2:计算方位旋转轴速度ω
az
;步骤3.3:俯仰陀螺速率环前馈速度ω
el_fd
计算。7.如权利要求6所述的动平台两轴光电搜索系统在方位高速旋转下的俯仰稳定控制方法,其特征在于,所述步骤3.1中,β=θ
pitch
sin(-θ
az
)-θ
roll
cos(-θ
az
)=-θ
pitch
sinθ
az-θ
roll
cosθ
az
。8.如权利要求7所述的动平台两轴光电搜索系统在方位高速旋转下的俯仰稳定控制方法,其特征在于,所述步骤3.2中,当陀螺敏感轴与旋转轴平行时,则ω
az
=ω
az_gyro
;当陀螺敏感轴与旋转轴存在夹角θ
gyro
时,则ω
az
=ω
az_gyro
secθ
gyro
;ω
az_gyro
为陀螺测量输出角速率;θ
gyro
是固定值,或者随系统工作动态变化。9.如权利要求8所述的动平台两轴光电搜索系统在方位高速旋转下的俯仰稳定控制方法,其特征在于,所述步骤3.3中,ω
el_fd
=-ω
az
tanβ。10.如权利要求1-9中任一项所述的动平台两轴光电搜索系统在方位高速旋转下的俯仰稳定控制方法,其特征在于,所述光电搜索系统伺服控制软件运行在主控芯片为dsp的伺
服控制板上。
技术总结
本发明公开了一种动平台两轴光电搜索系统在方位高速旋转下的俯仰稳定控制方法,所述俯仰稳定控制方法由光电搜索系统伺服控制软件来实现,包括以下步骤:步骤1:初始化,锁定光电搜索系统零位;步骤2:俯仰机构惯性空间位置闭环;步骤3:计算俯仰陀螺速率环前馈速度;步骤4:俯仰前馈速度反向加入俯仰陀螺速率环。本发明通过运动学关系,获得了方位旋转对俯仰稳定轴的速率扰动,通过控制俯仰旋转轴,从而在俯仰稳定轴上产生与扰动反向的前馈速率抵消扰动,充分利用了高带宽的速率环上对该扰动进行补偿,弥补了仅依靠位置环抗扰能力不足的问题。题。题。
技术研发人员:刘小强 李维杰 宋晓明 王虎 郝利锋 柳井莉 张蕙菁 杨修林 任高辉 孟海江 邢军智
受保护的技术使用者:西安应用光学研究所
技术研发日:2022.04.27
技术公布日:2022/8/5
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。