1.本发明属于行星齿轮箱故障诊断技术领域,特别涉及一种基于模态重构与装袋模型的行星齿轮箱故障诊断方法。
背景技术:
2.近年来,快速发展的人工智能理论为机械装备的智能诊断提供了有力工具,并在行星齿轮箱故障诊断领域取得了一定的成果。有人在应用emd进行轴承故障特征提取的基础上,结合svm良好的分类性能进行模式识别,实现了故障诊断(付大鹏,翟勇,于青民.基于emd和支持向量机的滚动轴承故障诊断研究[j].机床与液压,2017,45(11):184-187);有人使用原始振动信号作为输入,通过组合多层非线性神经网络从中自动提取故障特征进行故障状态识别(赵璐,马野.基于一维卷积神经网络的齿轮箱故障诊断研究[j].测试技术学报,2019,33(4):302-306);有人提出一种基于最小熵反卷积和自适应变分模态分解的齿轮箱故障诊断方法,用于提高传统变分模态分解在行星齿轮箱故障诊断中的泛化能力(朱静,邓艾东,邓敏强,等.基于med和自适应vmd的行星齿轮箱故障诊断方法[j].东南大学学报:自然科学版,2020,50(4):7)。
[0003]
尽管目前针对齿轮、轴承等回转部件进行了有益探索,然而,一方面由于行星齿轮箱复杂的内部结构导致激励信息相互耦合,呈现出明显的非线性,给动态信息的解读和分析带来挑战;另一方面恶劣的服役工况导致行星齿轮箱动态信息受噪声干扰严重,呈现不同的统计特性,对诊断模型的泛化能力要求更高。因此,如何对不同服役工况下蕴含在多干扰模式中的损伤本征信息进行充分发掘是当前亟待解决的问题。
技术实现要素:
[0004]
为了克服上述现有技术的缺点,本发明的目的在于提供了一种基于模态重构与装袋模型的行星齿轮箱故障诊断方法,可以在不同服役工况下实现行星齿轮箱的健康监测。
[0005]
为了达到上述目的,本发明采取的技术方案为:
[0006]
一种基于模态重构与装袋模型的行星齿轮箱故障诊断方法,首先利用三相加速度传感器采集行星齿轮箱x、y、z三个方向振动信号;然后通过变分模态分解(variational mode decomposition,vmd)对振动信号进行处理得到分解后的本征模态分量,以削弱噪声对振动信号的干扰;随后通过各阶本征模态分量的频率方差对其进行重构,并进行能量指标提取;最后,通过bagging tree的集成算法进行模型训练,得到识别行星齿轮箱状态的有效模型。
[0007]
一种基于模态重构与装袋模型的行星齿轮箱故障诊断方法,包括以下步骤:
[0008]
步骤一,利用布置在行星齿轮箱上的三相加速度传感器,采集不同健康状态下的振动信号{x,y,z};
[0009]
步骤二,对采集到的振动信号进行变分模态分解(vmd),得到各个通道的本征模态分量sk(t);
[0010]
sk(t)=ak(t)exp(iφk(t))
ꢀꢀ
(1)
[0011]
其中ak(t)为非负的信号包络,φk(t)为非递减的相位,i为虚数单位;
[0012]
步骤三,根据公式(2)计算各个通道中本征模态分量频率的方差vf,基于频率方差的大小,对前5阶分量进行加权重构,得到重构信号;
[0013][0014]
其中为信号的重心频率,f为频率,p为f对应的幅值;
[0015]
步骤四,根据公式(3)计算各阶重构信号的能量e,利用各阶能量除以能量和得到了每个通道的归一化特征;
[0016][0017]
其中为xi重构信号幅值,n为信号长度;
[0018]
步骤五,基于各个通道的归一化特征值构建结构化特征集,利用bagging tree的集成算法,从结构化特征集样本中有放回的抽取子集,进行决策树分类学习训练,综合多个决策结果得到行星齿轮箱故障诊断模型;
[0019]
步骤六,利用步骤五中得到诊断模型对行星齿轮箱上采集到的振动信号进行测试,从而识别行星齿轮箱的健康状态。
[0020]
所述的步骤二的具体方法:
[0021]
对采集到的振动信号进行变分模态分解(vmd),如公式(4)所示
[0022][0023]
其中x(t)为被分解的振动信号,k为分解层数,{sk}为分解后第k阶本征模态分量,{ωk}为分解后第k阶本征模态分量的中心频率,i为虚数单位,δ(t)为狄拉克函数,*为卷积运算符。
[0024]
所述的步骤三的具体方法:
[0025]
对本征模态分量进行傅里叶变换映射到频域空间,如公式(5)所示,
[0026][0027]
其中sk(t)为本征模态分量,f(n)为对应的频域信号,i为虚数单位;利用采样频率fs将频域信号与实际频率对应,如公式(6)所示,得到信号的频率序列f与对应的频率幅值p;
[0028][0029]
根据公式(2)计算出各个本征模态分量的频率方差vf,基于频率方差的大小,对前
5阶分量进行重构。
[0030]
本发明相比于现有技术,具有以下有益效果:
[0031]
a)本发明以数据信息为驱动,通过变分模态分解(vmd)实现了降噪,同时提出分量频率方差对各阶本征模态进行加权重构以增强故障特征,结果表明本发明不仅有效抑制了随机冲击和强噪声干扰,而且提高了诊断效率和精度。
[0032]
b)与传统仅基于稳定工况下单通道数据对行星齿轮箱进行诊断的方法不同,本发明利用各阶重构信号的能量构建结构化特征集,通过bagging tree集成算法融合各个通道的信号特征,实现了复杂服役工况下行星齿轮箱的健康监测。
附图说明
[0033]
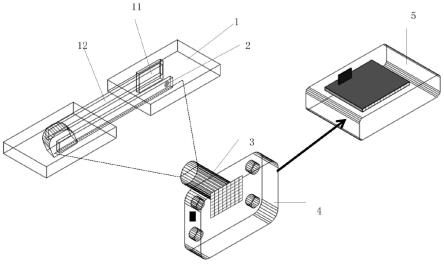
图1为实施例行星齿轮故障诊断实验台示意图。
[0034]
图2为实施例行星齿轮箱内部结构示意图。
[0035]
图3为实施例行星齿轮及其表面加工出点蚀和齿面磨损示意图。
[0036]
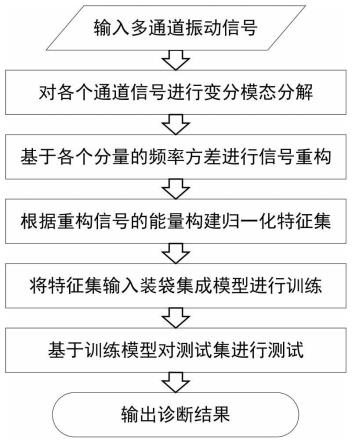
图4为本发明方法的流程图。
[0037]
图5为实施例采集不同转速下行星齿轮箱的振动信号。
[0038]
图6为实施例正常情况下的x、y、z通道5阶分量及余项。
[0039]
图7为实施例齿面点蚀故障下的x、y、z通道5阶分量及余项。
[0040]
图8为实施例齿面磨损故障下的x、y、z通道5阶分量及余项。
[0041]
图9为实施例抽取10%样本做训练集测试结果的混淆矩阵图。
[0042]
图10为实施例在不同转速下的方法测试结果。
[0043]
图11为实施例对变转速信号进行测试的结果。
具体实施方式
[0044]
下面结合附图和实施例对本发明做详细描述。
[0045]
以下将以行星齿轮故障诊断实验台为例进行说明,该实验台由驱动电机、联轴器、行星齿轮箱及磁粉制动器等组成,振动传感器安装在行星齿轮箱上,如图1所示。其中行星齿轮箱内由太阳轮、内齿圈以及三个均布的行星齿轮组成,行星架与输出轴相连,如图2所示。为了模拟齿轮箱早期故障,在行星齿轮表面加工出点蚀和齿面磨损,如图3所示。实验台由驱动电机驱动,将扭矩从输入轴沿行星齿轮箱传递到磁粉制动器,磁粉制动器完成负载。
[0046]
具体参数如下:1)驱动电机额定功率:1.2kw;2)行星齿轮箱传动比:5.1:1,内齿圈齿数:82,模数:1,行星轮齿数:31,模数:1,太阳轮齿数:20,模数:1;3)磁粉制动器额定功率下的扭矩:0.06n*m。
[0047]
如图4所示,一种基于模态重构与装袋模型的行星齿轮箱健康监测方法,包括以下步骤:
[0048]
步骤一,利用ni2板卡,通过三相加速度传感器采集不同转速下(包括1200rpm、1800rpm、2400rpm)行星齿轮箱的振动信号{x,y,z},采样频率为5000hz,如图5所示;
[0049]
步骤二,将采集到的振动信号进行截取,截取时间为2s,并根据行星齿的状态(正常、点蚀、齿面磨损)对振动信号进行标记;
[0050]
如图6-图8所示,将各个通道中所截取的振动信号进行变分模态分解,得到各个通
道的本征模态分量sk(t),完成了振动信号的预处理工作;
[0051]
sk(t)=ak(t)exp(iφk(t))
ꢀꢀ
(1)
[0052]
其中ak(t)为非负的信号包络,φk(t)为非递减的相位,i为虚数单位;
[0053]
本实施例对采集到的振动信号进行变分模态分解(vmd),如公式(4)所示
[0054][0055]
其中x(t)为被分解的振动信号,k为分解层数,{sk}为分解后第k阶本征模态分量,{ωk}为分解后第k阶本征模态分量的中心频率,i为虚数单位,δ(t)为狄拉克函数,*为卷积运算符;
[0056]
步骤三,根据公式(2)计算各个通道中本征模态分量频率的方差vf,基于频率方差的大小,对前5阶分量进行加权重构,得到重构信号,将重构后能量指标作为该通道的特征向量;
[0057][0058]
其中为信号的重心频率,f为频率,p为f对应的幅值;
[0059]
本实施例对本征模态分量进行傅里叶变换映射到频域空间,如公式(5)所示,
[0060][0061]
其中sk(t)为本征模态分量,f(n)为频域信号,i为虚数单位;利用采样频率fs将频域信号与实际频率对应,如公式(6)所示,得到信号的频率序列f与对应的频率幅值p;
[0062][0063]
根据公式(2)计算出各个本征模态分量的频率方差vf,基于频率方差的大小,对前5阶分量进行重构,得到重构信号;
[0064]
步骤四,根据公式(3)计算各阶重构信号的能量e,利用各阶能量除以能量和得到了每个通道的归一化特征;
[0065][0066]
其中为xi重构信号幅值,n为信号长度;
[0067]
步骤五,基于各个通道的归一化特征值构建结构化特征集,利用bagging tree的集成算法,从结构化特征集样本中有放回的抽取子集,进行决策树分类学习训练,综合多个决策结果得到行星齿轮箱故障诊断模型;
[0068]
本实施例抽取各个状态下10%的数据为训练集,剩下90%作为测试集,利用bagging tree的集成算法进行训练,并按照“分解本征模态分量方式-重构信号依据的指
标-特征指标”的命名方式区分各方法,例如:“vmd-vf-e”表示“利用变分模态分解(vmd)-基于频率方差(vf)重构信号-提取能量(e)归一化特征”,测试结果如图9所示,可以看见实施例方法准确地区分了测试数据的正常状态与故障状态,而且总体准确率也达到98.37%,较好的实现了行星齿轮箱的故障诊断;
[0069]
步骤六,利用步骤五中得到诊断模型对行星齿轮箱上采集到的振动信号进行测试,从而识别行星齿轮箱的健康状态。
[0070]
为验证本实施例对在不同工况下的泛化能力,分别在转速为1200rpm、1800rpm、2400rpm以及变转速工况下进行测试,随机提取10%的样本作为训练集,结果如图10所示,结果表明在不同工况下,方法仍保持较高准确率。
[0071]
为验证本实施例在复杂服役工况下的泛化能力,对混合工况下的信号进行测试,结果如图11所示,从图中可以看到在较少训练样本时实施例方法准确率较高,且随着训练集样本数量增加,准确率稳定在98%以上。因此,本实施例能够有效的对不同转速工作状态下的行星齿轮箱进行早期故障诊断。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。