1.本发明涉及一种辅助装置,尤其涉及一种烧伤科绷带缠绕辅助装置。
背景技术:
2.烧伤是指被热液、蒸汽、高温气体等引起的组织损害的总称,在治疗烧死时,通常需要使用到大量的绷带对患者的烧伤处进行缠绕包裹,从而防止烧死处被感染,并且缠绕绷带有助于烧伤处的伤口恢复,而现今部分医院会使用绷带缠绕辅助装置给患者的烧伤处缠绕绷带。
3.根据专利授权公开号为cn211863136u的一种烧伤整形用绷带缠绕辅助装置,包括外壳体和绷带本体,所述外壳体的内部开设有收纳槽,所述绷带本体位于收纳槽的内部,且收纳槽的外侧开设有侧通槽,所述侧通槽的内侧活动连接有塑胶盖板,且塑胶盖板的侧端一体化设置有连接活动杆,所述侧通槽的侧端开设有内插槽,且内插槽的侧边开设有连接活动槽,并且连接活动槽的外端一体化设置有凸出端,所述外壳体的外侧一体化设置有引导固定架,且引导固定架的外侧安装有活动刀架,所述外壳体的侧端连接有活动端盖。该烧伤整形用绷带缠绕辅助装置,可通过塑胶盖板配合收纳槽对绷带本体进行活动收纳,同时方便绷带的灵活裁切使用。
4.上述装置虽然可以通过进一步压动塑胶盖板对绷带本体进行裁切,从而达到切断绷带的效果,以此医护人员即可不用频繁使用剪刀对绷带进行裁切,但是上述装置在将绷带缠绕在患者烧伤处时,需要医护人员手动使用上述装置将绷带缠绕在患者烧伤处,不具备自动缠绕绷带的功能,使得缠绕效率低下,并且会耗费人力。
5.为了解决上述现有技术中存在的问题,我们很有必要设计一种烧伤科绷带缠绕辅助装置,从而达到能够自动缠绕绷带的效果。
技术实现要素:
6.为了克服目前的绷带缠绕辅助装置无法自动将绷带缠绕在患者烧死处的缺点,要解决的技术问题为:提供一种能够自动缠绕绷带的烧伤科绷带缠绕辅助装置。
7.本发明的技术方案为:一种烧伤科绷带缠绕辅助装置,包括有固定框、传送轮、连接块、转动环、电机、第一齿轮、齿环、放料机构和切割机构,固定框的内部转动式连接有传送轮,传送轮的顶部均匀间隔地连接有四个连接块,四个连接块的顶部之间连接有转动环,传送轮中部的前侧安装有电机,电机位于固定框内部,电机的输出轴上连接有第一齿轮,固定框内壁的下侧连接有齿环,齿环与第一齿轮啮合,转动环顶部的前侧设有放料机构,放料机构上设有切割机构。
8.在其中一个实施例中,放料机构包括有固定块、放料框、遮尘板、扭力弹簧和定位杆,转动环顶部的前侧连接有固定块,固定块的顶部连接有放料框,放料框的后侧开有出料口,放料框的内底部连接有定位杆,放料框的顶部转动式连接有遮尘板,遮尘板的前侧与放料框之间连接有两个扭力弹簧,两个扭力弹簧均套在遮尘板的前侧上。
9.在其中一个实施例中,切割机构包括有第一固定杆、推动板、触碰块、滑杆、第一弹簧和切割刀,固定块的左右两侧均连接有第一固定杆,两个第一固定杆左右对称,两个第一固定杆的顶部之间滑动式连接有推动板,放料框位于推动板的内侧,推动板的前侧连接有触碰块,放料框外壁的左右两后侧均连接有滑杆,两个滑杆上均滑动式连接有切割刀,两个切割刀左右对称,两个切割刀均位于放料框的后侧,推动板的后侧均与两个切割刀接触配合,两个切割刀与相邻的滑杆之间均连接有第一弹簧,两个第一弹簧分别套在两个滑杆上。
10.在其中一个实施例中,还包括有升降机构,升降机构包括有第一齿条、固定板、滑槽块、推动块、滑槽板、第二弹簧、第二固定杆、转轴、第二齿轮、锥齿轮、单向齿轮、第二齿条和接触块,固定块底部的后侧连接有第一齿条,固定框的后壁连接有滑槽块,滑槽块上滑动式连接有滑槽板,滑槽板后壁的右下侧开有卡槽,滑槽块的后端连接有推动块,推动块的后侧通过导杆滑动式连接有固定板,固定板与推动块的底部之间连接有第二弹簧,第二弹簧套在导杆上,滑槽板前壁中部的左右两侧均连接有接触块,两个接触块左右对称,滑槽块的底部前侧连接有第二固定杆,第二固定杆的下部转动式贯穿有转轴,滑槽块的底部也转动式连接有转轴,上侧转轴位于第二固定杆的后侧,转轴共有两个,上侧转轴的下部连接有第二齿轮,上侧转轴的底部和下侧转轴的前侧均连接有锥齿轮,锥齿轮共有两个,两个锥齿轮啮合,下侧转轴的后侧连接有单向齿轮,滑槽板的前右侧滑动式连接有第二齿条,第二齿条与单向齿轮啮合,第二齿条位于两个接触块之间。
11.在其中一个实施例中,还包括有放松机构,放松机构包括有滑动杆、移动板、滑轨杆、第三弹簧、推移块、拉动块和第四弹簧,第二齿条右壁的上下两侧均连接有滑动杆,两个滑动杆上下对称,两个滑动杆均滑动式贯穿滑槽板,滑槽板后壁的右侧中部连接有滑轨杆,滑轨杆上滑动式连接有移动板,移动板的右壁下侧与下侧滑动杆的后侧相连接,移动板与滑轨杆之间连接有第三弹簧,第三弹簧套在滑轨杆上,移动板的右壁下侧连接有推移块,推移块位于下侧滑动杆的上方,推移块的右侧内部滑动式连接有拉动块,拉动块移动后能够与卡槽相卡接,拉动块与推移块之间连接有第四弹簧,第四弹簧套在拉动块上。
12.在其中一个实施例中,还包括有放置机构,放置机构包括有底板、放置框、收纳盒和拉动杆,滑槽板的底部和固定板的底部之间连接有底板,底板的后侧连接有放置框,放置框的内部滑动式连接有收纳盒,收纳盒贯穿放置框的后壁,收纳盒左右两壁的前侧均连接有拉动杆,两个拉动杆左右对称,两个拉动杆均与放置框的内壁接触配合。
13.在其中一个实施例中,还包括有定位机构,定位机构包括有支撑架、连接架和把手,滑槽板的底部设有连接架,底板顶部的前侧连接有支撑架,支撑架与连接架的顶部前侧相连接,支撑架的顶部连接有两个把手,两个把手呈前后对称式设置。
14.在其中一个实施例中,收纳盒的后壁设有握把。
15.本发明具备以下有益效果:1、通过以电机为驱动力,能够使转动环逆时针旋转,随之转动环通过固定块和放料框以及定位杆带动绷带逆时针旋转,从而在绷带逆时针旋转的过程中,绷带会持续且自动的缠绕在患者手臂上,以此可自动将绷带缠绕在患者手臂上,有效的提高了工作效率,且减少了人力耗费。
16.2、通过让患者将烧伤的手臂从上至下穿过固定框,之后让患者用烧伤的手臂上的手握住把手,以此在进行绷带缠绕时,患者的手臂不易晃动,使绷带缠绕操作能够正常的进行。
17.3、通过握把将收纳盒向后拉动,收纳盒随之带动拉动杆向后移动,当拉动杆向后移动与收纳盒内壁的后侧接触后,停止拉动收纳盒,这时将绷带或是医疗工具从收纳盒内取出即可,以此医护人员可随时使用绷带或是医疗工具,给医护人员带来了便利。
附图说明
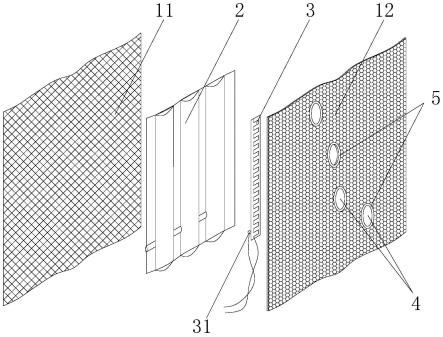
18.图1为本发明的立体结构示意图。
19.图2为本发明的部分剖视图。
20.图3为本发明的a处放大图。
21.图4为本发明的放料机构立体结构示意图。
22.图5为本发明的切割机构部分立体结构示意图。
23.图6为本发明的升降机构部分剖视图。
24.图7为本发明的b处放大图。
25.图8为本发明的放松机构部分剖视图。
26.图9为本发明的定位机构立体结构示意图。
27.图10为本发明的放置机构立体结构示意图。
28.图11为本发明放置机构的剖面视图。
29.图中标记为:1-固定框,2-传送轮,3-连接块,4-转动环,5-电机,6-第一齿轮,7-齿环,8-放料机构,81-固定块,82-放料框,83-遮尘板,84-扭力弹簧,85-定位杆,9-切割机构,91-第一固定杆,92-推动板,93-触碰块,94-滑杆,95-第一弹簧,96-切割刀,10-升降机构,101-第一齿条,102-固定板,103-滑槽块,104-推动块,105-滑槽板,106-第二弹簧,107-第二固定杆,108-转轴,109-第二齿轮,1091-锥齿轮,1092-单向齿轮,1093-第二齿条,1094-接触块,11-放松机构,111-滑动杆,112-移动板,113-滑轨杆,114-第三弹簧,115-推移块,116-拉动块,117-第四弹簧,12-定位机构,121-支撑架,122-连接架,123-把手,13-放置机构,131-底板,132-放置框,133-收纳盒,134-拉动杆。
具体实施方式
30.下面结合附图所示的实施例对本发明作进一步描述。
31.具体实施方式1一种烧伤科绷带缠绕辅助装置,请查看图1-5,包括有固定框1、传送轮2、连接块3、转动环4、电机5、第一齿轮6、齿环7、放料机构8和切割机构9,固定框1的内部转动式连接有传送轮2,传送轮2的顶部均匀间隔地通过焊接连接有四个连接块3,四个连接块3的顶部之间通过焊接连接有转动环4,传送轮2中部的前侧安装有电机5,电机5位于固定框1内部,电机5的输出轴上连接有第一齿轮6,固定框1内壁的下侧连接有齿环7,齿环7与第一齿轮6啮合,转动环4顶部的前侧设有放料机构8,放料机构8上设有切割机构9。
32.请查看图1和图4,放料机构8包括有固定块81、放料框82、遮尘板83、扭力弹簧84和定位杆85,转动环4顶部的前侧连接有固定块81,固定块81的顶部连接有放料框82,放料框82的后侧开有出料口,放料框82的内底部通过焊接连接有定位杆85,放料框82的顶部转动式连接有遮尘板83,遮尘板83的前侧与放料框82之间连接有两个扭力弹簧84,两个扭力弹簧84均套在遮尘板83的前侧上。
33.请查看图1和图5,切割机构9包括有第一固定杆91、推动板92、触碰块93、滑杆94、第一弹簧95和切割刀96,固定块81的左右两侧均通过焊接连接有第一固定杆91,两个第一固定杆91左右对称,两个第一固定杆91的顶部之间滑动式连接有推动板92,放料框82位于推动板92的内侧,推动板92的前侧通过焊接连接有触碰块93,放料框82外壁的左右两后侧均通过焊接连接有滑杆94,两个滑杆94上均滑动式连接有切割刀96,两个切割刀96左右对称,两个切割刀96均位于放料框82的后侧,推动板92的后侧均与两个切割刀96接触配合,两个切割刀96与相邻的滑杆94之间均连接有第一弹簧95,两个第一弹簧95分别套在两个滑杆94上。
34.当需要对烧伤的手臂缠绕绷带时,首先医护人员将本装置拿起,将遮尘板83向上转动打开,扭力弹簧84进行形变,其后再将绷带放入放料框82内,使绷带插在定位杆85上,再将绷带的开口通过出料口穿出,然后松开遮尘板83,扭力弹簧84进行复位并带动遮尘板83向下转动复位,然后再让患者将烧伤的手臂从上至下穿过固定框1,其后将穿出绷带向靠近患者手臂的方向拉扯,再将绷带在患者手臂上顺时针绕一圈,其后启动电机5,电机5的输出轴带动第一齿轮6旋转,在第一齿轮6与齿环7啮合的作用下,使得第一齿轮6和电机5带动传送轮2和连接块3以及转动环4向后逆时针旋转,随之转动环4通过固定块81和放料框82以及定位杆85带动遮尘板83和扭力弹簧84以及放料框82内的绷带逆时针旋转,固定块81和放料框82随之带动通过第一固定杆91和滑杆94以及推动板92,带动触碰块93和第一弹簧95以及切割刀96一起逆时针旋转,紧接着在绷带逆时针旋转的过程中,绷带会持续缠绕在患者手臂上,然后每当绷带在患者手臂上缠绕一圈后,医护人员再将本装置向下移动一段距离,从而在绷带持续逆时针旋转的作用下,逆时针旋转的绷带会缠绕在患者手臂未缠绕的地方,以此重复上述操作即可对患者烧伤的手臂缠绕绷带,当绷带缠绕完成后,关闭电机5,并将推动板92向靠近两个切割刀96的方向推动,推动板92随之将两个切割刀96向相互靠近的方向推动,第一弹簧95进行压缩,从而两个切割刀96会将绷带切断,然后再松开推动板92,第一弹簧95进行复位并带动两个切割刀96向相互远离的方向移动复位,两个切割刀96随之将推动板92向远离两个切割刀96的方向推动复位,最后患者再将手臂向上从固定框1内抽出,并让医护人员将缠绕在患者手臂上的绷带打好结,以此即可对患者的手臂缠绕绷带。
35.具体实施方式2在具体实施方式1的基础之上,请查看图1、图6和图7,还包括有升降机构10,升降机构10包括有第一齿条101、固定板102、滑槽块103、推动块104、滑槽板105、第二弹簧106、第二固定杆107、转轴108、第二齿轮109、锥齿轮1091、单向齿轮1092、第二齿条1093和接触块1094,固定块81底部的后侧连接有第一齿条101,固定框1的后壁通过焊接连接有滑槽块103,滑槽块103上滑动式连接有滑槽板105,滑槽板105后壁的右下侧开有卡槽,滑槽块103的后端通过焊接连接有推动块104,推动块104的后侧通过导杆滑动式连接有固定板102,固定板102与推动块104的底部之间连接有第二弹簧106,第二弹簧106套在导杆上,滑槽板105前壁中部的左右两侧均连接有接触块1094,两个接触块1094左右对称,滑槽块103的底部前侧连接有第二固定杆107,第二固定杆107的下部转动式贯穿有转轴108,滑槽块103的底部也转动式连接有转轴108,上侧转轴108位于第二固定杆107的后侧,转轴108共有两个,上侧转轴108的下部连接有第二齿轮109,上侧转轴108的底部和下侧转轴108的前侧均连接有锥齿轮1091,锥齿轮1091共有两个,两个锥齿轮1091啮合,下侧转轴108的后侧连接有单向齿
轮1092,滑槽板105的前右侧滑动式连接有第二齿条1093,第二齿条1093与单向齿轮1092啮合,第二齿条1093位于两个接触块1094之间。
36.请查看图1和图8,还包括有放松机构11,放松机构11包括有滑动杆111、移动板112、滑轨杆113、第三弹簧114、推移块115、拉动块116和第四弹簧117,第二齿条1093右壁的上下两侧均通过焊接连接有滑动杆111,两个滑动杆111上下对称,两个滑动杆111均滑动式贯穿滑槽板105,滑槽板105后壁的右侧中部通过焊接连接有滑轨杆113,滑轨杆113上滑动式连接有移动板112,移动板112的右壁下侧与下侧滑动杆111的后侧相连接,移动板112与滑轨杆113之间连接有第三弹簧114,第三弹簧114套在滑轨杆113上,移动板112的右壁下侧通过焊接连接有推移块115,推移块115位于下侧滑动杆111的上方,推移块115的右侧内部滑动式连接有拉动块116,拉动块116移动后能够与卡槽相卡接,拉动块116与推移块115之间连接有第四弹簧117,第四弹簧117套在拉动块116上。
37.请查看图1和图9,还包括有定位机构12,定位机构12包括有支撑架121、连接架122和把手123,滑槽板105的底部通过焊接连接有连接架122,底板131顶部的通过焊接前侧连接有支撑架121,支撑架121与连接架122的顶部前侧相连接,支撑架121的顶部通过焊接连接有两个把手123,两个把手123呈前后对称式设置,通过使用者用被烧伤的手臂上的手握住把手123,从而能够使患者的手臂不易晃动,便于后续的绷带缠绕工作。
38.起初,第四弹簧117处于拉伸状态,当需要对烧伤的手臂缠绕绷带时,首先医护人员将本装置放在桌子上,再将遮尘板83向上转动打开,扭力弹簧84进行形变,其后再将绷带放入放料框82内,使绷带插在定位杆85上,再将绷带的开口通过出料口穿出,然后松开遮尘板83,扭力弹簧84进行复位并带动遮尘板83向下转动复位,然后再让患者将烧伤的手臂从上至下穿过固定框1,其后将穿出绷带向靠近患者手臂的方向拉扯,再将绷带在患者手臂上顺时针绕一圈,其后启动电机5,电机5的输出轴带动第一齿轮6旋转,在第一齿轮6与齿环7啮合的作用下,使得第一齿轮6和电机5带动传送轮2和连接块3以及转动环4向后逆时针旋转,随之转动环4通过固定块81和放料框82以及定位杆85带动遮尘板83和扭力弹簧84以及放料框82内的绷带逆时针旋转,固定块81同时带动第一齿条101逆时针旋转,固定块81和放料框82随之带动通过第一固定杆91和滑杆94以及推动板92带动触碰块93和第一弹簧95以及切割刀96一起逆时针旋转,紧接着在绷带逆时针旋转的过程中,绷带会持续缠绕在患者手臂上,然后在第一齿条101逆时针旋转的过程中会与第二齿轮109啮合,从而在第一齿条101与第二齿轮109啮合的作用下,第一齿条101会通过第二齿轮109带动上侧转轴108旋转,从而在两个锥齿轮1091啮合的作用下,两个锥齿轮1091会通过下侧转轴108带动单向齿轮1092旋转,从而在单向齿轮1092与第二齿条1093啮合的作用下,第二齿条1093会通过单向齿轮1092和下侧转轴108以及第二固定杆107带动两个锥齿轮1091和上侧转轴108以及第二齿轮109向下移动,滑槽块103随之带动推动块104和固定框1向下移动,第二弹簧106进行压缩,其后固定框1通过传送轮2和连接块3以及转动环4带动电机5和第一齿轮6以及齿环7向下移动,随后转动环4通过固定块81和放料框82以及定位杆85带动遮尘板83和扭力弹簧84以及放料框82内的绷带向下移动,固定块81同时带动第一齿条101向下移动,固定块81和放料框82随之带动通过第一固定杆91和滑杆94以及推动板92带动触碰块93和第一弹簧95以及切割刀96一起向下移动,紧接着在绷带持续逆时针旋转的作用下,逆时针旋转的绷带会向下缠绕在患者手臂未缠绕的地方,与此同时在第一齿条101逆时针旋转的过程中会与第
二齿轮109脱离啮合,从而绷带不再向下移动,与此同时在单向齿轮1092为单向的作用下,这时单向齿轮1092会保持在当前位置,第二弹簧106无法进行复位,其后在第一齿条101逆时针旋转的过程中,第一齿条101会再次与第二齿轮109啮合,从而绷带会再次向下移动,进而绷带会继续缠绕在患者手臂未缠绕的位置,其后当触碰块93向下移动至与接触块1094同一平面后,在触碰块93逆时针旋转的过程中会与右侧接触块1094接触,从而右侧接触块1094会通过触碰块93将推动板92向靠近两个切割刀96的方向推动,推动板92随之将两个切割刀96向相互靠近的方向推动,第一弹簧95进行压缩,从而两个切割刀96会将绷带切断,然后在触碰块93逆时针旋转的过程中会与右侧接触块1094脱离接触,从而第一弹簧95进行复位并带动两个切割刀96向相互远离的方向移动复位,两个切割刀96随之将推动板92向远离两个切割刀96的方向推动复位,紧接着触碰块93逆时针旋转会与左侧接触块1094接触,从而左侧接触块1094会通过触碰块93将推动板92向靠近两个切割刀96的方向推动,推动板92随之将两个切割刀96向相互靠近的方向推动,第一弹簧95进行压缩,从而两个切割刀96会再次对绷带进行切断,从而确保绷带能够完全被切断,然后在触碰块93逆时针旋转的过程中会与左侧接触块1094脱离接触,从而第一弹簧95进行复位并带动两个切割刀96向相互远离的方向移动复位,两个切割刀96随之将推动板92向远离两个切割刀96的方向推动复位,紧接着在推动块104持续向下移动的过程中会与推移块115接触,使得移动板112向右挤压,第三弹簧114进行压缩,移动板112随之通过滑动杆111带动第二齿条1093向右移动,从而第二齿条1093会与单向齿轮1092脱离啮合,与此同时移动板112向右移动后会通过推移块115带动拉动块116和第四弹簧117向右移动,随之拉动块116的前端会对准滑槽板105上的卡槽,从而滑槽板105不再挤压拉动块116,第四弹簧117随之进行复位并带动拉动块116向前移动复位,进而拉动块116会与卡槽卡接配合,使第二齿条1093被拉动块116卡住,这时患者的手臂以及被足够多的绷带缠绕好了,紧接着关闭电机5,与此同时第二齿条1093和单向齿轮1092脱离啮合后,第二弹簧106进行复位并通过推动块104和滑槽块103带动第二固定杆107和上下两侧的转轴108向上移动,第二固定杆107和上下两侧的转轴108随之会带动两个锥齿轮1091和第二齿轮109以及单向齿轮1092向上移动复位,紧接着滑槽块103会带动固定框1向上移动复位,其后固定框1通过传送轮2和连接块3以及转动环4带动电机5和第一齿轮6以及齿环7向上移动复位,随后转动环4通过固定块81和放料框82以及定位杆85带动遮尘板83和扭力弹簧84以及放料框82内的绷带向上移动复位,固定块81同时带动第一齿条101向上移动复位,固定块81和放料框82随之带动通过第一固定杆91和滑杆94以及推动板92带动触碰块93和第一弹簧95以及切割刀96一起向上移动复位,当固定框1向上移动完全复位后,医护人员再将拉动块116向后推动,第四弹簧117进行拉伸,其后拉动块116与卡槽脱离卡接配合,从而拉动块116再次与滑槽板105的后壁接触,然后第三弹簧114进行复位并通过移动板112和滑动杆111带动第二齿条1093向左移动复位,同时移动板112会通过推移块115带动拉动块116和第四弹簧117向左移动复位,这时松开拉动块116即可,从而拉动块116会向左移动复位,最后患者再将手臂向上从固定框1内抽出,并让医护人员将缠绕在患者手臂上的绷带打好结,以此即可自动向下移动绷带对患者的手臂缠绕绷带,减少了人力的耗费。
39.具体实施方式3在具体实施方式2的基础之上,请查看图1、图10和图11,还包括有放置机构13,放置机构13包括有底板131、放置框132、收纳盒133和拉动杆134,滑槽板105的底部和固定板
102的底部之间连接有底板131,底板131的后侧通过焊接连接有放置框132,放置框132的内部滑动式连接有收纳盒133,收纳盒133贯穿放置框132的后壁,收纳盒133的后壁设有握把,便于工作人员将收纳盒133向后拉动,使收纳盒133打开,收纳盒133左右两壁的前侧均通过焊接连接有拉动杆134,两个拉动杆134左右对称,两个拉动杆134均与放置框132的内壁接触配合。
40.当需要对烧伤的手臂缠绕绷带时,首先医护人员将本装置放在桌子上,再让患者将烧伤的手臂从上至下穿过固定框1,之后让患者用烧伤的手臂上的手握住把手123,再进行后续的绷带缠绕即可,以此在进行绷带缠绕时,患者的手臂不易晃动,使绷带缠绕操作能够正常的进行,当绷带缠绕完后,松开把手123,再将手臂向上从固定框1内抽出即可,其后当医护人员需要存放绷带或是医疗工具时,通过握把将收纳盒133向后拉动,收纳盒133随之带动拉动杆134向后移动,其后在拉动杆134向后移动的过程中会与收纳盒133内壁的后侧接触,从而将收纳盒133卡住,这时再往收纳盒133内存放绷带或是医疗工具即可,存放完后,再将收纳盒133向前推动复位,收纳盒133随之带动拉动杆134向前移动复位,需要取出绷带或是医疗工具时,通过握把将收纳盒133向后拉动,收纳盒133随之带动拉动杆134向后移动,其后在拉动杆134向后移动的过程中会与收纳盒133内壁的后侧接触,从而将收纳盒133卡住,这时将绷带或是医疗工具从收纳盒133内取出即可,最后再将收纳盒133向前推动复位,收纳盒133随之带动拉动杆134向前移动复位,以此方便了医护人员随时存储或是使用绷带和医疗工具,给医护人员带来了便利。
41.上面结合附图对本发明的实施方式作了详细说明,但是本发明并不限于上述实施方式,在本领域技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下做出各种变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。