基于retinex图像增强和ostu阈值分割的隔离带检测方法及系统
技术领域
1.本发明涉及室内复杂环境下巡检机器人识别算法优化技术领域,尤其涉及基于retinex图像增强和ostu阈值分割的隔离带检测方法及系统。
背景技术:
2.在室内复杂环境下,通过安装在巡检机器人上的高清摄像头来实时采集设备图像,然后对其进行分析,从而做出预警或提示。通常,在一些危险或重要区域设置隔离带,当机器人例行巡检任务时,可以通过检测隔离带的存在来判断是否需要进行减速或其他操作,以避免巡检机器人误入此类区域,此时隔离带的检测起到了重要作用。目前,已有多种隔离带检测技术应用于巡检机器人上,且算法在不断更新,但是仍存在精度低、实时性差等弱点。
3.因此,需要寻找一种利用图像识别技术自动检测隔离带的存在的方法,若发现巡检机器人靠近隔离带区域时,能够及时做出反馈,减少人力物力的浪费,提升巡检过程的自动化。
技术实现要素:
4.为解决现有技术所存在的技术问题,本发明提供基于retinex图像增强和ostu阈值分割的隔离带检测方法及系统,通过采用改进的遗传算法来寻找ostu的最优阈值,从而提高了算法的效率,实现了信息的及时反馈,提升巡检过程的自动化。
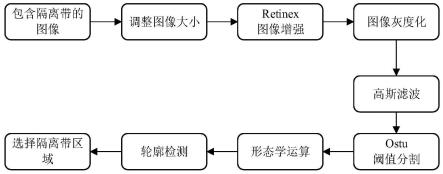
5.本发明方法采用以下技术方案来实现:基于retinex图像增强和ostu阈值分割的隔离带检测方法,包括以下步骤:
6.s1、利用巡检机器人采集带有隔离带的图片,并调整所采集图像的大小;
7.s2、利用retinex算法增强低照度图像光照,改进图像质量;
8.s3、对图像进行灰度化后,采用高斯平滑滤波器平滑图像除去噪声;
9.s4、利用基于改进遗传算法的ostu技术进行阈值分割,区分隔离带目标区域和背景区域,获得初步的二值化图像;
10.s5、利用形状学运算,通过腐蚀、膨胀来完善图像;
11.s6、进行轮廓检测,并通过调整轮廓高和宽以及检测位置确定隔离带的具体区域。
12.本发明系统采用以下技术方案来实现:基于retinex图像增强和ostu阈值分割的隔离带检测系统,包括:
13.隔离带图片采集模块:通过巡检机器人采集带有隔离带的图片,并调整所采集图像的大小;
14.图像增强模块:通过retinex算法增强低照度图像光照,改进图像质量;
15.图像灰度模块:用于对图像进行灰度化处理;
16.高斯滤波模块:通过采用高斯平滑滤波器平滑图像除去噪声;
17.阈值分割模块:通过基于改进遗传算法的ostu技术进行阈值分割,区分隔离带目标区域和背景区域,获得初步的二值化图像;
18.形态学运算模块:通过形状学运算,腐蚀、膨胀完善图像;
19.轮廓检测模块:用于进行检测轮廓;
20.隔离带区域选择模块:通过调整轮廓高和宽以及检测位置确定隔离带的具体区域。
21.本发明与现有技术相比,具有如下优点和有益效果:
22.1、本发明采用retinex图像增强技术,通过抑制光照图像对反射图像的影响来达到增强图像的目的,可避免光线对隔离带检测的影响。
23.2、本发明通过采用改进的遗传算法来寻找ostu的最优阈值,从而提高了算法的效率,实现了信息的及时反馈,提升巡检过程的自动化。
附图说明
24.图1是本发明的方法流程图;
25.图2是本发明灰度化结果示意图;
26.图3是本发明高斯滤波结果示意图;
27.图4是本发明阈值分割结果示意图;
28.图5是本发明腐蚀操作结果示意图;
29.图6是本发明膨胀操作结果示意图;
30.图7是本发明轮廓检测结果示意图。
具体实施方式
31.下面结合实施例及附图对本发明作进一步详细的描述,但本发明的实施方式不限于此。
32.实施例
33.如图1所示,本实施例基于retinex图像增强和ostu阈值分割的隔离带检测方法,包括以下步骤:
34.s1、利用巡检机器人采集带有隔离带的图片,并调整所采集图像的大小;
35.s2、利用retinex算法增强低照度图像光照,改进图像质量;
36.s3、对图像进行灰度化后,采用高斯平滑滤波器平滑图像除去噪声;
37.s4、利用基于改进遗传算法的ostu技术进行阈值分割,区分隔离带目标区域和背景区域,获得初步的二值化图像;
38.s5、利用形状学运算,通过腐蚀、膨胀来完善图像;
39.s6、进行轮廓检测,并通过调整轮廓高和宽以及检测位置确定隔离带的具体区域。
40.本实施例中,retinex算法增强低照度图像光照的具体过程为:
41.从原始图像i中估计出光照分量l,并去除光照分量l,得到反射分量r,从而消除光照不均的影响,以改善图像的视觉效果;三者满足以下数学表达式为:
42.i(x,y)=l(x,y)
×
r(x,y)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(1)
43.其中,i(x,y)为观察者或相机获得的原始图像,l(x,y)为环境中的光照分量,r(x,
y)为物体表面的反射分量;
44.将公式(1)两边取对数,即:
45.log[r(x,y)]=log[i(x,y)]-log[l(x,y)]
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0046]
本实施例中,retinex算法的具体步骤如下:
[0047]
s21、输入原始待增强的图像i(x,y);
[0048]
s22、计算原始图像按指定尺度进行模糊后的图像l(x,y);
[0049]
s23、获取物体表面的反射分量的对数log[r(x,y)];
[0050]
s24、对log[r(x,y)]取反对数后,作为最终的输出。
[0051]
本实施例中,步骤s3中高斯滤波函数的表达式如下:
[0052][0053]
其中,g(x,y)为像素点(x,y)灰度值,(x,y)为像素点坐标,x,y为像素点到中心点的距离,σ为控制滤波程度参数;
[0054]
高斯滤波后的图像为:
[0055]
f(x,y)=g(x,y)f(x,y)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(4)
[0056]
其中,f(x,y)为原始图像,f(x,y)为去噪后的图像。
[0057]
本实施例中,步骤s4的具体实现过程如下:
[0058]
s41、将图像的灰度值编码为二进制,每个二进制为一个个体,以此表示分割阈值;
[0059]
s42、生成初始群体,设定初始种群数量与最大迭代次数;
[0060]
s43、将每个二进制个体解码为实际的灰度值;
[0061]
s44、选取适应度函数,并以此评估种群中个体的适应度;
[0062]
s45、对种群中的个体进行交叉操作;
[0063]
s46、对种群中的个体进行变异操作;
[0064]
s47、当达到最大迭代次数或个体适应度达到设定的标准时,算法终止,具有最大适应度值的个体为最优分割阈值;
[0065]
s48、以返回的最佳阈值对图像进行二值化分割。
[0066]
具体地,对于图像i(x,y),前景和背景的分割阈值记为t,前景像素点所占比例记为ω0,其平均灰度μ0;背景像素点所占比例记为ω1,其平均灰度为μ1;设图像的大小为m
×
n,图像中像素的灰度值小于阈值t的像素数记为n0,像素灰度大于阈值t的像素数记为n1,则有:
[0067][0068][0069]
图像的总平均灰度μ为:
[0070]
μ=w0×
μ0 w1×
μ1ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0071]
前景和背景的类间方差σ2的计算公式为:
[0072]
σ2=w0(μ
0-μ)2 w1(μ
1-μ)2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(8)
[0073]
当类间方差σ2最大时,对应的灰度值即为所求的最佳阈值,如公式(9)所示:
[0074]
t=arg maxσ2ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(9)
[0075]
ostu算法通过遍历整个图像的灰度值,并计算当其为阈值时的类间方差,寻找最大的类间方差,才得到最佳分割阈值;当图像i(x,y)的尺寸变大时,该算法的计算量也会同步增加;因此,本实施例采用改进的遗传算法来寻找ostu的最优阈值,提高算法的效率。
[0076]
为了获得最优的分割阈值,本实施例对现有的遗传算法做出改进,改进的交叉概率如公式(10)、改进的变异概率如公式(11)所示:
[0077][0078]
其中,p
cmax
是最大交叉概率,f是交叉操作前两个父代中较大的适应度,f
max
是群体中的最大适应度值,f
avg
是群体的平均适应度值;
[0079][0080]
其中,p
mmax
是最大变异概率,f’是变异操作前两个父代中较大的适应度;
[0081]
经对遗传算法改进,优良个体与普通个体之间的差异增加,从而能够实现对最优解的快速搜索。
[0082]
本实施例中,步骤s5的具体实现过程如下:
[0083]
通过利用形态学开运算,先腐蚀后膨胀,用来去除图像中孤立的小点或毛刺,以及在纤细点处分离物体和平滑较大物体的边界,但不会改变其位置和形状;形态学开运算定义如下所示,先用b对a进行腐蚀,然后再用b对其进行膨胀:
[0084][0085]
具体地,测试结果如图2、图3、图4、图5、图6、图7所示。
[0086]
基于相同的发明构思,本发明提出基于retinex图像增强和ostu阈值分割的隔离带检测系统,包括:
[0087]
隔离带图片采集模块:通过巡检机器人采集带有隔离带的图片,并调整所采集图像的大小;
[0088]
图像增强模块:通过retinex算法增强低照度图像光照,改进图像质量;
[0089]
图像灰度模块:用于对图像进行灰度化处理;
[0090]
高斯滤波模块:通过采用高斯平滑滤波器平滑图像除去噪声;
[0091]
阈值分割模块:通过基于改进遗传算法的ostu技术进行阈值分割,区分隔离带目标区域和背景区域,获得初步的二值化图像;
[0092]
形态学运算模块:通过形状学运算,腐蚀、膨胀完善图像;
[0093]
轮廓检测模块:用于进行检测轮廓;
[0094]
隔离带区域选择模块:通过调整轮廓高和宽以及检测位置确定隔离带的具体区域。
[0095]
上述实施例为本发明较佳的实施方式,但本发明的实施方式并不受上述实施例的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,
均应为等效的置换方式,都包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。