1.本技术涉及成像镜头技术领域,更具体地,涉及一种小型机器人用成像镜头。
背景技术:
2.随着自动化和ai人工智能的不断发展,近年来,机器人技术得到了迅猛的发展,光学成像镜头也被广泛地应用到了机器人实景图像的获取,实时动态监控、智能算法处理等领域。对于服务型机器人,要求外形接近于人类,具备一定亲和力。视频获取模块仿真成人眼,采用两颗镜头成像拼接画面,因此对于此类光学成像镜头的有着特殊要求。
3.目前现有的用于机器人的镜头还存在着许多不足之处,例如视场角过大,或者视场角过小;体积较大无法集成至人行机器人上,相对孔径小无法满足在阴天或者光线较弱的环节下使用;在高低温环境下工作,容易出现失焦导致成像模拟的现象;以及性能表现优良但成本昂贵等。因此有必要对其进行设计改进,以满足特定领域类的光学系统要求。
技术实现要素:
4.本实用新型的目的在于:针对目前现有的技术不足,而提供一种小型机器人用成像镜头及光学成像系统。
5.为了解决上述技术问题,本技术实施例提供一种小型机器人用成像镜头及成像光学系统,采用了如下所述的技术方案:
6.一种小型机器人用成像镜头,其包括从物侧至像侧沿一光轴依次设置的第一透镜、第二透镜、光阑、第三透镜、第四透镜、第五透镜和第六透镜;
7.所述第一透镜至第六透镜各自包括一朝向物侧且使成像光线通过的物侧面以及一朝向像侧且使成像光线通过的像侧面;
8.所述第一透镜具负屈光度,所述第一透镜的物侧面为凹面、像侧面为凹面;
9.所述第二透镜具正屈光度,所述第二透镜的物侧面为凸面,像侧面为凸面;
10.所述第三透镜具负屈光度,所述第三透镜的物侧面为凹面,像侧面为凹面;
11.所述第四透镜具正屈光度,所述第四透镜的物侧面为凸面、像侧面为凸面;
12.所述第五透镜具正屈光度,所述第五透镜的物侧面为凸面、像侧面为凸面;
13.所述第六透镜具正屈光度,所述第六透镜的物侧面为凸面、像侧面为凹面。
14.作为本实用新型提供的所述的小型机器人用成像镜头的一种优选实施方式,所述第三透镜的像侧面与第四透镜物侧面胶合。
15.作为本实用新型提供的所述的小型机器人用成像镜头的一种优选实施方式,所述第四透镜的折射率温度系数为负值。如此设计,在一定温度范围满足无热化要求,使得所述成像镜头随着温度变化,透镜和机械件膨胀后,最终像面随着后焦变化而变化,最终成像清晰。
16.作为本实用新型提供的所述的小型机器人用成像镜头的一种优选实施方式,所述第一透镜的折射率nd1和第二透镜的折射率nd2之差的绝对值满足关系式:|nd1-nd2|》0.2。
17.作为本实用新型提供的所述的小型机器人用成像镜头的一种优选实施方式,所述第三透镜的色散系数vd4与第四透镜的色散系数之差绝对值满足关系式:|vd3-vd4|》30。如此设计,便于校正色差。
18.作为本实用新型提供的所述的小型机器人用成像镜头的一种优选实施方式,所述光阑前组的焦距fq和光阑后组的焦距fh满足关系式:fq/fh》3.5。
19.作为本实用新型提供的所述的小型机器人用成像镜头的一种优选实施方式,所述成像镜头还包括设置在所述第六透镜的像侧面一侧的保护片。
20.作为本实用新型提供的所述的小型机器人用成像镜头的一种优选实施方式,所述成像镜头还包括设置在所述第六透镜的像侧面一侧的电子感光元件,所述第一透镜的物侧表面至所述电子感光元件的距离为ttl和所述成像镜头的总焦距f满足关系式:2.9《ttl/f《5。
21.作为本实用新型提供的所述的小型机器人用成像镜头的一种优选实施方式,所述第一透镜至第六透镜的材质为玻璃或塑料。
22.一种小型机器人成像光学系统,其包括2颗如上述的成像镜头,分别作为小型机器人的左右眼。所述成像镜头能够通过两颗镜头仿真人眼位置,单个镜头负责局部视野,一颗负责模拟右眼,一颗模拟左眼,通过图像拼接扩大视野范围,极大的降低了制造成本,同时实现了小型画要求,并且外形美观。
23.与现有技术相比,本技术实施例主要有以下有益效果:
24.1.本技术提供的小型机器人用成像镜头,镜头体积小巧紧凑,整个镜头采用反远距结构,由第一透镜构成前负透镜组(此前负透镜组的光焦度为负值或焦距为负值)结合由第二透镜至第六透镜组成的后正透镜组(此后正透镜组的光焦度为正值或焦距为正值),使得镜头的第一透镜前表面顶点到像面距离小于焦距,从而缩短了物镜的总长。第一透镜具有负屈光度,同时光阑位置略微前移,使得镜头前端缩小外径口径尺寸,进而镜头的外径和总长尽量小,容易集成在小型机器人身上。
25.2.实现大通光大孔径效果。通过设置镜头的f数为特定数值参数,优化镜头镜片参数,校正球差,从而实现fno=1.6的效果(fno的计算公式为f/d,其中f为镜头焦距,d为入瞳直径,fno在实际测量时是间接测量值),在阴天或者的光线不足的照明条件下,可以满足实时视频图像清晰明亮可见,快门曝光时间短,响应快的要求,避免因为通光不足导致的视频图像亮度低,视频响应缓慢的缺点。
26.3.解决镜头因为高低温度环境导致的失焦问题。通过采用正负折射率温度热膨胀系数玻璃组合实现了在-40度到85度宽温度范围内镜头的无热化,从而满足实际应用温度环境下的成像质量要求。
27.4.所述成像镜头进一步缩小现有镜头的外观尺寸,镜头外径可达12mm左右,镜头长度可达18.7mm左右,使得镜头的体积紧凑小巧,同时减轻了镜头的重量;所述成像镜头制造时,无需搭配高端玻璃,搭配常规玻璃即可,以及可降低镜头敏感度,提高镜头生产良率,从而降低生产制造成本。
28.5.该光学成像镜头能够通过两颗镜头仿真人眼位置应用在小型机器人上,单个镜头负责局部视野,一颗负责模拟右眼,一颗模拟左眼,通过图像拼接扩大视野范围,极大的降低了制造成本,同时实现了小型画要求,并且外形美观。
附图说明
29.为了更清楚地说明本技术的方案,下面将对实施例描述中所需要使用的附图作一个简单介绍,显而易见地,下面描述中的附图是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
30.此处所说明的附图仅仅用来提供对本实用新型的进一步理解,构成本实用新型的一部分,本实用新型的示意性实施方案及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。
31.图1为本实用新型成像镜头实施例一的2d结构示意图;
32.图2为本实用新型成像镜头实施例一的场曲畸变示意图;
33.图3为本实用新型成像镜头实施例一的弥散斑示意图;
34.图4为本实用新型成像镜头实施例一的像面主光线角示意图;
35.图5为本实用新型成像镜头实施例一的表面入射角示意图;
36.图6为本实用新型成像镜头实施例一的弥散斑对应视场示意图;
37.图7为本实用新型成像镜头实施例二的2d结构示意图;
38.图8为本实用新型成像镜头实施例二的场曲畸变示意图;
39.图9为本实用新型成像镜头实施例二的弥散斑示意图;
40.图10为本实用新型成像镜头实施例二的像面主光线角示意图;
41.图11为本实用新型成像镜头实施例二的表面入射角示意图;
42.图12为本实用新型成像镜头实施例二的弥散斑对应视场示意图;
43.图13为本实用新型成像镜头实施例三的2d结构示意图;
44.图14为本实用新型成像镜头实施例三的场曲畸变示意图;
45.图15为本实用新型成像镜头实施例三的弥散斑示意图;
46.图16为本实用新型成像镜头实施例三的像面主光线角示意图;
47.图17为本实用新型成像镜头实施例三的表面入射角示意图;
48.图18为本实用新型成像镜头实施例三的弥散斑对应视场示意图;
49.图19为本实用新型成像光学系统实施例一的拼接光学系统示意图。
具体实施方式
50.除非另有定义,本文所使用的所有的技术和科学术语与属于本技术技术领域的技术人员通常理解的含义相同;本文中在申请的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本技术。
51.在本文中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本技术的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是指相同的实施例,也不是与其它实施例互斥的独立的或备选的实施例。本领域技术人员显式地和隐式地理解的是,本文所描述的实施例可以与其它实施例相结合。
52.请参考图1-18,本技术实施例提供了一种小型机器人用成像镜头,其包括从物侧至像侧沿一光轴依次设置的第一透镜、第二透镜、光阑、第三透镜、第四透镜、第五透镜和第六透镜;
53.所述第一透镜至第六透镜各自包括一朝向物侧且使成像光线通过的物侧面以及
一朝向像侧且使成像光线通过的像侧面;
54.所述第一透镜具负屈光度,所述第一透镜的物侧面为凹面、像侧面为凹面;
55.所述第二透镜具正屈光度,所述第二透镜的物侧面为凸面,像侧面为凸面;
56.所述第三透镜具负屈光度,所述第三透镜的物侧面为凹面,像侧面为凹面;
57.所述第四透镜具正屈光度,所述第四透镜的物侧面为凸面、像侧面为凸面;
58.所述第五透镜具正屈光度,所述第五透镜的物侧面为凸面、像侧面为凸面;
59.所述第六透镜具正屈光度,所述第六透镜的物侧面为凸面、像侧面为凹面。
60.本技术提供的小型机器人用成像镜头,镜头体积小巧紧凑,整个镜头采用反远距结构,由前负透镜组和后正透镜组组成,使得镜头的第一透镜前表面顶点到像面距离小于焦距,从而缩短了物镜的总长。第一透镜具有负屈光度,同时光阑位置略微前移,使得镜头前端缩小外径口径尺寸,进而镜头的外径和总长尽量小,容易集成在小型机器人身上。
61.为了使本技术领域的人员更好地理解本技术方案,下面将结合附图,对本技术实施例中的技术方案进行清楚、完整地描述。
62.所述「一透镜具有正屈光率(或负屈光率)」,是指所述透镜以高斯光学理论计算出来的近轴屈光率为正(或为负)。所述「透镜的物侧面(或像侧面)」定义为成像光线通过透镜表面的特定范围。透镜的面形凹凸判断可依该领域中通常知识者的判断方式,即通过曲率半径(简写为r值)的正负号来判断透镜面形的凹凸。r值可常见被使用于光学设计软件中,例如zemax或codev。r值亦常见于光学设计软件的透镜资料表(lens data sheet)中。以物侧面来说,当r值为正时,判定为物侧面为凸面;当r值为负时,判定物侧面为凹面。反之,以像侧面来说,当r值为正时,判定像侧面为凹面;当r值为负时,判定像侧面为凸面。
63.本技术一种小型机器人用成像镜头的实施例一
64.如图1所示,一种小型机器人成像镜头,从物侧至像侧沿一光轴依次包括第一透镜1、第二透镜2、光阑7、第三透镜3、第四透镜4、第五透镜5、第六透镜6以及保护片8;所述第一透镜至第六透镜各自包括一朝向物侧且使成像光线通过的物侧面以及一朝向像侧且使成像光线通过的像侧面;其中,
65.所述第一透镜1具负屈光度,所述第一透镜的物侧面11为凹面、像侧面12为凹面;
66.所述第二透镜2具正屈光度,所述第二透镜的物侧面21为凸面,像侧面22为凸面;
67.所述第三透镜3具负屈光度,所述第三透镜的物侧面31为凹面,像侧面32为凹面;
68.所述第四透镜4具正屈光度,所述第四透镜的物侧面41为凸面、像侧面42为凸面;
69.所述第五透镜5具正屈光度,所述第五透镜的物侧面51为凸面、像侧面52为凸面;
70.所述第六透镜6具正屈光度,所述第六透镜的物侧面61为凸面、像侧面62为凹面;
71.该光学成像镜头具有屈光率的透镜只有上述六片。
72.本实施例中,第三透镜的像侧面32与第四透镜物侧面41相互胶合。
73.本实施例中,第一透镜1至第六透镜6均采用玻璃材料制成,但并不限于此,在其它实施例中,也可以采用塑料等其它光学材料制成。
74.本实施例中,所述第四透镜4的折射率温度系数为负值。
75.本实施例中,为了校正色差,要求所述第三透镜3的色散系数vd4与第四透镜4的色散系数之差绝对值满足关系式:|vd3-vd4|》30。
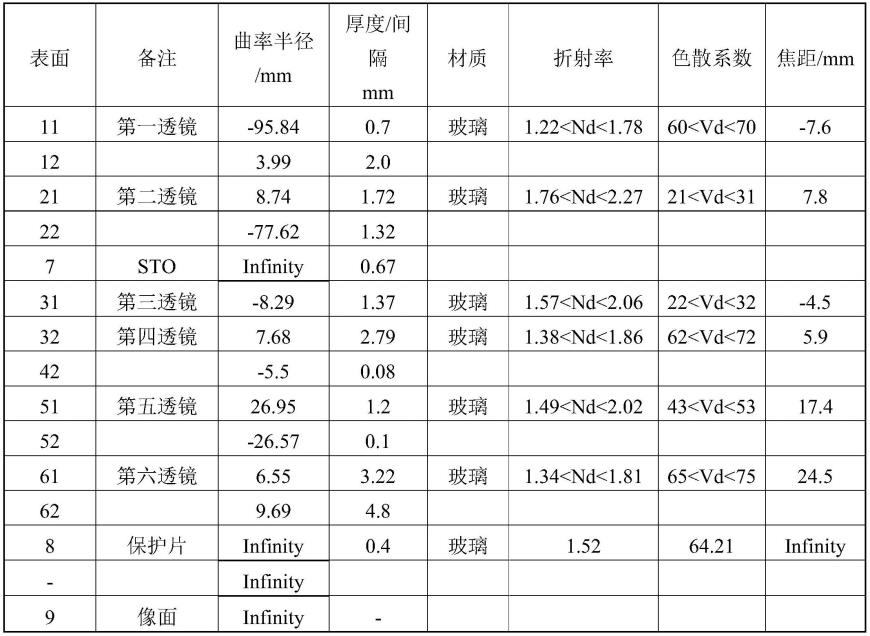
76.本实施例的详细光学数据如表1-1所示。
77.表1-1实施例一的详细光学数据
[0078][0079]
本实施例的相关条件表达式数值请参考表4。
[0080]
本实施例的场曲畸变详见图2,左侧为场曲图,横坐标为数值,单位为毫米。纵坐标为归一化的视场,单位为无量纲。从图2可以得知,该光学系统的子午场曲和弧矢场曲在0.9视场交叉,光学系统在0.9视场消像散,使得全视场和0.5视场的像散较小,整个场曲在0.05mm以内。右侧为光学相对畸变图,横坐标为相对畸变百分比,纵坐标为归一化视场,单位为无量纲。从图中可以得知,该光学系统的光学相对畸变在-20%范围内,虽然存在一定变形但满足人眼观察使用。
[0081]
本实施例的弥散斑图详见图3和图6,由图3可知该光学系统的中心均方根弥散斑半径为3.099mm,全视场角最大弥散斑半径为32μm,656nm与486nm波长弥散斑高度重合。
[0082]
本实施例的像面入射主光线图详见图4,横坐标为归一化的视场,单位为无量纲。纵坐标为角度值,单位为度。从图中可以得到:该光学系统最大主光线角为10.74
°
。
[0083]
本实施例的各个表面的入射角详见图5,横坐标为表面序号,单位为无量纲。纵坐标为角度值,单位为度。从图中可以得到:该光学系统最大入射角为46
°
,最小入射角为14
°
左右。最大与最小值像差32
°
。
[0084]
本技术一种小型机器人用成像镜头的实施例二
[0085]
如图7所示,一种小型机器人成像镜头,从物侧至像侧沿一光轴依次包括第一透镜1、第二透镜2、光阑7、第三透镜3、第四透镜4、第五透镜5、第六透镜6以及保护片8;所述第一透镜至第六透镜各自包括一朝向物侧且使成像光线通过的物侧面以及一朝向像侧且使成像光线通过的像侧面;其中,
[0086]
所述第一透镜1具负屈光度,所述第一透镜的物侧面11为凹面、像侧面12为凹面;
[0087]
所述第二透镜2具正屈光度,所述第二透镜的物侧面21为凸面,像侧面22为凸面;
[0088]
所述第三透镜3具负屈光度,所述第三透镜的物侧面31为凹面,像侧面32为凹面;
[0089]
所述第四透镜4具正屈光度,所述第四透镜的物侧面41为凸面、像侧面42为凸面;
[0090]
所述第五透镜5具正屈光度,所述第五透镜的物侧面51为凸面、像侧面52为凸面;
[0091]
所述第六透镜6具正屈光度,所述第六透镜的物侧面61为凸面、像侧面62为凹面;
[0092]
该光学成像镜头具有屈光率的透镜只有上述六片。
[0093]
本具体实施例中,所述第三透镜的像侧面32与第四透镜物侧面41相互胶合。
[0094]
本具体实施例中,所述第一透镜1至第六透镜6均采用玻璃材料制成,但并不限于此,在其它实施例中,也可以采用塑料等其它光学材料制成。
[0095]
本具体实施例中,所述第四透镜4的折射率温度系数为负值。
[0096]
本具体实施例中,为了校正色差,要求第三透镜3的色散系数vd4与第四透镜4的色散系数之差绝对值满足关系式:|vd3-vd4|》30。
[0097]
本具体实施例的详细光学数据如表2-1所示。
[0098]
表2-1实施例二的详细光学数据
[0099][0100][0101]
本具体实施例的相关条件表达式数值请参考表4。
[0102]
本具体实施例的场曲畸变详见图8,左侧为场曲图,横坐标为数值,单位为毫米。纵坐标为归一化的视场,单位为无量纲。从图8可以得知,该光学系统的子午场曲和弧矢场曲在0.9视场交叉,光学系统在0.9视场消像散,使得全视场和0.5视场的像散较小,整个场曲在0.05mm以内。右侧为光学相对畸变图,横坐标为相对畸变百分比,纵坐标为归一化视场,单位为无量纲。从图中可以得知,该光学系统的光学相对畸变在-17.6%范围内,虽然存在一定变形但满足人眼观察使用。
[0103]
本具体实施例的弥散斑图详见图9和图12,由图9可知该光学系统的中心均方根弥散斑半径为2.096mm,全视场角最大弥散斑半径为20.6μm,656nm与486nm波长弥散斑高度重合。
[0104]
本具体实施例的像面入射主光线图详见图10,横坐标为归一化的视场,单位为无量纲。纵坐标为角度值,单位为度。从图中可以得到:该光学系统最大主光线角为10.81
°
。
[0105]
本具体实施例的各个表面的入射角详见图11,横坐标为表面序号,单位为无量纲。纵坐标为角度值,单位为度。从图中可以得到:该光学系统最大入射角为44
°
,最小入射角为13
°
左右。最大与最小值像差31
°
。
[0106]
本技术一种小型机器人用成像镜头的实施例三
[0107]
如图13所示,一种小型机器人成像镜头,从物侧至像侧沿一光轴依次包括第一透镜1、第二透镜2、光阑7、第三透镜3、第四透镜4、第五透镜5、第六透镜6以及保护片8;所述第一透镜至第六透镜各自包括一朝向物侧且使成像光线通过的物侧面以及一朝向像侧且使成像光线通过的像侧面;其中,
[0108]
所述第一透镜1具负屈光度,所述第一透镜的物侧面11为凹面、像侧面12为凹面;
[0109]
所述第二透镜2具正屈光度,所述第二透镜的物侧面21为凸面,像侧面22为凸面;
[0110]
所述第三透镜3具负屈光度,所述第三透镜的物侧面31为凹面,像侧面32为凹面;
[0111]
所述第四透镜4具正屈光度,所述第四透镜的物侧面41为凸面、像侧面42为凸面;
[0112]
所述第五透镜5具正屈光度,所述第五透镜的物侧面51为凸面、像侧面52为凸面;
[0113]
所述第六透镜6具正屈光度,所述第六透镜的物侧面61为凸面、像侧面62为凹面;
[0114]
该光学成像镜头具有屈光率的透镜只有上述六片。
[0115]
本具体实施例中,所述第三透镜的像侧面32与第四透镜物侧面41相互胶合。
[0116]
本具体实施例中,所述第一透镜1至第六透镜6均采用玻璃材料制成,但并不限于此,在其它实施例中,也可以采用塑料等其它光学材料制成。
[0117]
本具体实施例中,所述第四透镜4的折射率温度系数为负值。
[0118]
本具体实施例中,为了校正色差,要求第三透镜3的色散系数vd4与第四透镜4的色散系数之差绝对值满足关系式:|vd3-vd4|》30。
[0119]
本具体实施例的详细光学数据如表3-1所示。
[0120]
表3-1实施例三的详细光学数据
[0121][0122]
本具体实施例的相关条件表达式数值请参考表4。
[0123]
本具体实施例的场曲畸变详见图14,左侧为场曲图,横坐标为数值,单位为毫米。纵坐标为归一化的视场,单位为无量纲。从图14可以得知,该光学系统的子午场曲和弧矢场曲在0.9视场交叉,光学系统在0.9视场消像散,使得全视场和0.5视场的像散较小,整个场曲在0.05mm以内。右侧为光学相对畸变图,横坐标为相对畸变百分比,纵坐标为归一化视场,单位为无量纲。从图中可以得知,该光学系统的光学相对畸变在-17.6%范围内,虽然存在一定变形但满足人眼观察使用。
[0124]
本具体实施例的弥散斑图详见图15和图18,由图9可知该光学系统的中心均方根弥散斑半径为2.8mm,全视场角最大弥散斑半径为21.1μm,656nm与486nm波长弥散斑高度重合。
[0125]
本具体实施例的像面入射主光线图详见图16,横坐标为归一化的视场,单位为无量纲。纵坐标为角度值,单位为度。从图中可以得到:该光学系统最大主光线角为10.81
°
。
[0126]
本具体实施例的各个表面的入射角详见图17,横坐标为表面序号,单位为无量纲。纵坐标为角度值,单位为度。从图中可以得到:该光学系统最大入射角为46
°
,最小入射角为14
°
左右。最大与最小值像差32
°
。
[0127]
表4本实用新型三个实施例的相关重要参数值
[0128] 实施例一实施例二实施例三ttl/f3.793.93.91f2/f1.461.51.54|nd1-nd2|0.50.50.5
|vd3-vd4|44.844.844.8fq/fh4.394.967.93
[0129]
本技术一种小型机器人成像光学系统的实施例1
[0130]
一种小型机器人成像光学系统,其包括2颗如上述实施例1至3任一种的成像镜头,分别作为小型机器人的左右眼,如图19所示的小型机器人成像光学系统图,由两颗所述成像镜头(lens1、lens2)组成,单颗镜头视场角为72
°
,通过两颗镜头可以扩大物面的拍摄范围,同时降低单颗镜头的加工难度,和制造成本,同时有利于小型化要求。
[0131]
两颗所述成像镜头通过满足人眼位置布局,将广角图像拆分为两个完全一样的中等视场镜头,有效地提高了性能,节省了制造成本。所述成像镜头能够通过两颗镜头仿真人眼位置,单个镜头负责局部视野,一颗负责模拟右眼,一颗模拟左眼,通过图像拼接扩大视野范围,极大的降低了制造成本,同时实现了小型画要求,并且外形美观。
[0132]
在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型的限制。
[0133]
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本实用新型的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。本技术的说明书和权利要求书及上述附图说明中的术语“包括”和“具有”以及它们的任何变形,意图在于覆盖不排他的包含。
[0134]
在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接或彼此可通讯;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
[0135]
显然,以上所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例,附图中给出了本技术的较佳实施例,但并不限制本技术的专利范围。本技术可以以许多不同的形式来实现,相反地,提供这些实施例的目的是使对本技术的公开内容的理解更加透彻全面。尽管参照前述实施例对本技术进行了详细的说明,对于本领域的技术人员来而言,其依然可以对前述各具体实施方式所记载的技术方案进行修改,或者对其中部分技术特征进行等效替换。凡是利用本技术说明书及附图内容所做的等效结构,直接或间接运用在其他相关的技术领域,均同理在本技术专利保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
