1.本发明属于电机生产检测技术领域,更具体的说涉及一种瞬态反向扭矩安全保护方法。
背景技术:
2.电驱动系统作为新能源汽车的核心零部件,新产品性能摸底、电机标定、整车模拟负载、部分出厂试验、特殊加载工况都需要进行电机对拖台架试验。两台电机控制器控制两台电机的情况,当陪试电机控制器控制电机出故障时,被试电机控制器扭矩控制会失效造成转速上升,当上升转速产生的反电势较大时,可能会对电机控制器甚至于模拟电池造成损坏。针对这一问题,目前采取的措施以及效果:1、扭矩控制的电机控制器人为限值转速,但是在众多电机标定、整车模拟负载、特殊工况加载等试验程序固化,人为修改转速的意识不强,且有些固化情况下转速不能进行修改。2、选用耐反电势值更高的电机控制器,这样对电机控制器的硬件要求更高,同时经济费用也会提高。
技术实现要素:
3.针对现有技术的不足,本发明提供了一种采用上位机来读取陪试电机控制器的代码,当出现故障时被试电机控制器通过上位机读取此故障代码,使被试电机输出反向力矩,防止转速上升,本发明成本低、便于操作。
4.为实现上述目的,本发明提供了如下技术方案:一种瞬态反向扭矩安全保护方法,包括被试电机、被试电机控制器、陪试电机和陪试电机控制器,所述被试电机控制器与所述被试电机连接,陪试电机控制器与陪试电机连接,所述被试电机与陪试电机之间设置有联轴器,还包括上位机,被试电机控制器与陪试电机控制器通过上位机进行通讯,方法为,由被试电机控制器和陪试电机控制器正常给定扭矩和转速,当陪试电机出现失速转速上升时,由上位机采集陪试电机控制器的故障码,被试电机控制器采集上位机的故障码,给定被试电机反向力矩,阻止转速上升。
5.进一步的所述联轴器为离合式联轴器。
6.进一步的所述离合式联轴器连接上位机,在被试电机控制器采集上位机的故障码,给定被试电机反向力矩后,控制离合式联轴器断开。
7.进一步的所述的被试电机控制器仅采集读取陪试电机控制器的代码,不做发送控制代码。
8.进一步的在上位机采集到陪试电机控制器的故障码后,记录并存储此故障码信息。
9.与现有技术相比,本发明的有益效果是:
10.1、电机失速致转速快速升高的情况下,产生的反电势较高,当超过电机控制器模块igbt以及模拟电池的耐压值时,可能会造成损坏,损坏之后维修成本较高,本发明可以防止因为反电势过高而损坏模块带来经济损失;
11.2、电机对拖试验时,人为修改保护限值转速可能忘记,本发明转速保护限值可以不用人为在进行修改;
12.3、选择合适的电机控制器进行电机标定,不用选择耐反电势值高的电机控制器,节省成本;
13.4、电机试验时,软件多一层保护,节省试验时间,提升效率;
14.5、失速时转速不会在短时间内上升,有效的减小了机械联轴器部分的损伤。
附图说明
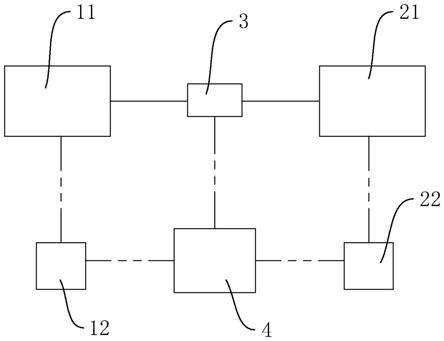
15.图1为本发明的控制示意图。
16.附图标记:11、被试电机;12、被试电机控制器;21、陪试电机;22、陪试电机控制器;3、联轴器;4、上位机。
具体实施方式
17.参照图1对本发明瞬态反向扭矩安全保护方法的实施例做进一步说明。
18.在本发明的描述中,需要说明的是,对于方位词,如有术语“中心”,“横向(x)”、“纵向(y)”、“竖向(z)”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示方位和位置关系为基于附图所示的方位或位置关系,仅是为了便于叙述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定方位构造和操作,不能理解为限制本发明的具体保护范围。
19.此外,如有术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或隐含指明技术特征的数量。由此,限定有“第一”、“第二”特征可以明示或者隐含包括一个或者多个该特征,在本发明描述中,“数个”、“若干”的含义是两个或两个以上,除非另有明确具体的限定。
20.一种瞬态反向扭矩安全保护方法,包括被试电机11、被试电机控制器12、陪试电机控制器22和陪试电机控制器22控制器,所述被试电机控制器12与所述被试电机11连接,陪试电机控制器22控制器与陪试电机控制器22连接,所述被试电机11与陪试电机控制器22之间设置有联轴器3,还包括上位机4,被试电机控制器12与陪试电机控制器22控制器通过上位机4进行通讯,方法为,由被试电机控制器12和陪试电机控制器22控制器正常给定扭矩和转速,当陪试电机控制器22出现失速转速上升时,由上位机4采集陪试电机控制器22控制器的故障码,被试电机控制器12采集上位机4的故障码,给定被试电机11反向力矩,阻止转速上升。
21.基于电机控制器dsp强大的通讯功能且反应非常迅速,通讯反应级别为ms级别,往后电机控制器硬件能力更加强大,通讯响应会更加迅速。
22.电机控制器扭矩控制,id和iq正常给定,当出现失速转速上升的瞬间,给定反方向的iq,产生一个反方向的力矩,限值转速的上升。
23.反向力矩的判定机制:陪试电机控制器22控制器与被试电机控制器12的上位机4软件进行通讯,被试电机控制器12的上位机4软件只采集陪试电机控制器22控制器的故障码,当陪试电机控制器22控制器报故瞬间,被试电机控制器12采集到陪试电机控制器22控
制器已经报故障,给定反向力矩,防止转速上升。
24.本实施例优选的的所述联轴器3为离合式联轴器3。
25.本实施例优选的所述离合式联轴器3连接上位机4,在被试电机控制器12采集上位机4的故障码,给定被试电机11反向力矩后,控制离合式联轴器3断开,以避免联轴器3部分的损坏。
26.在本实施例中还可以提前设置转速的阈值,当转速达到阈值后再控制离合式联轴器3断开,以卸载扭矩。
27.本实施例优选的在上位机4采集到陪试电机控制器22控制器的故障码后,记录并存储此故障码信息。
28.以上所述仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
技术特征:
1.一种瞬态反向扭矩安全保护方法,其特征在于:包括被试电机、被试电机控制器、陪试电机和陪试电机控制器,所述被试电机控制器与所述被试电机连接,陪试电机控制器与陪试电机连接,所述被试电机与陪试电机之间设置有联轴器,还包括上位机,被试电机控制器与陪试电机控制器通过上位机进行通讯,方法为,由被试电机控制器和陪试电机控制器正常给定扭矩和转速,当陪试电机出现失速转速上升时,由上位机采集陪试电机控制器的故障码,被试电机控制器采集上位机的故障码,给定被试电机反向力矩,阻止转速上升。2.根据权利要求1所述的瞬态反向扭矩安全保护方法,其特征在于:所述联轴器为离合式联轴器。3.根据权利要求2所述的瞬态反向扭矩安全保护方法,其特征在于:所述离合式联轴器连接上位机,在被试电机控制器采集上位机的故障码,给定被试电机反向力矩后,控制离合式联轴器断开。4.根据权利要求3所述的瞬态反向扭矩安全保护方法,其特征在于:所述的被试电机控制器仅采集读取陪试电机控制器的代码,不做发送控制代码。5.根据权利要求4所述的瞬态反向扭矩安全保护方法,其特征在于:在上位机采集到陪试电机控制器的故障码后,记录并存储此故障码信息。
技术总结
本发明公开了一种瞬态反向扭矩安全保护方法,包括被试电机、被试电机控制器、陪试电机和陪试电机控制器,所述被试电机控制器与所述被试电机连接,陪试电机控制器与陪试电机连接,所述被试电机与陪试电机之间设置有联轴器,还包括上位机,被试电机控制器与陪试电机控制器通过上位机进行通讯,方法为,由被试电机控制器和陪试电机控制器正常给定扭矩和转速,当陪试电机出现失速转速上升时,由上位机采集陪试电机控制器的故障码,被试电机控制器采集上位机的故障码,给定被试电机反向力矩,阻止转速上升,本发明当出现故障时被试电机控制器通过上位机读取此故障代码,使被试电机输出反向力矩,防止转速上升,本发明成本低、便于操作。操作。操作。
技术研发人员:黄武 赵磊磊 陈康昊 黄成亮
受保护的技术使用者:株洲尚驰电气有限公司
技术研发日:2021.11.15
技术公布日:2022/2/23
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。