1.本实用新型涉及水工建筑领域,特别是一种水工建筑表观病害检测装置。
背景技术:
2.作为广泛应用于水利工程的水工建筑物,其大部分基础结构处于水下环境。一方面水下环境如水力冲蚀、温度应力、风浪等对建构造成较大影响;另一方面水下建构的内部结构应力也会对建筑物本身造成较大破坏。
3.水工建筑表面的病害能客观反映建筑物的完好程度,常见的病害如裂缝、孔洞、剥落等。较轻的病害在形成开始时对建筑物没有明显的影响,随着时间推移,较轻的病害会快速侵蚀建筑物结构的完整性,造成不可逆转的损害。因此,对水工建筑表观病害进行周期性检测,及时发现早期病害并且进行修复,是性价比较高的水工建筑维护方法。
4.现有技术中,对水工建筑表观病害进行周期性检测的方法,通常为:人工携带相机潜入水下,对不同深度和不同宽度位置的水工建筑表面进行拍照。然后,人工对照片进行裂缝、孔洞、剥落等病害的筛查。这种检测方法还存在着如下不足,有待进行改进:
5.1、当水工建筑高度较高且宽度较宽时,一次监测,耗费时间长,也即人工在水下作业时间长,人工劳动强度大,检测效率低下。
6.2、人工拍摄时,相机镜头与水工建筑表面之间的距离难以确定,因而,一方面拍摄的水工建筑表面的图片清晰度质量难以保证;另一方面,当后续人工筛查出水工建筑表面具有裂缝、空洞或剥落等病害时,由于相机镜头与水工建筑表面之间的距离难以确定,故而不能根据照片上的裂缝大小、空洞大小或剥落大小等,推算出裂缝、空洞或剥落等病害的实际值,需要人工再次潜入水下进行现场确认。同时,由于拍摄位置也是大概估测值,需要对拍摄照片进行逐个编号对应。故而现场确认时,需要对病害的具体位置进行二次确认,因而耗时耗力。
技术实现要素:
7.本实用新型要解决的技术问题是针对上述现有技术的不足,而提供一种水工建筑表观病害检测装置,该水工建筑表观病害检测装置能水工建筑表面按照设定路径进行自动、连续拍照,且能自动记录照片拍摄时的准确位置信息,故而能对照片上的裂缝、孔洞、剥落等病害,进行准确的位置判断。同时,拍摄时,能使摄像机镜头与水工建筑表面之间的距离保持恒定,故而能够得到清晰的水工建筑表面图片,还能对发现的裂缝、空洞或剥落等病害实际值大小进行准确推算。
8.为解决上述技术问题,本实用新型采用的技术方案是:
9.一种水工建筑表观病害检测装置,包括检测本体构架、高度升降机构、行走推进机构、病害检测单元和位置检测单元。
10.检测本体构架包括桁架、机舱和支架。
11.桁架呈圆形,沿周向均匀布设有若干个与外界环境相连通的桁架腔。
12.机舱同轴设置在桁架的中心,且机舱的外壁通过若干根所述支架与桁架相连接;机舱包括舱室和同轴罩设在舱室顶部外周的透明罩。
13.高度升降机构包括气囊和气泵;在每个桁架腔内布设一个所述气囊,每个气囊均设置有充气管和放气管;充气管的另一端与气泵相连接,放气管的另一端与外界环境相连通。
14.行走推进机构为沿机舱对称布设的若干个螺旋桨推进机构。
15.病害检测单元包括摄像机和补光光源;摄像机安装在机舱的舱室内,摄像机的镜头正对透明罩;补光光源布设在桁架或支架上,用于向待检测的水工建筑表面投射光源。
16.位置检测单元设置在舱室内,包括超声波传感器和摄像机定位组件。
17.超声波传感器能检测自身与待检测水工建筑的距离。
18.摄像机定位组件能对实时检测摄像机的位置信息。
19.桁架腔、气囊和支架均为四个,支架和桁架腔一一对应,且桁架腔关于对应支架对称布设;气囊位于对应桁架腔的中心。
20.螺旋桨推进机构的数量为四个,分别设置在四个支架的中心,每个螺旋桨推进机构均包括推进套筒、螺旋桨和电机;推进套筒竖直布设,螺旋桨和电机均设置在推进套筒内,电机用于驱动螺旋桨旋转。
21.每个推进套筒的顶部均设置有防护网。
22.气泵为出水气泵,设置在岸边,在舱室的底部设置有出线接口;与气囊连接的气管从出线接口穿出后与出水气泵相连接。
23.摄像机为720p广角无畸变摄像机。
24.补光光源包括led灯带和探照灯;led灯带呈环形布设在桁架的顶面,探照灯为四个,设置在与支架相对应的桁架上。
25.摄像机定位组件设置在摄像机外周的舱室内,为gps定位系统或北斗定位系统,能对摄像机的位置信息进行定位。
26.还包括通过无线或有线相连接水下控制器和水上控制平台,水下控制器内置在舱室内,且分别与高度升降机构、行走推进机构、病害检测单元和位置检测单元相连接。
27.水下控制器是型号为stm32f103rb的单片机。
28.本实用新型具有如下有益效果:
29.1、高度升降机构通过调整若干个气囊中的充放气量,进而实现桁架与水工建筑表面相平行,且摄像机的镜头垂直正对水工建筑表面。此时,行走推进机构启动,在保证桁架与水工建筑表面相平行的前提下,通过控制行走推进机构的前后行走量,进而使得摄像机与水工建筑表面的距离保持恒定。摄像机启动拍摄,在拍摄的同时,位置检测单元能自动记录拍摄时相机的位置信息,并将记录的位置信息显示在拍摄的照片上。另外,在保证桁架与水工建筑表面相平行的前提下,进一步调整各个气囊的充放气量,从而实现摄像机的高度升降。从而能实现不同深度的水工建筑表面的图像拍摄,也即能水工建筑表面按照设定路径进行自动、连续拍照,且能自动记录照片拍摄时的准确位置信息,故而能对照片上的裂缝、孔洞、剥落等病害,进行准确的位置判断。同时,拍摄时,能使摄像机镜头与水工建筑表面之间的距离保持恒定,故而能够得到清晰的水工建筑表面图片,还能对发现的裂缝、空洞或剥落等病害实际值大小进行准确推算。
30.2、本技术在提高检测效率,节省水工建筑维护成本的同时,还能避免人员下水观测存在的危险性,节约维护检测人员的时间。
附图说明
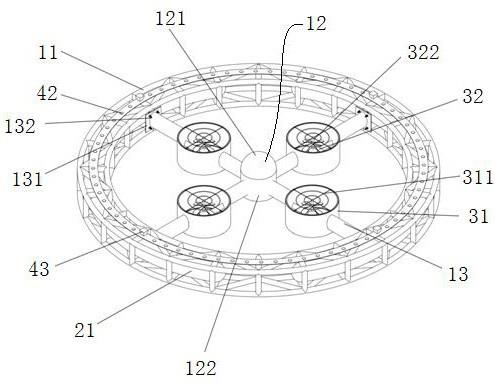
31.图1显示了本实用新型一种水工建筑表观病害检测装置的立体三维图。
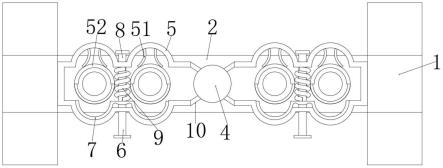
32.图2显示了本实用新型一种水工建筑表观病害检测装置的底面结构示意图。
33.图3显示了本发明中舱室内摄像机和位置检测单元的布设位置示意图。
34.其中有:
35.11.桁架;
36.12.机舱;121.透明罩;122.舱室;123.出线接口;
37.13.支架;131.固定夹片;132.螺栓;
38.21.气囊;
39.31.推进套筒;311.防护网;32.螺旋桨;321.电机;322.传动轴;323.防水密封管;
40.40.摄像机;41.摄像机安装板;42.led灯带;43.探照灯;44.云台;
41.51.超声波传感器;52.速度计;53.深度计;54.电子罗盘;55.陀螺仪。
具体实施方式
42.下面结合附图和具体较佳实施方式对本实用新型作进一步详细的说明。
43.本实用新型的描述中,需要理解的是,术语“左侧”、“右侧”、“上部”、“下部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,“第一”、“第二”等并不表示零部件的重要程度,因此不能理解为对本实用新型的限制。本实施例中采用的具体尺寸只是为了举例说明技术方案,并不限制本实用新型的保护范围。
44.如图1和图2所示,一种水工建筑表观病害检测装置,包括检测本体构架、高度升降机构、行走推进机构、病害检测单元、位置检测单元、水下控制器和水上控制平台。
45.检测本体构架包括桁架11、机舱12和支架13。
46.桁架呈圆形,沿周向均匀布设有若干个与外界环境相连通的桁架腔,优选为四个。
47.机舱同轴设置在桁架的中心,且机舱的外壁通过若干根支架与桁架相连接。支架也优选为四个,且和桁架腔一一对应,优选桁架腔关于对应支架对称布设。这样设置,整个检测本体构架的姿态更为平衡。
48.上述支架的一端优选与机舱外壁面相焊接,支架的另一端优选通过固定夹片131和螺栓132与桁架内壁相连接。
49.机舱包括舱室122和同轴罩设在舱室顶部外周的透明罩121。其中,透明罩优选为玻璃钢罩。舱室的底面优选设置有出线接口123,用于电缆线和下述气管等的出线。
50.高度升降机构包括气囊21和气泵。
51.在每个桁架腔内布设一个气囊,气囊优选位于对应桁架腔的中心。
52.每个气囊均设置有充气管和放气管;充气管的另一端与气泵相连接,放气管的另一端与外界环境相连通。
53.上述气泵有如下两种优选实施例。
54.实施例1:上述气泵可以为水下气泵,水下气泵优选设置在舱室底部或舱室内。与气囊连接的气管从出线接口穿出后与水下气泵相连接。
55.实施例2:气泵为出水气泵,设置在岸边,与气囊连接的气管从出线接口穿出后与出水气泵相连接。
56.充气管(也可以为水泵充气孔)和放气管上均设置有电磁阀,电磁阀能够自动计量充气管或放气管中的气体流量。通过控制电磁阀的开启时间和开合度,进而能够控制充气和放气的气量和速度,具体控制方法为现有技术,这里不再详述。
57.行走推进机构为沿机舱对称布设的若干个螺旋桨推进机构。
58.螺旋桨推进机构的数量为四个,分别设置在四个支架的中心,每个螺旋桨推进机构均包括推进套筒31、防护网311、螺旋桨32和电机321。
59.推进套筒竖直布设,每个推进套筒的顶部和底部均优选设置有防护网,防止树叶等杂质进入推进套筒内。
60.螺旋桨和电机均设置在推进套筒内,电机优选通过传动轴322驱动螺旋桨旋转。传动轴的外周优选套设有防水密封管323。
61.病害检测单元包括摄像机40和补光光源。
62.如图3所示,机舱的舱室内优选设置有摄像机安装板41。
63.摄像机优选云台44安装在摄像机安装板41,摄像机的镜头正对透明罩。摄像机优选为720p广角无畸变摄像机。
64.补光光源布设在桁架或支架上,用于向待检测的水工建筑表面投射光源。补光光源有包括led灯带42和探照灯43;led灯带呈环形布设在桁架的顶面,探照灯为四个,设置在与支架相对应的桁架上。
65.位置检测单元设置在舱室内,包括超声波传感器51和摄像机定位组件。
66.超声波传感器能检测自身与待检测水工建筑的距离,具体检测方法为现有技术。
67.摄像机定位组件能对实时检测摄像机的位置信息。
68.摄像机定位组件设置在摄像机外周的摄像机安装板上,为gps定位系统或北斗定位系统,能对摄像机的位置信息进行定位。
69.本实施例中,摄像机定位组件优选为gps定位系统,包括gps定位模块56、速度计52、深度计53、电子罗盘54和陀螺仪55等。
70.上述水下控制器也优选安装在摄像机安装板上,分别与高度升降机构、行走推进机构、病害检测单元和位置检测单元相连接。水下控制器优选是型号为stm32f103rb的单片机,优选通过无线或有线的方式与水上控制平台相连接。水上控制平台优选为智能手机、ipad或电脑等。
71.上述水工建筑表观病害检测装置的检测原理如下:
72.步骤1、使用前检测:使用前安装好气囊、支架、led灯带与探照灯;然后,检查推进器筒上的防护网有无堵塞、检查推进器筒内的螺旋桨有无堵塞、能否正常转动。
73.步骤2、气囊充气:检测装置在入水前,所有气囊均充满气体,检测本体构件与水平相平行。
74.步骤3、调整入水角度:将最接近待检测水工建筑表面的气囊进行放气,根据待检
测水工建筑表面的倾斜角度,控制最接近待检测水工建筑表面的气囊的放气量,优选使得桁架与水工建筑表面相平行,且摄像机的镜头垂直正对水工建筑表面。由于大多数待检测水工建筑表面均垂直布设,故而桁架基本为垂直水面入水。垂直入水的控制方法通常为:将最接近待检测水工建筑表面的气囊中的气体全部放出即可。
75.步骤4、距离调整:行走推进机构启动,在保证桁架与水工建筑表面相平行的前提下,通过控制行走推进机构的前后行走量,进而使得摄像机与水工建筑表面的距离保持恒定。
76.步骤5、高度下降:在保证桁架与水工建筑表面相平行的前提下,进一步调整高度升降机构中各个气囊的充放气量,从而实现摄像机的高度升降。在高度下降过程中,超声波传感器对自身与水工建筑表面之间的距离进行实时检测,并反馈与调整。同时,超声波传感器还能四周障碍物进行检测与避障。
77.步骤6、拍照:位置检测单元能自动记录拍摄时相机的位置信息,当摄像机下降至设定位置时,摄像机将拍摄一张水工建筑表面图像,并优选将标记有位置信息的水工建筑表面图像通过水下控制器传输给水上控制平台。
78.步骤7、病害检测:水上控制平台对接收到的标记有位置信息的水工建筑表面图像进行筛查,具体筛查方法可以是人工筛查,也可以是自动筛查。自动筛查优选为采用卷积神经网络的方法先得到关于病害的数据模型,具体训练方法为现有技术,这里不再赘述,从而能实现病害类型的自动筛查。由于拍摄时,能使摄像机镜头与水工建筑表面之间的距离保持恒定,故而能够得到清晰的水工建筑表面图片,还能对发现的裂缝、空洞或剥落等病害实际值大小进行准确推算。
79.步骤8、重复步骤4至7,从而实现不同深度处的水工建筑表面图像拍摄与病害检测。也即能水工建筑表面按照设定路径进行自动、连续拍照,且能自动记录照片拍摄时的准确位置信息,故而能对照片上的裂缝、孔洞、剥落等病害,进行准确的位置判断。
80.以上详细描述了本实用新型的优选实施方式,但是,本实用新型并不限于上述实施方式中的具体细节,在本实用新型的技术构思范围内,可以对本实用新型的技术方案进行多种等同变换,这些等同变换均属于本实用新型的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。